| 2019-07-01 00:33:04 -0500 | received badge | ● Famous Question
(source)
|
| 2019-04-29 12:37:05 -0500 | received badge | ● Taxonomist
|
| 2019-01-12 11:24:20 -0500 | received badge | ● Nice Question
(source)
|
| 2018-02-24 15:34:10 -0500 | received badge | ● Notable Question
(source)
|
| 2018-01-30 21:35:16 -0500 | marked best answer | How to install eband_local_planner? Hi all, I would appreciate it if someone can guide me on how to install eband_local_planner for use with move_base on Hydro because every approach that I have tried so far, has failed. Thanks
I installed eband_local_planner by using the following commands: rosws set eband_local_planner https://github.com/utexas-bwi/eband_local_planner --git
rosws eband_local_planner
roscd eband_local_planner
rosmake
Running the command rospack plugins --attrib=plugin nav_core shows eband_local_planner loaded as a plugin but the eband_local_planner is installed in /home/powerbot67/ros/eband_local_planner/elp_plugin.xml
while the rest of the plugins are installed in /opt/ros/hydro/share. Could this be a problem? powerbot67@powerbot67-desktop:~$ printenv | grep ROS
ROS_ROOT=/opt/ros/hydro/share/ros
ROS_PACKAGE_PATH=/home/powerbot67/ros/sbpl_lattice_planner:/home/powerbot67/ros/eband_local_planner:/home/powerbot67/hydro/sandbox:/opt/ros:/opt/ros/hydro/share:/opt/ros/hydro/stacks
ROS_MASTER_URI=http://localhost:11311
ROS_WORKSPACE=/home/powerbot67/ros
ROSLISP_PACKAGE_DIRECTORIES=
ROS_DISTRO=hydro
ROS_ETC_DIR=/opt/ros/hydro/etc/ros
I changed the move_base.launch file to use eband_local planner as follows: <arg name="base_local_planner" default="eband_local_planner/EBandPlannerROS"/>
However, when I run move_base, I get the following error: [FATAL] [1455878479.341080841]: Failed
to create the
eband_local_planner/EBandPlannerROS
planner, are you sure it is properly
registered and that the containing
library is built? Exception: Could not
find library corresponding to plugin
eband_local_planner/EBandPlannerROS.
Make sure the plugin description XML
file has the correct name of the
library and that the library actually
exists. [move_base-1] process has died
[pid 5295, exit code 1, cmd
/opt/ros/hydro/lib/move_base/move_base
cmd_vel:=/RosAria/cmd_vel
__name:=move_base __log:=/home/powerbot67/.ros/log/e58dae7e-d6f1-11e5-a32e-00026f87bbb1/move_base-1.log].
log file:
/home/powerbot67/.ros/log/e58dae7e-d6f1-11e5-a32e-00026f87bbb1/move_base-1*.log Also, running roswtf gives the following: ERROR Not all paths in ROS_PACKAGE_PATH [/home/powerbot67/ros/sbpl_lattice_planner:/home/powerbot67/ros/eband_local_planner:/home/powerbot67/hydro/sandbox:/opt/ros:/opt/ros/hydro/share:/opt/ros/hydro/stacks] point to an existing directory:
* /home/powerbot67/ros/sbpl_lattice_planner
What should I do to solve this? Thanks |
| 2017-06-20 14:21:05 -0500 | marked best answer | Launch files: How to call rosaria and transforms Hi all, I created a launch file to perform autonomous navigation with the robot. The launch file's contents can be seen below: ###launching rviz###
<node name="rviz" pkg="rviz" type="rviz" />
###start laser###
<node pkg="sicktoolbox_wrapper" type="sicklms" name="sicklms" output="screen">
<param name="port" value="/dev/ttyS1"/>
<param name="inverted" value="true"/>
</node>
###get map###
<node pkg="map_server" type="map_server" name="map_server" args="/home/powerbot67/FacultyGNDFloorMapDan.yaml"/>
###RosAria###
