| 2021-10-11 23:18:36 -0500 | marked best answer | How to control kinect NUI Motor? hello, i want to control my motor and change the direction of it. how can i doing it?
i've tried this one. but it doesn't work. i failed compile it, and failed run the .exe program. said that KinectMotor.cpp:2:19: fatal error: XnUSB.h: No such file or directory
#include <xnusb.h> so, is there any option to do it with ROS? i've heard there's something called kinect_aux package.
but, i don't have those package in openni_launch or openn_camera or libfreenect or blabla.
where can i find it? Thank's for help ! |
| 2021-10-11 23:18:36 -0500 | received badge | ● Teacher
(source)
|
| 2021-10-11 23:18:36 -0500 | received badge | ● Self-Learner
(source)
|
| 2020-02-11 07:21:20 -0500 | received badge | ● Famous Question
(source)
|
| 2020-02-11 07:21:20 -0500 | received badge | ● Notable Question
(source)
|
| 2020-01-01 16:58:55 -0500 | received badge | ● Famous Question
(source)
|
| 2017-04-20 14:22:38 -0500 | marked best answer | openni_launch for kinect xbox 360 -1414 so,... i don't know what going on..
i'm using Kinect xbox 360, model 1414.
i've succeed run the example of nite (nite/NITE-Bin-Dev-Linux-x64-v1.5.2.23/Samples/Bin), but, i tried connected it with ros roslaunch openni_launch openni.launch, it shown up: process[camera_base_link2-23]: started with pid [15373]
process[camera_base_link3-24]: started with pid [15374]
terminate called after throwing an instance of 'openni_wrapper::OpenNIException'
what(): unsigned int openni_wrapper::OpenNIDriver::updateDeviceList() @ /home/adelleodel/ros/src/openni_camera/src/openni_driver.cpp @ 125 : enumerating image nodes failed. Reason: One or more of the following nodes could not be enumerated:
Device: PrimeSense/SensorV2/5.1.0.41: The device is not connected!
Image: PrimeSense/SensorKinect/5.1.2.1: Failed to set USB interface!
Device: PrimeSense/SensorV2/5.1.0.41: The device is not connected!
[FATAL] [1454896895.994153086]: Service call failed!
[FATAL] [1454896895.994256906]: Service call failed!
[FATAL] [1454896895.994619240]: Service call failed!
there's some driver for primesense... and i just download it all. am i wrong to install all of it?
seems that my driver doesn't fit. and i wonder so why i can run my example then? '-' |
| 2017-04-19 16:05:05 -0500 | marked best answer | fixed frame for rviz doesn't change I wonder why i can't setup my own frame which i named my own frame by name "my_frame" in my tracker_params2.yaml command_rate: 0.5
