The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-08-04 06:58:09 -0500 | received badge | ● Stellar Question (source) |
| 2021-10-04 13:38:18 -0500 | marked best answer | Can I localize with imprecise/noisy sonar sensor? I have a small differential drive robot with a single sonar sensor mounted on the front of it. I also have an IMU and GPS on the vehicle. My goal is to navigate from one point to another in an unknown environment and avoid obstacles along the way. At the moment we're testing indoors, so the GPS is out of the picture. I want to be able to send a waypoint via rviz (simulating a GPS coordinate waypoint) and have the vehicle navigate there. I don't believe mapping is necessary for my application, however I think localization is - or else how would it know it arrived at its destination? I plan on using robot localization to combine my IMU and odometry sensors and create a pose estimate. But won't that estimate drift over time? Does ROS have any packages that will enable my robot to correct for odometry drift and adjust itself in the map frame, using sonar data? What I've seen used so far is support for LIDAR and LaserScan messages along with gmapping or hector_slam, but I don't have that hardware. |
| 2021-04-06 07:21:21 -0500 | received badge | ● Good Question (source) |
| 2019-07-05 10:10:07 -0500 | received badge | ● Nice Question (source) |
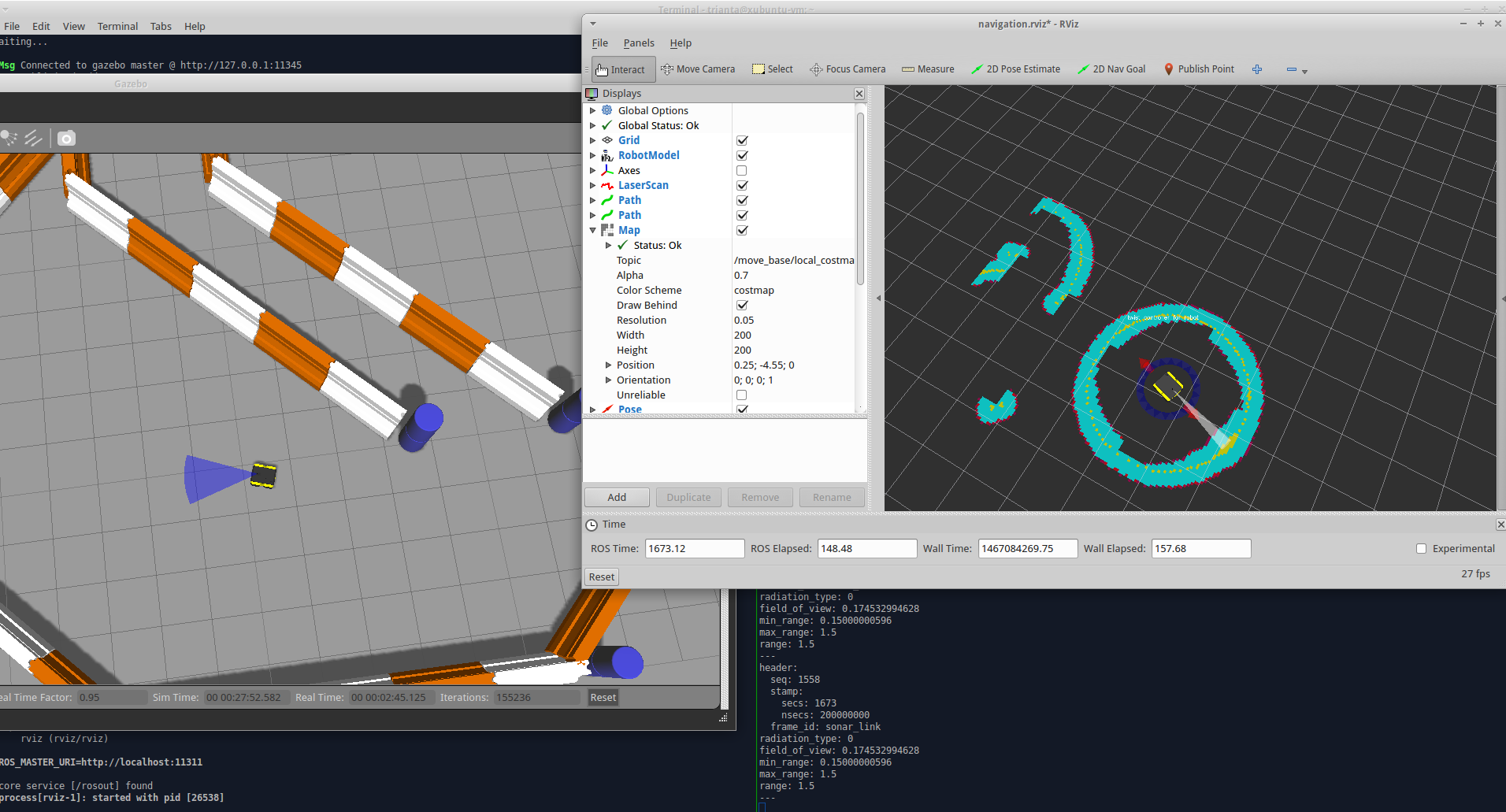
| 2019-06-27 09:06:13 -0500 | marked best answer | range_sensor_layer marks max sonar range as obstacle? I'm using Gazebo to simulate a 4-wheeled differential drive robot. The robot has a forward sonar sensor, so I added a simulated sonar sensor. The sonar sensor appears to work; it detects obstacles and the Range messages look correct (e.g. max range value when no obstacles). The visualization in Gazebo also looks correct. I use the range_sensor_layer package as a plugin for Below is a screenshot of Gazebo (left), Rviz (top right), and the echo'd Range message (bottom right). I rotated the vehicle in a circle without any obstacles, yet the costmap shows that the robot is surrounded by obstacles.
