The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-08-04 14:14:41 -0500 | received badge | ● Self-Learner (source) |
| 2019-09-12 13:17:37 -0500 | received badge | ● Teacher (source) |
| 2019-09-12 13:17:37 -0500 | received badge | ● Necromancer (source) |
| 2019-02-07 09:52:23 -0500 | received badge | ● Nice Question (source) |
| 2018-08-20 00:54:28 -0500 | received badge | ● Student (source) |
| 2017-05-02 06:44:11 -0500 | commented answer | can hector_slam be used to create 3D models? Hello, ricot. Actually I'm not working on this topic any more. However one of the members in our lab is now using a kind |
| 2016-09-14 14:28:17 -0500 | marked best answer | Using robot_pose_ekf in gazebo simulation Hi everyone, Now, I'm trying to use /robot_pose_ekf to publish the transform from odom -> base_footprint in gazebo simulation. The tf tree tells me that the broadcaster of odom -> base_footprint is /gazebo, but I want it to be /robot_pose_ekf. So I think the point to this question is how to prevent gazebo publishing the transform of odom -> base_footprint and let /robot_pose_ekf send the transform to /tf. Actually, the tf tree shows both /gazebo and /robot_pose_ekf are connected to /tf, while /tf are using the transform of gazebo instead of /robot_pose_ekf, too bad :( Any advice is welcome. Thanks in advance! Clack |
| 2016-09-14 14:25:47 -0500 | received badge | ● Notable Question (source) |
| 2016-09-14 14:25:47 -0500 | received badge | ● Popular Question (source) |
| 2016-07-27 16:36:27 -0500 | received badge | ● Famous Question (source) |
| 2016-07-14 12:49:11 -0500 | received badge | ● Famous Question (source) |
| 2016-07-09 07:27:38 -0500 | commented answer | laser_scan_matcher error! Thanks a lot! |
| 2016-07-09 04:17:16 -0500 | commented answer | Obtaining nav_msgs/Odometry from a laser_scan (eg. with laser_scan_matcher) @mpai227 Many thanks to your code! |
| 2016-06-28 00:20:18 -0500 | commented answer | Error running move_base in navigation stack Hi,steph! I met exactly the same problem as yours. And I don't understand your statement "running move_base and any transform concurrently would cause move_base to crash". Can you explain that to me? Thank you in advance! |
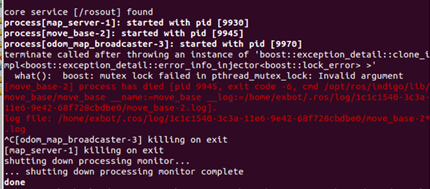
| 2016-06-27 23:34:56 -0500 | asked a question | /move_base died when running rbx1 simulation Hi all, I'm running the fake_move_base in
Chapter 8.2 using ArbotiX simulator. I followed the instruction by typing (all the prerequisites have been fulfilled) and What's more, I checked every related launch files and make sure they are the same with those in the book. Unfortunately, I always got the following error:
Can anyone give me some idea about that? Thanks a lot!! |
| 2016-06-24 08:07:27 -0500 | commented answer | can hector_slam be used to create 3D models? I think so, the standard IMU message type in ROS is 3 dimensional, that is, the node will output 3D points which represents the pose of the IMU. But if you want to use those messages to convert your 2D LIDAR points to 3D, you need to write a new node, which is exactly our group is working at. |
| 2016-06-24 05:31:50 -0500 | commented answer | can hector_slam be used to create 3D models? We recently encountered problems with 3D point clouds distortion caused by IMU and we are looking for papers and other resources to figure out how to fix that. If we had this done we will inform you ASAP :) |
| 2016-06-09 14:26:01 -0500 | received badge | ● Popular Question (source) |
| 2016-06-09 14:26:01 -0500 | received badge | ● Famous Question (source) |
| 2016-06-09 14:26:01 -0500 | received badge | ● Notable Question (source) |
| 2016-05-17 03:39:18 -0500 | received badge | ● Notable Question (source) |
| 2016-05-17 01:22:50 -0500 | received badge | ● Famous Question (source) |
| 2016-05-17 01:22:50 -0500 | received badge | ● Notable Question (source) |