tracking_rate: 10
base_controller_rate: 20
joint_controller_rate: 20
default_joint_speed: 2.0
max_drive_speed: 0.5
max_rotation_speed: 0.5
base_control_side: right
use_real_robot: False
# Use these values for a typical non-holonomic robot.
scale_drive_speed: 1.0
scale_rotation_speed: 1.0
reverse_rotation: False
holonomic: False
# Use the following scale factors for the Rovio.
#scale_drive_speed: 4.0
#scale_rotation_speed: 0.4
#reverse_rotation: True
#holonomic: True
#fixed_frame: openni_depth_frame
fixed_frame: my_frame
skel_to_joint_map: {
head: head_pan_joint,
neck: head_tilt_joint,
torso: torso_joint,
left_shoulder: left_shoulder_lift_joint,
left_elbow: left_elbow_joint,
left_hand: left_hand_joint,
right_shoulder: right_shoulder_joint,
right_elbow: right_elbow_joint,
right_hand: right_hand_joint,
left_hip: hip_left_yaw,
left_knee: knee_left_pitch,
left_foot: ankle_left_roll,
right_hip: hip_right_yaw,
right_knee: knee_right_pitch,
right_foot: ankle_right_roll
}
the ros itself has recognize "my_frame" such in this image:
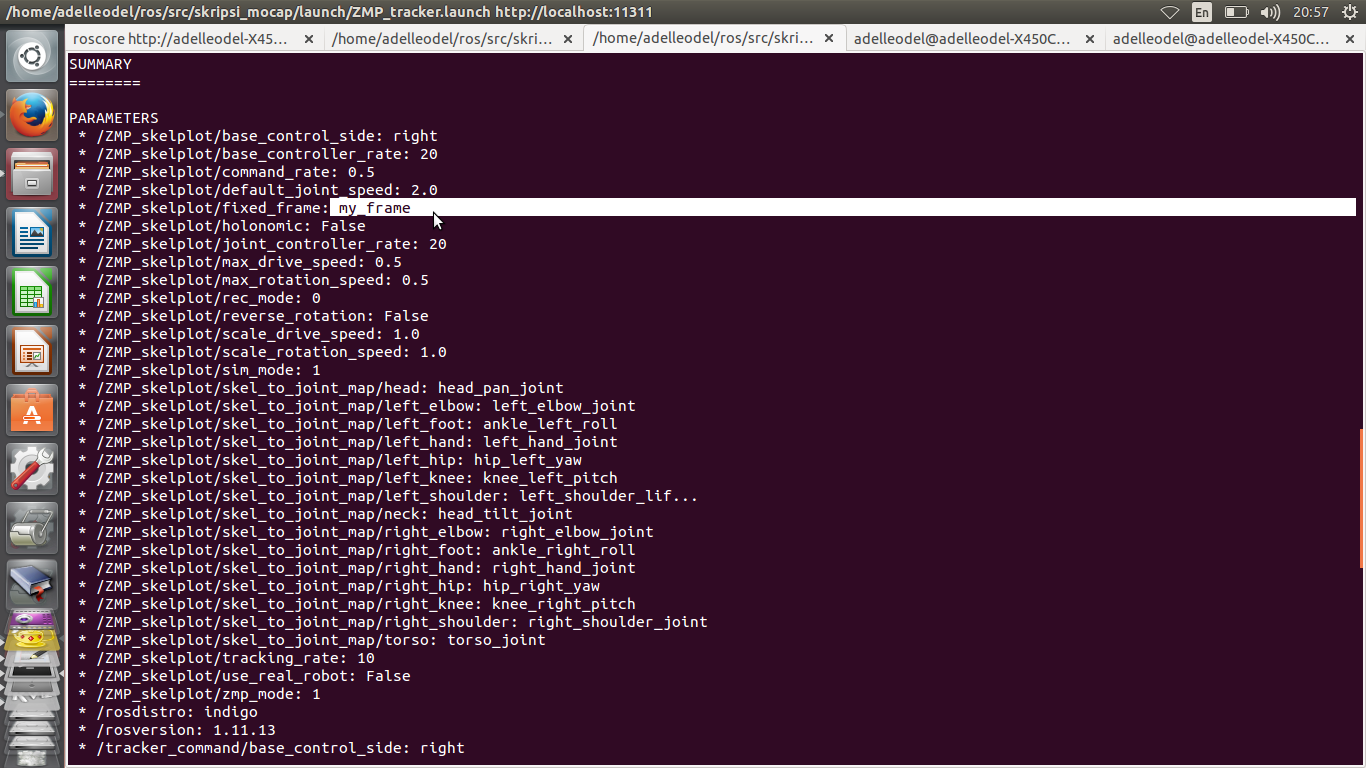 but when i want to called it in rviz, it won't show anything like this:
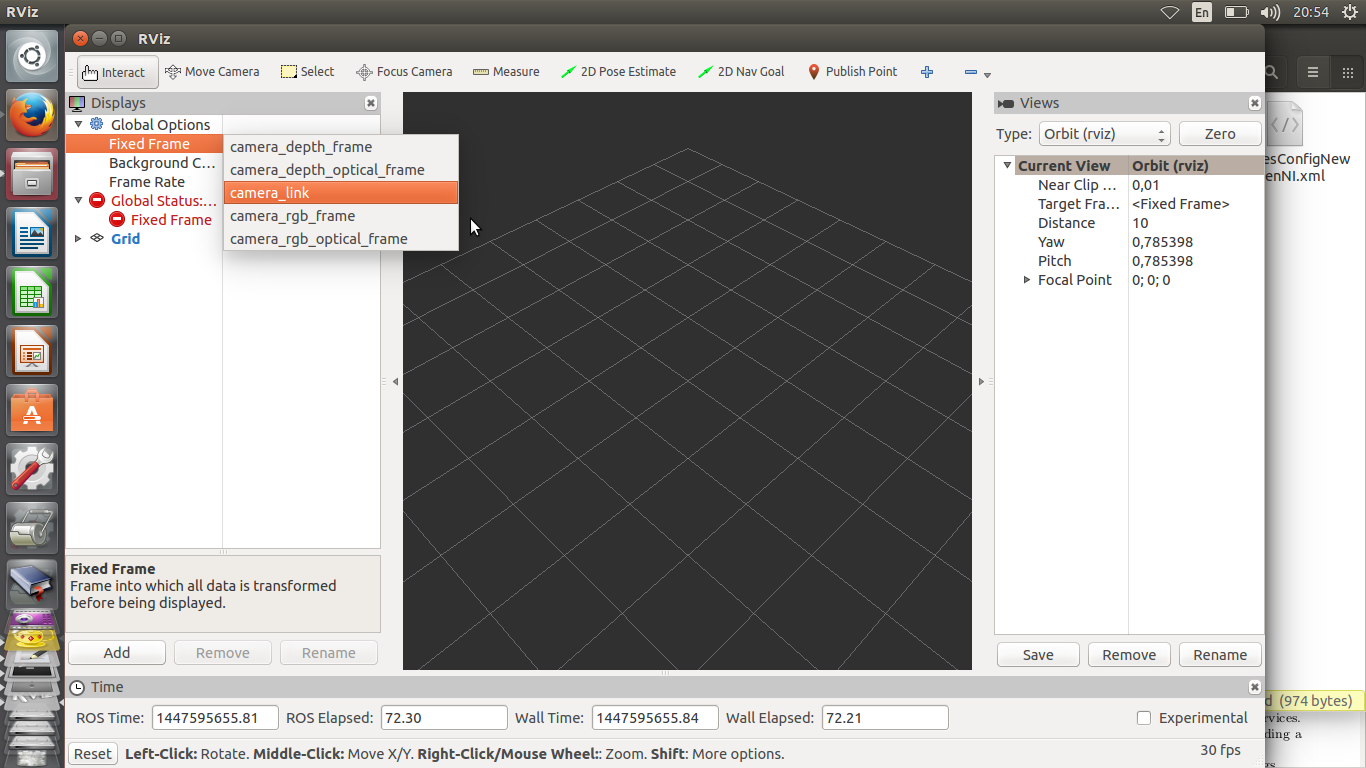 how to set my fixed frame to "my_frame" then? |
| 2017-02-04 09:32:56 -0500 | received badge | ● Famous Question
(source)
|
| 2016-12-29 08:57:14 -0500 | received badge | ● Famous Question
(source)
|
| 2016-12-12 03:32:31 -0500 | received badge | ● Famous Question
(source)
|
| 2016-10-26 11:41:32 -0500 | received badge | ● Notable Question
(source)
|
| 2016-10-20 16:05:35 -0500 | received badge | ● Popular Question