Now there's a parameter in For example, when it's navigating it runs along the wall and starts creating a wall of obstacles. Eventually it decides to turn, and as the range value maxes out, it clears a whole chunk of actual obstacle. Now there's a hole in the wall, so it tries to navigate towards the hole, and relearns that it's indeed an obstacle. This repeats forever. It's both funny and infuriating. Here are the YAML files I'm using for my costmap: costmap_common_params.yamllocal_costmap_params.yamlglobal_costmap_params.yamlIn my robot URDF I include the sonar_sensor macro and instantiate my sonar sensor like so: I'm not sure what's going on here. I'd appreciate any help. |
| 2019-05-21 04:32:46 -0500 | received badge | ● Great Question (source) |
| 2019-05-10 20:28:20 -0500 | received badge | ● Favorite Question (source) |
| 2019-01-01 19:14:38 -0500 | received badge | ● Favorite Question (source) |
| 2018-12-30 00:52:47 -0500 | marked best answer | Confused about coordinate frames. Can someone please explain? I've read:
However I'm still quite confused about the different coordinate frames map, odom, and base_link. Below I'll explain what my current understanding of these frames is, along with some questions. map
odom
base_link
I feel like I partially understand frames and tf. For example if you have sonar sensors mounted on a robot, you may want to know what the sensor value is from the base_link frame instead of the sonar sensor frame. I get that. But the odom and base_link frames confuse me. Can someone please explain what the difference is? |
| 2018-10-04 11:13:28 -0500 | marked best answer | octomap, slam, path planning: how does it all fit together? My goal is to simulate the flight of a UAV in an outdoor environment. My preliminary steps are to see what ROS packages exist which I can reuse, and determine what I need to write myself. I've looked for projects which have overlap with mine:
However I'm still trying to figure out how the following topics fit together:
I'm not sure how they're intertwined, so I have several questions for experts out there: OctoMap
Path Planning
SLAM
|
| 2018-10-04 11:13:25 -0500 | received badge | ● Good Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.