| 2016-04-10 06:11:22 -0500 | commented answer | can hector_slam be used to create 3D models? I mean the 3D point clouds are based on 2D ones obtained by the laser scanner. And IMU data are used to build a transform relationship between 2D and 3D. |
| 2016-04-10 06:07:32 -0500 | commented answer | can hector_slam be used to create 3D models? We've mainly focused on building a 2D SLAM system recently. However one of our teammates planned to convert 2D point cloud to 3D using data obtained by IMU. He will have this done in maybe one month. I will inform you as soon as we have a progress. And we are also curious about your idea :) |
| 2016-03-23 03:31:22 -0500 | commented answer | Localization problem with gmapping and RPLidar Thanks, I'll see to that :) |
| 2016-03-22 18:40:11 -0500 | commented answer | Localization problem with gmapping and RPLidar Thanks to your advice, Icehawk. But we've decided to use a real odometry in our system :) |
| 2016-03-22 18:40:11 -0500 | received badge | ● Commentator |
| 2016-03-22 04:22:18 -0500 | answered a question | Using robot_pose_ekf in gazebo simulation |
| 2016-03-22 03:59:55 -0500 | received badge | ● Popular Question (source) |
| 2016-03-22 02:30:23 -0500 | answered a question | How to stop gazebo publishing tf Thanks to DavidN, my problem is solved :) Now the node /robot_pose_ekf is providing the transform odom -> base_footprint instead of /gazebo. FYI, my modification to |
| 2016-03-22 02:26:13 -0500 | commented answer | How to stop gazebo publishing tf It works! Thank you so much! |
| 2016-03-21 09:15:30 -0500 | commented answer | How to stop gazebo publishing tf Thanks a lot! I'll have a try tomorrow as soon as I get back to my lab :) |
| 2016-03-21 05:26:13 -0500 | commented question | How to stop gazebo publishing tf Thanks to your advice, Mehdi. But actually I have a laser scanner used to provide map -> odom. And my goal is to let robot_pose_ekf provide odom -> base_footprint instead of /gazebo itself. The reason why I stick to this is because I have to check if robot_pose_ekf can be used with GMapping. |
| 2016-03-21 04:29:25 -0500 | asked a question | How to stop gazebo publishing tf Hi, all! Now I'm testing the node /robot_pose_ekf with gazebo simulator. And I have already let /gazebo publish IMU and odometry data to /robot_pose_ekf. Also, /robot_pose_ekf is connected to tf. However, when I checked the tf tree I found that the transform from odom -> base_footprint was provided by /gazebo but I want it to be /robot_pose_ekf. I guess it is because both /gazebo and /robot_pose_ekf are publishing /tf. Hence, I think stopping /gazebo publishing /tf can be a possible solution. FYI, I'm using GMapping which subscribes to /tf to provide SLAM functions. Can anyone tell me how to stop gazebo publishing tf? Or any other solutions to my problem? Thank you in advance! |
| 2016-03-17 08:43:00 -0500 | received badge | ● Popular Question (source) |
| 2016-03-17 06:02:33 -0500 | marked best answer | How to let robot_pose_ekf recieve IMU data from gazebo Hi all, I'm using robot_pose_ekf with gazebo simulator. Now, I've encountered with a problem that the /robot_pose_ekf only takes in /odom while the IMU data is not transferred. To be more detailed, /gazebo published IMU data as topic: /mobile_base/sensors/imu_data [sensor_msgs/Imu]. However, /robot_pose_ekf didn't subscribe this topic, instead it listen to /imu_data which has no publisher! I feel it so strange and cannot understand it at all. Can anyone tell me how to let /robot_pose_ekf subscribe the right topic from /gazebo? FYI, in the launch file of /robot_pose_ekf I tuned "odom_used" "imu_used" to "true" and "vo_used" to "false". Any hints are welcome. Thank you in advance. Clack |
| 2016-03-17 06:02:33 -0500 | received badge | ● Scholar (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.