(source)
|
| 2016-10-20 16:05:35 -0500 | received badge | ● Notable Question
(source)
|
| 2016-09-04 17:24:05 -0500 | received badge | ● Notable Question
(source)
|
| 2016-08-22 20:55:08 -0500 | received badge | ● Famous Question
(source)
|
| 2016-08-22 20:55:08 -0500 | received badge | ● Notable Question
(source)
|
| 2016-08-22 20:55:08 -0500 | received badge | ● Popular Question
(source)
|
| 2016-07-19 06:21:51 -0500 | received badge | ● Famous Question
(source)
|
| 2016-07-10 11:24:50 -0500 | marked best answer | kdl or orocos_kdl from electric to indigo hi there, i'm new to ros. my friend has ros files with ros-electric structure and now i want to use it with indigo.. and now i have problem with kdl or orocos_kdl (everytime i search about kdl on google, it always shown orocos-kdl, so i thought today they called it orocos_kdl. am i wrong?). after i following ros-tutorial rosbuild to catkin, i try to catkin_make, and this is the result CMake Error at /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:75 (find_package):
Could not find a package configuration file provided by "orocos_kdl" with
any of the following names:
orocos_kdlConfig.cmake
orocos_kdl-config.cmake
Add the installation prefix of "orocos_kdl" to CMAKE_PREFIX_PATH or set
"orocos_kdl_DIR" to a directory containing one of the above files. If
"orocos_kdl" provides a separate development package or SDK, be sure it has
been installed.
Call Stack (most recent call first):
skripsi_mocap/CMakeLists.txt:7 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/adelleodel/rosadel/build/CMakeFiles/CMakeOutput.log".
