The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-03-11 00:24:31 -0500 | marked best answer | A silly question about packages organization!!! Inside a package there is initially the two files CMakeList.txt and package.xml and the folder src. From the tutorials, I understood that the scripts belonging to a package should be placed in its scr folder. However, while studying ROS I found many packages that had thier scripts placed in a user created folder called scripts. Taking into account the said, my question is: Why someones creates a new folder called script instead to use the already existing one called scr. Is this a ROS good practices or just a user preference? If it is a good practice, for what I should use the folder script and for what should I use the folder src. Thanks in advance! |
| 2022-07-18 09:36:51 -0500 | received badge | ● Nice Question (source) |
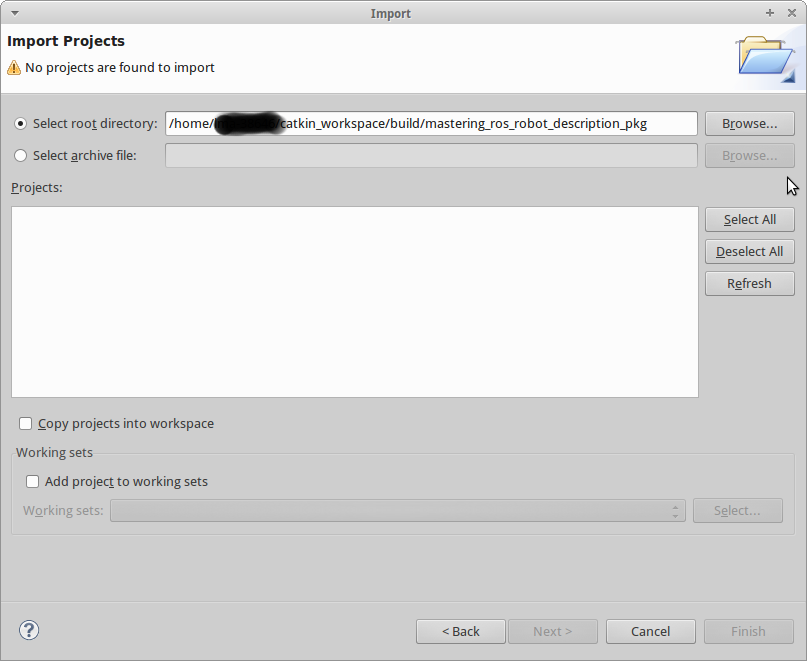
| 2021-05-26 05:24:05 -0500 | marked best answer | Load ROS projects inside Eclipse Hello all, I am trying quite a reasonable time to load a ros package as a project in Eclipse. Of course I am following the steps of section 2.2 Catkin-y approach from the tutorial IDEs but It is not working. I also checked the Catkin and eclipse answer. All the times that I tried to import a package as a Eclipse project I got No projects are found to import as show in the following screeshot:
I will appreciate any king of help or tip like: Should I reinstall eclipse, should I create a new catkin workspace, ... Thanks. |
| 2020-06-24 10:49:50 -0500 | marked best answer | rosconsole DEBUG logger. How to use it? Hello all, I would like to know how to correct interact with the log messages generated by ROS. I did some research about it but I could not find a satisfactory material. The situation that motivated this question was: I am running a simple bagfile with scan data information. To avoid the problem with the difference of time between the machine and the scan data from the bagfile I used the flag --clock as suggested in the appropriate documentation, however I did not set the parameter use_sim_time to true. Because of this, when I try to see the scan data on rviz I receive the following message: Because of this message I tried to somehow turn on the rosconsole logger to DEBUG but I realized that I did not know how to do it. After this contextualization, I redo my question: How can I work correctly with the ROS's log messages, how can I have access to the messages printed from rviz and what is a best practice to handle with analogous situations? Thanks |
| 2020-04-17 02:50:41 -0500 | received badge | ● Great Question (source) |
| 2020-02-11 10:29:06 -0500 | received badge | ● Self-Learner (source) |
| 2019-09-21 18:01:03 -0500 | received badge | ● Good Question (source) |