<node pkg="rosaria" type="RosAria" name="RosAria" output="screen" args="/home/powerbot67/catkin_ws/src" >
<param name="port" value="/dev/ttyS0"/>
<param name="DriftFactor" value="-20"/>
<param name="TicksMM" value="115"/>
</node>
</launch>
To launch rosaria and transforms, I usually run the following commands succesfully in 2 separate terminals: cd ~/catkin_ws
source ./devel/setup.bash
rosrun rosaria RosAria _port:=/dev/ttyS0 _DriftFactor:=-20 _TicksMM:=115
cd ~/transform_ws
source ./devel/setup.bash
rosrun transform transform
However, when I try to run rosaria using the launch file mentioned, I get the following error: ERROR: cannot launch node of type
[rosaria/RosAria]: rosaria ROS path
[0]=/opt/ros/hydro/share/ros ROS path
[1]=/home/powerbot67/ros/eband_local_planner
ROS path
[2]=/home/powerbot67/ros/sbpl_lattice_planner
ROS path
[3]=/home/powerbot67/hydro/sandbox ROS
path [4]=/opt/ros ROS path
[5]=/opt/ros/hydro/share ROS path
[6]=/opt/ros/hydro/stacks Any ideas as to why this is happening? How should I call transforms in this launch file? I would appreciate any help. Thanks. |
| 2017-06-20 14:13:23 -0500 | received badge | ● Famous Question
(source)
|
| 2017-06-20 14:13:23 -0500 | received badge | ● Notable Question
(source)
|
| 2017-04-20 14:39:34 -0500 | marked best answer | teb local planner Hi all, Following my other question link: here , I am now trying to install teb_local_planner on ROS Hydro from source. I am not sure on how to install packages from source so I have been following the answer to this question link:here. However, I am getting the following errors: powerbot67@powerbot67-desktop:~$ rosinstall ~/ros /opt/ros/hydro
rosinstall operating on /home/powerbot67/ros from specifications in rosinstall files /opt/ros/hydro
(Over-)Writing /home/powerbot67/ros/.rosinstall
(Over-)Writing setup.sh, setup.bash, and setup.zsh in /home/powerbot67/ros
rosinstall update complete.
Now, type source
/home/powerbot67/ros/setup.bash to
set up your environment. Add that to
the bottom of your ~/.bashrc to set
it up every time. If you are not using bash please see
http://www.ros.org/wiki/rosinstall/No... powerbot67@powerbot67-desktop:~$ echo "source ~/ros/setup.bash">> ~/.bashrc
powerbot67@powerbot67-desktop:~$ roslocate info teb_local_planner > teb_local_planner.rosinstall
Using ROS_DISTRO: hydro
rosinstall ~/ros teb_local_planner.rosinstall
cannot locate information about teb_local_planner
powerbot67@powerbot67-desktop:~$ rosinstall ~/ros teb_local_planner.rosinstall
rosinstall operating on /home/powerbot67/ros from specifications in rosinstall files teb_local_planner.rosinstall
(Over-)Writing /home/powerbot67/ros/.rosinstall
(Over-)Writing setup.sh, setup.bash, and setup.zsh in /home/powerbot67/ros
rosinstall update complete.
Is this the correct way to install teb_local_planner from source on Hydro? Or does this mean that teb_local_planner cannot be installed on Hydro? Thanks always. Update: Tried installing teb_local_planner from source as suggested by @gvdhoorn but I am getting the following errors: powerbot67@powerbot67-desktop:~/catkin_ws/src$ rosdep install --from-paths . --ignore-src --rosdistro=hydro
WARNING: Package "ompl" does not follow the version conventions. It should not contain leading zeros (unless the number is 0).
WARNING: Package "ompl" does not follow the version conventions. It should not contain leading zeros (unless the number is 0).