See also "/home/adelleodel/rosadel/build/CMakeFiles/CMakeError.log".
make: *** [cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed
anyway, the orocos_kdl was write down for kdl before. because i thought it's a call-name failure so i changed it to orocos_kdl on CMakeList and package.xml. so i don't know if my decision is right enough or not. i'm following this link: linking-against-kdl-ros-hydro. and this is my CMakeList :
find_package(catkin REQUIRED COMPONENTS
...
orocos_kdl
..
) ....
find_library(orocos_kdl_LIBRARY NAMES ${orocos_kdl_LIBRARIES} PATHS
${orocos_kdl_LIBRARY_DIRS} NO_DEFAULT_PATH)
set(orocos_kdl_LIBRARIES ${orocos_kdl_LIBRARY})
....
catkin_package(DEPENDS orocos_kdl)
please help me.. :" |
| 2016-07-01 02:06:30 -0500 | received badge | ● Famous Question
(source)
|
| 2016-06-28 19:53:39 -0500 | received badge | ● Popular Question
(source)
|
| 2016-06-25 13:47:23 -0500 | received badge | ● Popular Question
(source)
|
| 2016-06-05 12:05:39 -0500 | received badge | ● Famous Question
(source)
|
| 2016-06-04 19:43:02 -0500 | commented answer | roslaunch error - "ERROR: cannot launch node of type" this problem similar to mine,.. but in my case, i can launch other launcher in my package. just one package that has this kind of error. can you help? should i remake the package too? |
| 2016-06-04 07:09:59 -0500 | commented answer | rosserial lost sync with device how often spinOnce() that you mean?..
i gor confused with delay, rate in python and that spinOnce()..
i just called spinOnce() in my loop like this: void loop(){
nh.spinOnce();
delay(1);
}
is it not right? |
| 2016-06-02 17:42:43 -0500 | commented answer | [ERROR] [WallTime: 1448195093.843222] Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino @karthikeya, it has default baudrate 57600, and it was success connected at first, but in the middle time when i move my servo, sometimes it suddenly break the connection. so i guess the rate is being too high, i want to change it a bit slower like 9600.. er, thanks for your response earlier anyway |
| 2016-06-02 09:23:34 -0500 | commented answer | [ERROR] [WallTime: 1448195093.843222] Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino hey, how do you know setting of baudrate in Arduino? in my case when i follow these tutorial, i don't see any baudrate set. how do you know which baudrate of your arduino then? |
| 2016-05-27 19:11:11 -0500 | asked a question | rosserial arduino for my program hello there, i'm usually just launch program in ROS and a bit editing for the algoritm itself in the program.
right now, i want to make my owm program.
i'm using ROS Indigo in Ubuntu 14.04.3 my case is tracking people with kinect and then send serial to arduino which is going to moving the servos (hobby servos) i have done the tracking thing with kinect (from someone package like skeleton markers of pi robot in here)
and trying servo control from ROS tutorial in here the tutorial itself just send message in one packet to move the servos.
i would like to make message from my program with kinect which will send the information to arduino.
as far as i know i can send the message from rosserial_python called the serial_node.py.
all i know, i have to: 1. launch my tracking program (get data)
2. run rosserial_python (to connect arduino)
3. send the data to the connection **(i missed in here)**
how to connect it all then?
what step should i take, which tutorial should i try?
thank's a bunch for replying. :) |
| 2016-05-26 09:07:25 -0500 | commented answer | ros servo control arduino fails external power supply for arduino or motor? |
| 2016-05-26 04:51:15 -0500 | commented question | how to interface a servo motor with an arduino mega2560 using ros ? what do u mean not enough power? how do you powering it before? |
| 2016-05-25 19:26:05 -0500 | asked a question | HandTracker Kinect Ros Indigo Hi there, i'm using ROS Indigo in Ubuntu 14.04.3 i was using skeleton_tracker for my project with kinect before, but this time i just want to get the hand point from kinect. Do u guys know which package should i use from ROS for this hand tracking with kinect with Indigo?
i've tried this tutorial from mit. the list of tutorial is not for indigo yet.