| 2019-05-20 01:57:24 -0500 | marked best answer | Issue with the urdf_tutorial package and Rviz visualization (Problem may be related with the controller_manager). I am following the Learning URDF Step by Step tutorial which has the following step
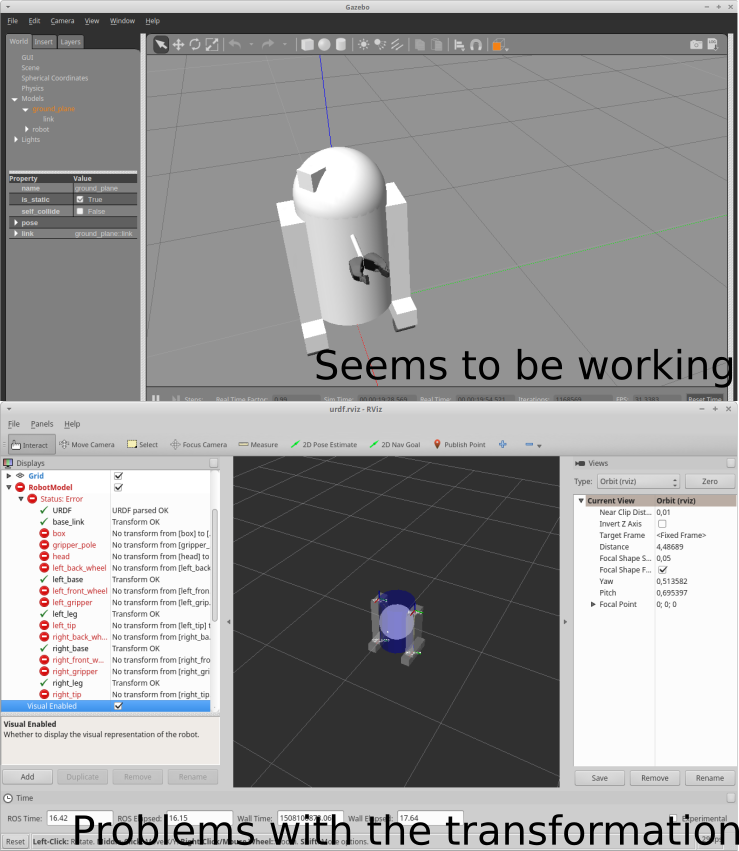
and is based in the urdf_tutorial package. Well, I was able to follow, understand and make it work as it should be until the step four (Using Xacro to Clean Up a URDF File). But I the fifth step (Using a URDF in Gazebo) although I understood the concepts from the documentation I was no able to make it work as it should in ROS + Rviz + Gazebo. Here goes self-explanatory picture
As one can see, the robot visualization in Rviz is broken. This situation was created with the command that uses the urdf_tutorial package obtained from this git. The ros output is: |
| 2019-04-07 22:44:59 -0500 | marked best answer | The recommended way to integrate ROS and GAZEBO to build a robot model Hello, I know that there is a plenty of treads about this subjects but none of them really answered my doubts. But first, a little contextualization. I am using ROS a while and currently I consider myself an intermediate ROS user. Recently I joint a project where I will be developing and implementing algorithms for an autonomous airship. In the scope of the project, there is not an airship simulator integrated with ROS and since it would be a value tool to have I decided to develop one via GAZEBO. In GAZEBO I consider myself a beginner. For now I studying a lot of documentations and tutorials and so I am feeling somewhat drowned by all this new information. So I decided to open this thread as an way to consult some expert in ROS and GAZEBO. Here goes what I want and my questions:
I know that this thread seems a little broad, but I just want an orientation to where to start. For example, If in a few days I make a square floats in GAZEBO that I can move it via ROS it will be a great achievement! |
| 2019-02-11 08:32:00 -0500 | received badge | ● Famous Question (source) |
| 2018-10-10 14:44:41 -0500 | received badge | ● Nice Question (source) |
| 2018-09-18 19:54:21 -0500 | marked best answer | Rosbag and simulated time Hello all, I am trying to run a bag file if simulated time but I am not succeeding on it. Here is what happens: After I run the bag file with the command I am checking the timestamp published by the topic \clock, i.e. the simulated time, and the timestamp presented in another topic, which is not the same as the one from the \clock topic. I need to solve this dyssynchrony, because, otherwise, I will not be able to use the transformations from TF. I know that this file were originally recorded with ORCA and after transformed in .bag format. Maybe, the issue is here. Any guess on how I can solve this issue? Thanks! |