Executing script below with cwd=/tmp
{{{
#!/bin/bash
if test "x`dpkg-query -W -f='${Package} ${Status} ${Version}\n' libaria-sourcedep`" != 'xlibaria-sourcedep install ok installed 2.8.0-1'; then
echo "libaria-sourcedep not installed"
exit 1
else
exit 0
fi
}}}
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
teb_local_planner: Cannot locate rosdep definition for [costmap_converter]
|
| 2017-03-10 00:00:18 -0500 | received badge | ● Famous Question
(source)
|
| 2016-11-21 12:46:32 -0500 | received badge | ● Famous Question
(source)
|
| 2016-11-13 17:15:49 -0500 | received badge | ● Notable Question
(source)
|
| 2016-10-06 04:50:38 -0500 | received badge | ● Famous Question
(source)
|
| 2016-09-19 15:22:09 -0500 | received badge | ● Famous Question
(source)
|
| 2016-08-09 08:05:13 -0500 | received badge | ● Notable Question
(source)
|
| 2016-08-09 08:05:13 -0500 | received badge | ● Popular Question
(source)
|
| 2016-08-03 04:59:15 -0500 | received badge | ● Famous Question
(source)
|
| 2016-06-25 21:04:57 -0500 | received badge | ● Popular Question
(source)
|
| 2016-05-30 22:25:11 -0500 | received badge | ● Popular Question
(source)
|
| 2016-05-18 05:57:30 -0500 | received badge | ● Popular Question
(source)
|
| 2016-05-18 05:57:30 -0500 | received badge | ● Notable Question
(source)
|
| 2016-05-09 02:06:10 -0500 | received badge | ● Notable Question
(source)
|
| 2016-05-09 02:05:33 -0500 | received badge | ● Famous Question
(source)
