The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-12-23 10:25:52 -0500 | received badge | ● Taxonomist |
| 2021-11-26 06:19:08 -0500 | received badge | ● Famous Question (source) |
| 2021-11-26 06:19:08 -0500 | received badge | ● Notable Question (source) |
| 2019-07-10 01:52:11 -0500 | received badge | ● Popular Question (source) |
| 2019-07-10 01:52:11 -0500 | received badge | ● Notable Question (source) |
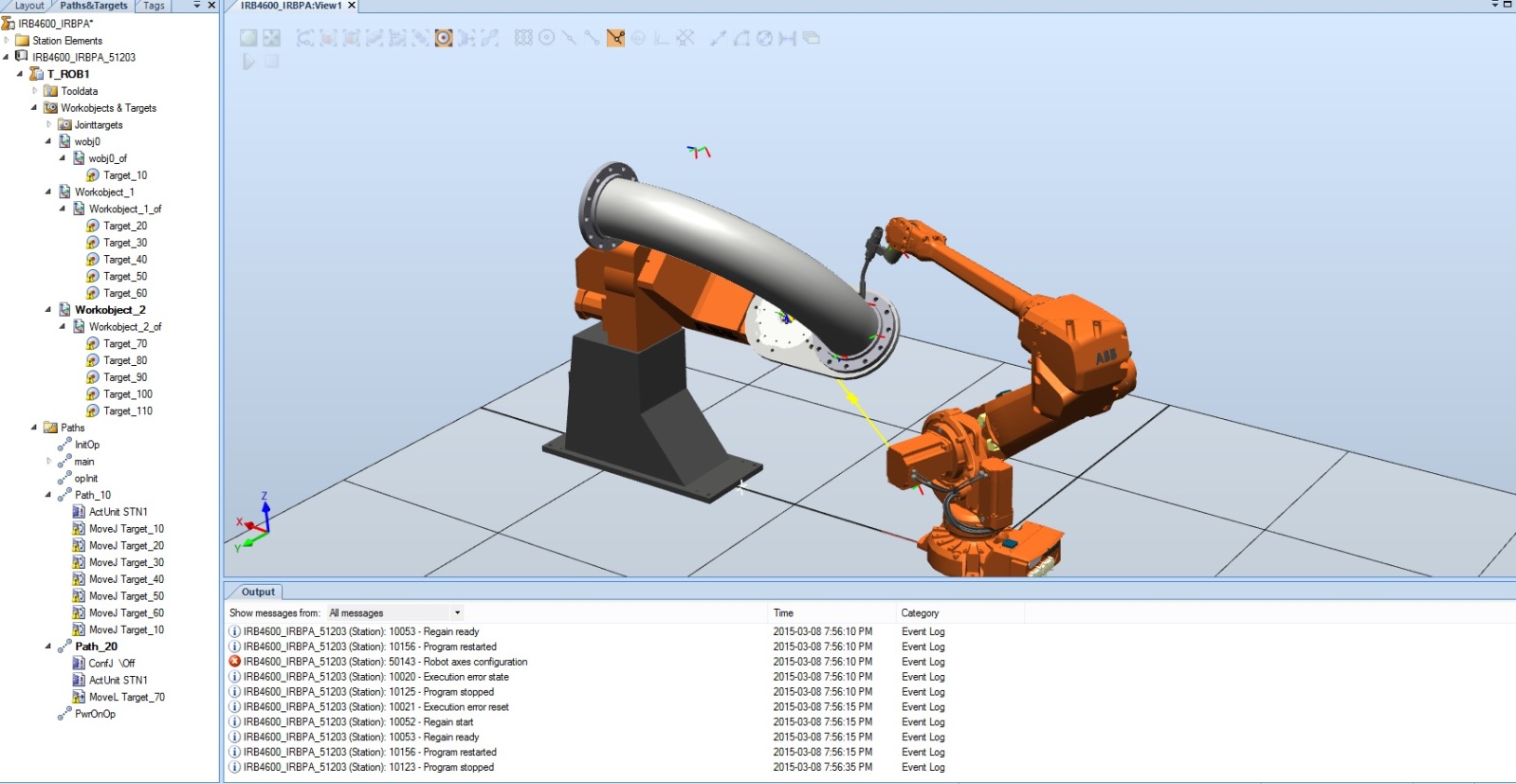
| 2019-05-20 02:23:28 -0500 | marked best answer | move_group with 2DOF workpiece positioner and 6DOF robot Hello all, I am programming cell with 2DOF workpiece positioner and 6DOF robot in MoveIt! How many move_groups is better to do for synchro motions? One general move_group with 8 joints? Or may be two move_groups: 2DOF and 6DOF? Or may be move_group with two subgroups?