| 2018-09-18 19:53:49 -0500 | received badge | ● Notable Question (source) |
| 2018-09-18 19:53:49 -0500 | received badge | ● Famous Question (source) |
| 2018-09-18 19:53:49 -0500 | received badge | ● Popular Question (source) |
| 2018-09-14 17:24:26 -0500 | marked best answer | How to properly shutdown a node from command coded in the script of the same node I have a simple ros application that is used to create a .world file. Everything is working as expected unless the shutdown process. When the script ends the following message is retrieved: I am unsatisfied with the fist part of the message which is appearing in the red color e may pass the felling the some thing is wrong. So, here is my question: How can I finish in a way clean way, from a command codded in the node script, this node. The node script is: and the launch file used is; I tried the command |
| 2018-07-08 15:51:46 -0500 | received badge | ● Famous Question (source) |
| 2018-06-19 02:20:55 -0500 | received badge | ● Famous Question (source) |
| 2018-06-14 05:05:21 -0500 | received badge | ● Taxonomist |
| 2018-06-04 01:23:52 -0500 | marked best answer | slam_gmapping installation Hello all, I am doing the tutorial How to Build a Map Using Logged Data which requires the use of gmapping. Well, I do not know how to install it. I found an installation option via apt-get but I would like to install from the git repository. The gmapping ROS package is called slam_gmapping and from its web page the git repository address available is https://github.com/ros-perception/sla... . Someone can give me instructions on how to install slam_gmapping package via clonning the its repository? Thanks |
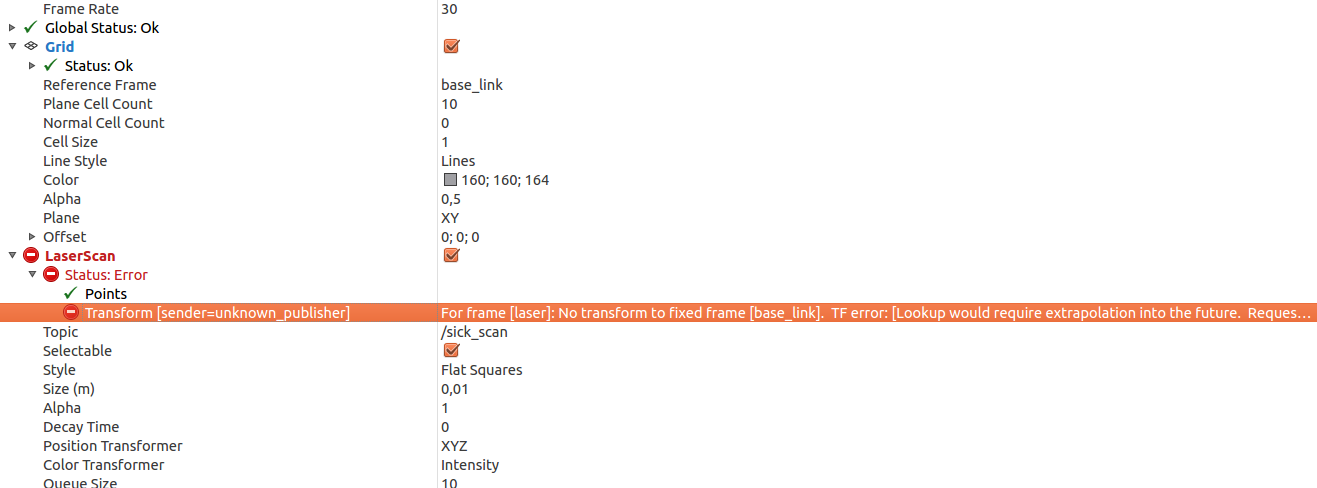
| 2018-05-15 14:47:08 -0500 | marked best answer | Rviz | tf | scan - (No transform to fixed base) Hello all, I'm facing issues with scan data visualization on rviz. The following pictures show the problem:
image 1
image 2 As we can see from image 1, the transformation between the laser and base_link frames is defined, nevertheless rviz does not find this transformation and so can not display the scan data. To be more precisely, the reported message is:
and in sequece
Well, I know that a lot of problems of visualizing data in rviz is related with timestemp and I a read a bunch of topic theads here, in the forum, but I do not realize how to solve this issue. Here goes additional information and pictures:
The command:
and
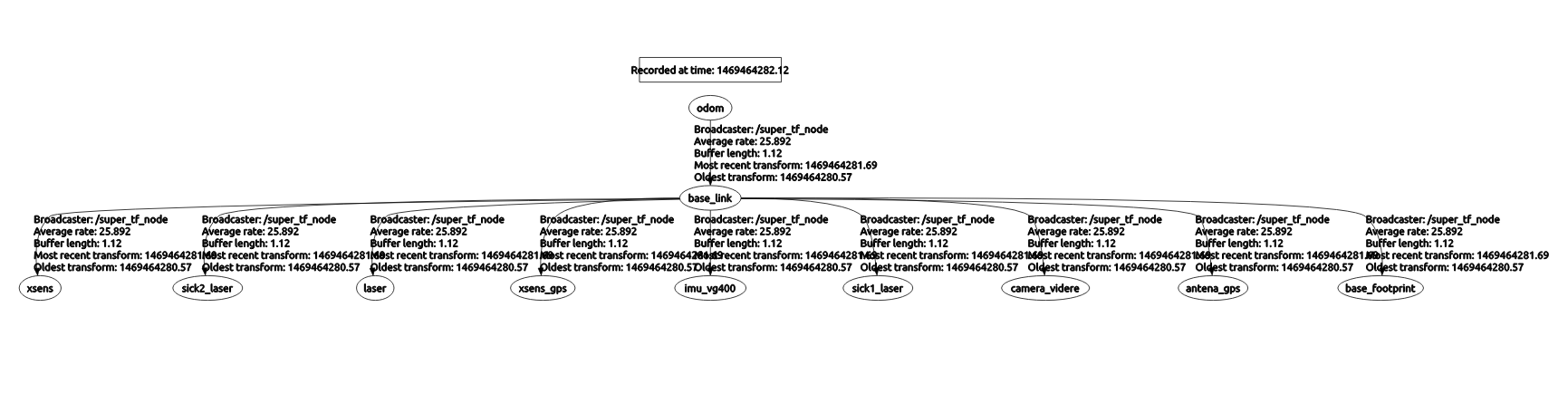
runs without problem. But the command:
return a strange message that is:
as we can see, there is a strange loop behavior in the Chain (first line) The using multiple machines, so maybe there is a problem with synchronization. Any clue to where should I start or to what should I do to resolve this??? Thanks in advance!!! |