|
| 2016-04-20 04:23:54 -0500 | received badge | ● Notable Question
(source)
|
| 2016-04-14 08:03:30 -0500 | commented question | Why is rosaria not outputting velocity comands? The first screenshot is the terminal that runs my navigation launch file. I looks like move_base is not sending commands to RosAria but I don't know why it happens. Could it be because the processor has reached its processing limit? |
| 2016-04-14 08:00:20 -0500 | commented answer | Rosbag record to different path? |
| 2016-04-13 00:30:05 -0500 | received badge | ● Famous Question
(source)
|
| 2016-04-12 20:44:08 -0500 | received badge | ● Notable Question
(source)
|
| 2016-04-12 09:15:17 -0500 | asked a question | Why is rosaria not outputting velocity comands? Hi all, At certain points during the navigation, the robot stops without any apparent reason (the robot's path is not blocked). The terminal outputs the following warnings: 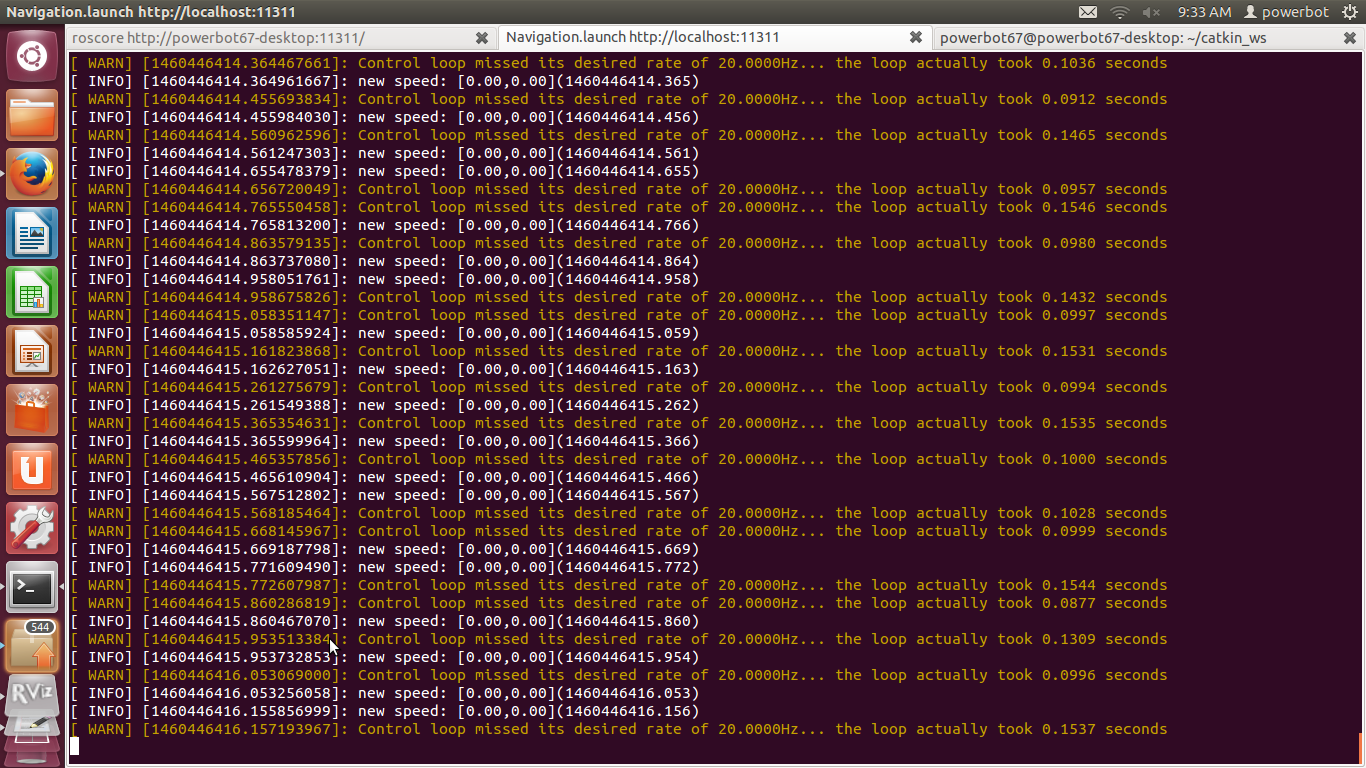
and when I checked the cmd_vel topic I got the following: 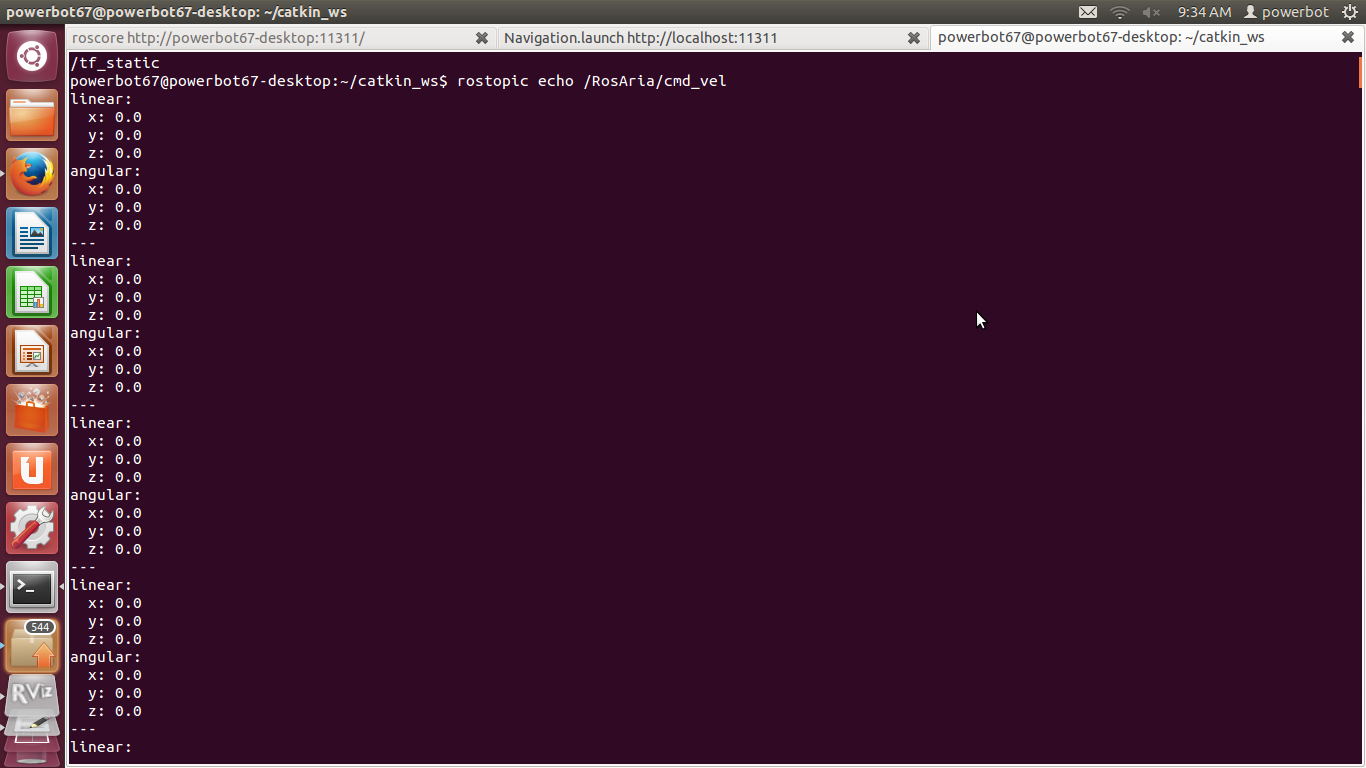
Any ideas as to why this happens? Thanks |
| 2016-04-12 09:10:41 -0500 | asked a question | Rosbag record to different path? Hi all, Is there any way to record rosbag data to a different location than the default location? I am getting the following error: [ERROR] [1460470166.869390414]: Less than 1GB of space free on disk with corridorlocalization_2016-04-12-16-00-06.bag.active. Disabling recording.