So i tried install in Electric's package. after following the instruction in here. i got error while svn list https://svn.csail.mit.edu/
the response was svn: E175011: Unable to connect to a repository at URL 'https://svn.csail.mit.edu'
svn: E175011: Repository moved temporarily to 'https://svn.csail.mit.edu:1443/admin/admin.cgi'; please relocate
so does when i try step 7 rosinstall ~/ros_workspace/kinect_demos /opt/ros/electric ~/ros_workspace/kinect_demos.rosinstall
with ros_workspace is my own workspace for ros and i change /opt/ros/electric to /opt/ros/indigo unknown url type: /root/ros/kinect_demos.rosinstall
what should i do then? |
| 2016-05-25 19:17:01 -0500 | commented answer | roslaunch dynamixel hi, thanks for replying. i had solved the problem just as you said :) |
| 2016-05-25 19:16:27 -0500 | marked best answer | roslaunch dynamixel Hi again, here i'm still got problem changing my friend's ros-files electric structure and i want to changed it to indigo.
i've download and install the dynamixel driver by sudo apt-get install ros-indigo-dynamixel-controllers ros-indigo-dynamixel-driver ros-indigo-dynamixel-msgs ros-indigo-dynamixel-motor and connect RS232 (for TTL) to AX12+.
Now i got this error when i write roslaunch <my_package> ZMP_dynamixel.launch: core service [/rosout] found
process[dynamixel_controller/dynamixel_manager-1]: started with pid [7803]
process[dynamixel_controller/dynamixel_controller_spawner_ax12-2]: started with pid [7804]
[INFO] [WallTime: 1446118639.239715] dynamixel_ax12 controller_spawner: waiting for controller_manager skripsi_dynamixel to startup in /dynamixel_controller/ namespace...
Traceback (most recent call last):
File "/opt/ros/indigo/lib/dynamixel_controllers/controller_manager.py", line 245, in <module>
manager = ControllerManager()
File "/opt/ros/indigo/lib/dynamixel_controllers/controller_manager.py", line 102, in __init__
serial_proxy.connect()
File "/opt/ros/indigo/lib/python2.7/dist-packages/dynamixel_driver/dynamixel_serial_proxy.py", line 97, in connect
self.dxl_io = dynamixel_io.DynamixelIO(self.port_name, self.baud_rate)
File "/opt/ros/indigo/lib/python2.7/dist-packages/dynamixel_driver/dynamixel_io.py", line 67, in __init__
self.ser = serial.Serial(port)
File "/usr/lib/python2.7/dist-packages/serial/serialutil.py", line 261, in __init__
self.open()
File "/usr/lib/python2.7/dist-packages/serial/serialposix.py", line 278, in open
raise SerialException("could not open port %s: %s" % (self._port, msg))
serial.serialutil.SerialException: could not open port /dev/ttyUSB0: [Errno 13] Permission denied: '/dev/ttyUSB0'
================================================================================REQUIRED process [dynamixel_controller/dynamixel_manager-1] has died!
process has died [pid 7803, exit code 1, cmd /opt/ros/indigo/lib/dynamixel_controllers/controller_manager.py __name:=dynamixel_manager __log:=/home/adelleodel/.ros/log/8c82747c-7e1d-11e5-bae6-240a6416fc2f/dynamixel_controller-dynamixel_manager-1.log].
log file: /home/adelleodel/.ros/log/8c82747c-7e1d-11e5-bae6-240a6416fc2f/dynamixel_controller-dynamixel_manager-1*.log
Initiating shutdown!
================================================================================
[dynamixel_controller/dynamixel_controller_spawner_ax12-2] killing on exit
[dynamixel_controller/dynamixel_manager-1] killing on exit
what should i do now? |
| 2016-05-25 06:35:19 -0500 | asked a question | Unable to sync with device hello, i've tried this tutorial but when i rosrun rosserial_python serial_node.py /dev/ttyACM1 or rosrun rosserial_python serial_node.py _port:=/dev/ttyACM1 (my port is ttyACM1), the result is [INFO] [WallTime: 1464200241.928070] ROS Serial Python Node
[INFO] [WallTime: 1464200241.933151] Connecting to /dev/ttyACM1 at 9600 baud
[ERROR] [WallTime: 1464200259.039163] Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
i'm sure that my rosserial is in indigo and i've tried installed again following this tutorial. the result still the same.
though, i remember, a few weeks before, i've tried rosserial with HelloWorld and it was successful.