| 2018-05-15 14:47:08 -0500 | received badge | ● Teacher (source) |
| 2018-05-15 14:47:08 -0500 | received badge | ● Self-Learner (source) |
| 2018-03-25 12:15:47 -0500 | received badge | ● Famous Question (source) |
| 2018-03-18 23:20:54 -0500 | received badge | ● Famous Question (source) |
| 2018-03-15 00:42:47 -0500 | received badge | ● Famous Question (source) |
| 2018-02-08 02:20:06 -0500 | received badge | ● Notable Question (source) |
| 2017-12-29 10:18:11 -0500 | received badge | ● Famous Question (source) |
| 2017-12-21 14:05:11 -0500 | received badge | ● Notable Question (source) |
| 2017-12-10 16:25:22 -0500 | received badge | ● Popular Question (source) |
| 2017-12-10 06:43:33 -0500 | commented answer | How to properly shutdown a node from command coded in the script of the same node The first option did not work, i.e sys.exit(0). About the second one, what could be this exit sign? |
| 2017-12-10 04:10:11 -0500 | asked a question | How to properly shutdown a node from command coded in the script of the same node How to properly shutdown a node from command coded in the script of the same node I have a simple ros application that i |
| 2017-12-10 04:10:08 -0500 | asked a question | How to properly shutdown a node from command coded in the script of the same node How to properly shutdown a node from command coded in the script of the same node I have a simple ros application that i |
| 2017-12-10 04:09:47 -0500 | asked a question | How to properly shutdown a node from command coded in the script of the same node How to properly shutdown a node from command coded in the script of the same node I have a simple ros application that i |
| 2017-12-06 15:02:28 -0500 | received badge | ● Popular Question (source) |
| 2017-12-06 13:40:23 -0500 | marked best answer | How performe rosrun on joint_state_publisher I have a launch file that launches a URDF based model on gazebo which has flexible joints (not fixed) and launches the robot_state_publisher node. Well, I would like to control this joints through the GUI interface provided by the joint_state_publisher and for this, at first, I tried, after launching the URDF based model, the following command: It did not work and the retrieved error message was: Although I understand the error message I do not know what to do to solve it. I do not know what should be this string. The important of all of this is that I want to initialize the GUI interface to control the flexible joints and I do not know how to do it and any help is welcome. The solution could be via launch file also. ps. 1: The robot description is loaded in the parameter mkz/robot_description ps. 2: The currently launch file is: |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.