[ WARN] [1460470167.370142337]: Not logging message because logging disabled. Most likely cause is a full disk.
Is it possible to record rosbag data to a pen drive? Thanks |
| 2016-03-29 06:53:38 -0500 | asked a question | Movebase: robot move backwards when it detects an obstacle Hi all, What is the parameter that controls how far backwards the robot goes when it detects an obstacle at close proximity? Is it an issue related to the local planner or a setting in move_base? Thanks TrajectoryPlannerROS:
# Robot Configuration Parameters
acc_lim_x: 0.35 #was 0.5
acc_lim_y: 0.35 #was 0.5
acc_lim_theta: 0.35 #was 0.5
max_vel_x: 0.35 #was 0.5
min_vel_x: 0.05
max_vel_theta: 1.0
min_in_place_vel_theta: 0.05 #was0.4
escape_vel: -0.06
holonomic_robot: false
# Goal Tolerance Parameters
xy_goal_tolerance: 0.1 #was 0.3
yaw_goal_tolerance: 0.1 #was 0.3 lower means harder to achieve
latch_xy_goal_tolerance: false
path_distance_bias: 20.0 #default 0.6 - wasn't used - see pdist_scale
goal_distance_bias: 0.8 #default 0.8 - wasn't used - see gdist_scale
# Forward Simulation Parameters
sim_time: 10.0
sim_granularity: 0.025
vx_samples: 5
vtheta_samples: 20
controller_frequency: 20.0 #has to be the same as in move_base.launch
# Trajectory Scoring Parameters
meter_scoring: true
pdist_scale: 0.8
gdist_scale: 0.6
occdist_scale: 0.10 #was 0.01
heading_lookahead: 0.325 - was default
heading_scoring: false
dwa: false
global_frame_id: odom
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.05
<launch>
<master auto="start"/> <arg name="no_static_map" default="false"/> <arg name="base_global_planner" default="navfn/NavfnROS"/>
<arg name="base_local_planner" default="base_local_planner/TrajectoryPlannerROS"/> <node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/costmap_common_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/costmap_common_params.yaml" command="load" ns="local_costmap"/> <rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/local_costmap_params.yaml" command="load" />
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/global_costmap_params.yaml" command="load" />
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/base_local_planner_params.yaml" command="load" />
<param name="base_global_planner" value="$(arg base_global_planner)"/>
<param name="base_local_planner" value="$(arg base_local_planner)"/>
<param name="recovery_behavior_enabled" value="true"/>
<param name="recovery_behaviour_enabled" value="true"/>
<param name="clearing_rotation_allowed" value="true"/>
<param name="controller_frequency" value="20.0"/>
<param name="planner_patience" value="5.0"/>
<param name="planner_frequency" value="0.0"/>
<param name="controller_patience" value="15.0"/>
<!--<param name="oscillation_timeout" value="40"/> -->
<!-- Remap into namespace for cmd_vel_mux switching-->
<remap from="cmd_vel" to="/RosAria/cmd_vel" />
</node>
</launch> |
| 2016-03-29 06:01:49 -0500 | commented question | Move_base: Why is the robot still using recovery behaviors if they are turned off? @spmaniato do you mean inserting recovery_behaviors:false in the move_base launch file? |
| 2016-03-28 01:53:59 -0500 | commented question | Move_base: Why is the robot still using recovery behaviors if they are turned off? @spmaniato I edited the question to include move_base.launch |
| 2016-03-28 01:53:15 -0500 | received badge | ● Associate Editor
(source)
|
| 2016-03-28 01:50:52 -0500 | commented question | Move_base: Why is the robot still using recovery behaviors if they are turned off? rosparam get shows the parameters set correctly : powerbot67@powerbot67-desktop:~/catkin_ws$ rosparam get /move_base/recovery_behavior_enabled
false
powerbot67@powerbot67-desktop:~/catkin_ws$ rosparam get /move_base/clearing_rotation_allowed
