The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-10-12 00:30:02 -0500 | received badge | ● Taxonomist |
| 2017-10-06 04:52:49 -0500 | received badge | ● Student (source) |
| 2017-05-31 02:12:36 -0500 | received badge | ● Famous Question (source) |
| 2017-04-15 13:47:34 -0500 | received badge | ● Notable Question (source) |
| 2017-02-16 04:25:21 -0500 | received badge | ● Popular Question (source) |
| 2017-02-07 04:48:56 -0500 | commented answer | roscd does not return a specific workspace after sourcing setup.bash I had done all of these steps before, but now following your instructions in your order works. Probably I was forgetting to source |
| 2017-02-07 03:47:49 -0500 | asked a question | roscd does not return a specific workspace after sourcing setup.bash Hi all,
I run ROS Indigo on Ubuntu 14.04, and I have my catkin_ws in a given path. Everything worked perfectly until yesterday.
However, yesterday I tried to set up the Matlab engine to see if it was compatible with ROS. I got some errors for some reasons, but I don't care right now. What bothers me is that now I cannot change directory on my catkin_ws anymore, through So, I tried to create a second workspace, say If useful, I show here the output of
Thank you in advance for whoever can help me to solve this issue. |
| 2017-01-10 04:46:23 -0500 | received badge | ● Famous Question (source) |
| 2016-11-25 05:21:08 -0500 | asked a question | Image subscriber failure Hi everyone, In ROS Kinetic, I defined an image subscriber in separate files as follows: However, it seems that the subscription is not succesfull, because the execution of the program never enters in the callback. Also the output of |
| 2016-06-03 07:25:48 -0500 | received badge | ● Famous Question (source) |
| 2016-03-12 23:51:25 -0500 | received badge | ● Notable Question (source) |
| 2016-01-24 07:29:41 -0500 | received badge | ● Notable Question (source) |
| 2016-01-24 05:50:34 -0500 | commented answer | CMake Error when building NAO packages Yes, that was the issue. It really was a dummy question, sorry. Thanks a lot :) |
| 2016-01-24 05:49:01 -0500 | received badge | ● Supporter (source) |
| 2016-01-24 05:49:00 -0500 | received badge | ● Scholar (source) |
| 2016-01-24 05:48:54 -0500 | received badge | ● Popular Question (source) |
| 2016-01-24 05:48:25 -0500 | received badge | ● Editor (source) |
| 2016-01-23 16:58:20 -0500 | received badge | ● Popular Question (source) |
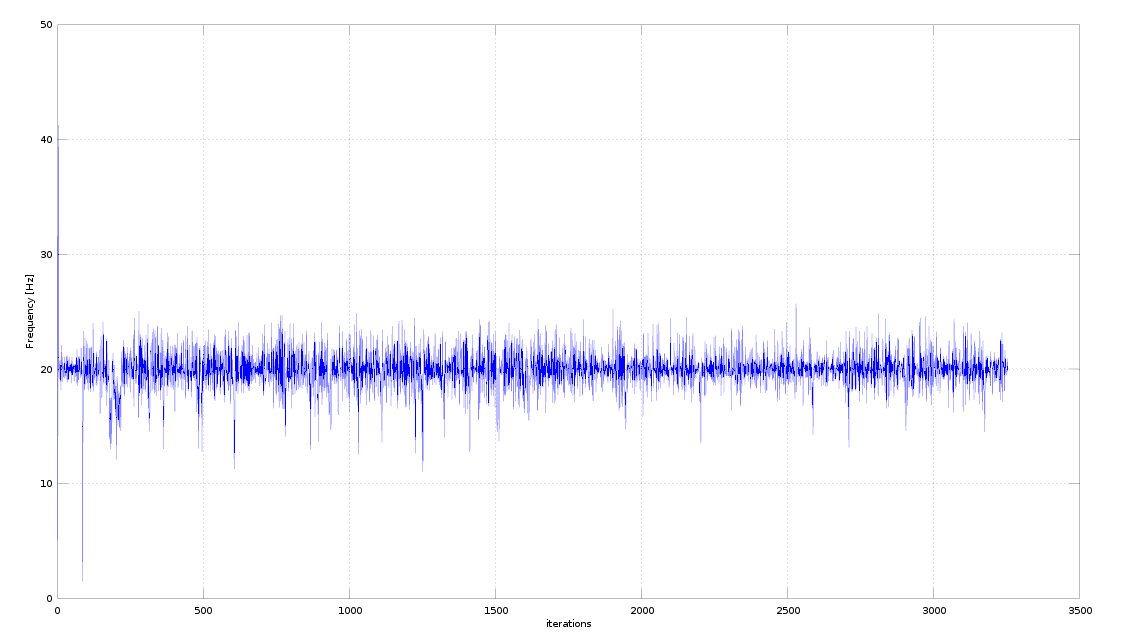
| 2016-01-23 12:50:04 -0500 | asked a question | ROS callback invoked faster than publishing rate Hi all, My ROS node communicates with V-REP on the topic /vrep/visionSensorData to catch images coming from a vision sensor object of the scene. The publishing rate of this topic depends on the simulation time step, that in my scene is set to 50ms, so the publishing rate is 20 Hz. As a further proof of that, I checked this value on my terminal by typing the command rostopic hz /vrep/visionSensorData. In addition, in order to evaluate the processing time of my algorithm, I also measured the actual elapsed time between two consecutive callbacks of the topic, expecting that it was higher than 50ms because of the required time for image processing. Well, my measurements revealed that in some iterations the elapsed time is even lower, resulting into a frequency higher than the claimed publishing rate of 20Hz. I cannot attach a plot of the measured frequency because I have not enough points on this forum. Can anyone explain me why this happens? Do I have to conclude that the publishing rate is not always the same, but it can vary in a fixed range? EDIT 1: I tried to set this option tcpNoDelay() as suggested, but I still measure frequencies higher than 20Hz. My subscriber is an image_transport subscriber, so following the documentation I added this option in the following way (hope it's well written): EDIT 2: yes, actually my measurements are an average of 20 Hz, so they could be consistent with Ah, I forgot to say that I tried to set the parameter
Thanks in advance for your answers |
| 2015-12-16 08:42:12 -0500 | asked a question | CMake Error when building NAO packages Hi, I need to interface NAO with ROS, and I followed the instructions on http://wiki.ros.org/nao/Tutorials/Ins... and http://wiki.ros.org/nao/Tutorials/Ins... . The only difference is that I have the 1.14.5 C++ SDK version of Naoqi, so I didn't install Python bindings. Then, I download the three packages nao_robot, naoqi_bridge and nao_extras, but when I build them I get the following error: Can anyone help me to solve this problem? Thanks |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.