so i really wonder why right know i got this kind of error '-'
Help Please!! anyway, i'm using Ubuntu 14.04.1 with ROS Indigo |
| 2016-05-25 06:12:10 -0500 | commented answer | Unable to sync with device (arduino uno) i've tried this, but still got that error.. should i remove the package first before reinstall the new one? because i just replaced the direc of rosserial from <ws>/src/ to somewhere. |
| 2016-05-08 23:56:42 -0500 | received badge | ● Famous Question
(source)
|
| 2016-05-07 11:30:32 -0500 | received badge | ● Famous Question
(source)
|
| 2016-04-25 00:55:32 -0500 | marked best answer | failed to install ros-indigo-freenect-launch hello, i'm using Ubunti 14.04 LTS, before i installed sudo apt-get install ros-indigo-freenect-launch, it worked succesfuly. but i think after i uninstall some file with sudo apt-get remove <my package> which <my package=""> is the word that include openni and freenect in it. After that, i restart and try to install the package again <ros-indigo-freenect-launch>, it said that : Err http://packages.ros.org/ros/ubuntu/ trusty/main ros-indigo-camera-calibration-parsers amd64 1.11.7-0trusty-20150729-0024-+0000
Could not connect to packages.ros.org:80 (140.211.166.134), connection timed out
Err http://packages.ros.org/ros/ubuntu/ trusty/main ros-indigo-camera-info-manager amd64 1.11.7-0trusty-20150729-0102-+0000
Unable to connect to packages.ros.org:http:
Err http://packages.ros.org/ros/ubuntu/ trusty/main ros-indigo-depth-image-proc amd64 1.12.14-0trusty-20150806-2000-+0000
Unable to connect to packages.ros.org:http:
Err http://packages.ros.org/ros/ubuntu/ trusty/main ros-indigo-image-proc amd64 1.12.14-0trusty-20150806-1958-+0000
Unable to connect to packages.ros.org:http:
E: Failed to fetch http://packages.ros.org/ros/ubuntu/pool/main/r/ros-indigo-camera-calibration-parsers/ros-indigo-camera-calibration-parsers_1.11.7-0trusty-20150729-0024-+0000_amd64.deb Could not connect to packages.ros.org:80 (140.211.166.134), connection timed out
E: Failed to fetch http://packages.ros.org/ros/ubuntu/pool/main/r/ros-indigo-camera-info-manager/ros-indigo-camera-info-manager_1.11.7-0trusty-20150729-0102-+0000_amd64.deb Unable to connect to packages.ros.org:http:
E: Failed to fetch http://packages.ros.org/ros/ubuntu/pool/main/r/ros-indigo-depth-image-proc/ros-indigo-depth-image-proc_1.12.14-0trusty-20150806-2000-+0000_amd64.deb Unable to connect to packages.ros.org:http:
E: Failed to fetch http://packages.ros.org/ros/ubuntu/pool/main/r/ros-indigo-image-proc/ros-indigo-image-proc_1.12.14-0trusty-20150806-1958-+0000_amd64.deb Unable to connect to packages.ros.org:http:
so, what's wrong with my system? |
| 2016-04-24 11:56:58 -0500 | marked best answer | [skeleton.launch] is neither a launch file in package [skeleton_markers] nor is [skeleton_markers] a launch file Hello, i had this strange error. a few days ago, i've succeed catkin_make and roslaunch skeleton_markers skeleton.launch . so the program successfully running. But, because of i have some error code for my other package on my workspace, someone said that i have to delete the 'build' folder in my workspace and re build my package, but i accidentally delete (with SHIFT+DEL) my install folder (which is source of my install/setup.bash). --this is my stupid accident--
after that, i remake my install folder by catkin_make install in my workspace folder with source in my devel/setup.bash and rebuild with catkin_make, and change again my source to install/setup.bash, and rebuild again with catkin_make. but still, the result is said that : [skeleton.launch] is neither a launch file in package [skeleton_markers] nor is [skeleton_markers] a launch file
i've done re-package my package folder by catkin_create-pkg, but the result still same. i don't know anymore what i have to do with this. please help me :"( oh, and it's not only that package which have error, but i think all my package inside my workspace can't be launched :(
i can find my rospackage with rospack find <package> |
| 2016-04-13 04:28:13 -0500 | received badge | ● Famous Question
(source)
|
| 2016-04-11 10:30:13 -0500 | received badge | ● Popular Question
(source)
|
| 2016-04-11 10:30:13 -0500 | received badge | ● Famous Question
(source)
|

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.