false |
| 2016-03-27 20:45:57 -0500 | received badge | ● Notable Question
(source)
|
| 2016-03-24 13:18:21 -0500 | commented question | Move_base: Why is the robot still using recovery behaviors if they are turned off? Thanks for your reply @Mehdi. No, I am not running either of catkin_make or catkin_make install. Is this always required after changing a parameter? I was only pressing 'save' after changing parameters in the launch file. I assumed that this is enough to affect a change in parameter. Thanks again |
| 2016-03-24 09:34:39 -0500 | received badge | ● Popular Question
(source)
|
| 2016-03-24 03:51:48 -0500 | received badge | ● Popular Question
(source)
|
| 2016-03-24 02:29:39 -0500 | commented answer | Move_base: Why is the global costmap different? Thanks, I'll check that out although the displayed items should be the same in both cases. In the top view the map's outline is not showing clearly but the map still seems to be there... |
| 2016-03-23 16:49:33 -0500 | commented question | Move_base: Why is the robot still using recovery behaviors if they are turned off? I will check it out. Thanks! |
| 2016-03-23 16:06:51 -0500 | commented answer | Navfn plans path through obstacle? Thanks for your reply. The obstacle was present when the global planner calculated the global path. The red arm of baselink is nearly touching the obstacle which is a vertical noticeboard on a stand that is taller than an average human. |
| 2016-03-23 16:04:31 -0500 | asked a question | Move_base: Why is the robot still using recovery behaviors if they are turned off? Hi all, The current move_base launch file that I am using has the following parameters set as follows: <param name="recovery_behavior_enabled" value="false"/>
<param name="clearing_rotation_allowed" value="false"/>
The wiki page for move_base http://wiki.ros.org/move_base states the following: These recovery behaviors can be
configured using the
recovery_behaviors parameter, and
disabled using the
recovery_behavior_enabled parameter. So why does the robot still perform clearing rotations if the related parameters are disabled? Thanks move_base launch file: <launch>
<master auto="start"/>
<arg name="no_static_map" default="false"/>
<arg name="base_global_planner" default="navfn/NavfnROS"/>
<!--<arg name="base_global_planner" default="carrot_planner/CarrotPlanner"/>-->
<arg name="base_local_planner" default="base_local_planner/TrajectoryPlannerROS"/>
<!--<arg name="base_local_planner" default="dwa_local_planner/DWAPlannerROS"/>-->
<!--<arg name="base_local_planner" default="eband_local_planner/EBandPlannerROS"/>-->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/local_costmap_params.yaml" command="load" />
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/global_costmap_params.yaml" command="load" />
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/base_local_planner_params.yaml" command="load" />
<param name="base_global_planner" value="$(arg base_global_planner)"/>
<param name="base_local_planner" value="$(arg base_local_planner)"/>
<param name="recovery_behavior_enabled" value="false"/>
<param name="recovery_behaviour_enabled" value="false"/>
<param name="clearing_rotation_allowed" value="false"/>
<param name="planner_frequency" value="40.0"/>
<!--<param name="controller_frequency" value="10.0"/> -->
<!--<param name="planner_patience" value="40.0"/> -->
<!--<param name="controller_patience" value="40.0"/> -->
<!--<param name="oscillation_timeout" value="40"/> -->
<!-- Remap into namespace for cmd_vel_mux switching-->
<remap from="cmd_vel" to="/RosAria/cmd_vel" />
</node>
</launch>
|

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.