Something like that:
|
| 2019-05-20 02:19:51 -0500 | marked best answer | Reducing motion of linear track Hello all, Question is about MoveIt! and OMPL. I have 7DOF move_group with 6DOF KUKA and 1DOF slider (linear axis). I plan motion with RRT-Connect and have large translations of slider. For example slider usually moves 1 meter forward and 1 meter back to move around obstacles. I want to reduce this motion and avoid obstacles primary with KUKA. Of course there will be motion of slider but not so large. Can I set weight of this DOF for minimization translational motion? How can I do it in KDL or TRAC-IK or in planner? This question in googlegroups: https://mail.google.com/mail/u/0/#inb... |
| 2019-05-17 08:26:12 -0500 | received badge | ● Famous Question (source) |
| 2019-04-17 04:05:54 -0500 | received badge | ● Famous Question (source) |
| 2019-02-04 08:11:11 -0500 | received badge | ● Notable Question (source) |
| 2019-02-04 08:11:11 -0500 | received badge | ● Famous Question (source) |
| 2018-08-30 14:12:08 -0500 | received badge | ● Notable Question (source) |
| 2018-08-30 14:12:08 -0500 | received badge | ● Popular Question (source) |
| 2017-09-21 10:00:41 -0500 | edited question | computeCartesianPath fails computeCartesianPath fails Hi all, I use function computeCartesianPath and it fails because of collisions. I check poi |
| 2017-09-21 09:45:34 -0500 | edited question | computeCartesianPath fails Collisions after computeCartesianPath Hi all, I use function computeCartesianPath and it fails because of collisions. |
| 2017-09-21 09:45:03 -0500 | asked a question | computeCartesianPath fails Collisions after computeCartesianPath Hi all, I use function computeCartesianPath and it fails because of collisions. |
| 2017-09-07 01:52:59 -0500 | received badge | ● Famous Question (source) |
| 2017-09-06 08:39:10 -0500 | edited question | Reducing motion of linear track Reducing motion of linear track Hello all, Question is about MoveIt! and OMPL. I have 7DOF move_group with 6DOF KUKA an |
| 2017-08-29 07:24:15 -0500 | received badge | ● Popular Question (source) |
| 2017-08-28 12:15:01 -0500 | asked a question | move_group with 2DOF workpiece positioner and 6DOF robot move_group with 2DOF workpiece positioner and 6DOF robot Hello all, I am programming cell with 2DOF workpiece positione |
| 2017-08-28 02:05:51 -0500 | received badge | ● Notable Question (source) |
| 2017-08-28 02:01:45 -0500 | received badge | ● Notable Question (source) |
| 2017-08-25 07:34:16 -0500 | received badge | ● Popular Question (source) |
| 2017-08-24 05:17:59 -0500 | received badge | ● Student (source) |
| 2017-08-23 16:23:33 -0500 | edited question | Reducing motion of linear track Reducing motion of linear track Hello all, Question is about MoveIt! and OMPL. I have 7DOF move_group with 6DOF KUKA an |
| 2017-08-23 16:22:35 -0500 | asked a question | Reducing motion of linear track Reducing motion of linear track Hello all, I have 7DOF move_group with 6DOF KUKA and 1DOF slider (linear axis). I plan |
| 2017-08-23 16:19:49 -0500 | edited question | Reducing motion of linear track Reducing motion of linear track Hello all, I have 7DOF move_group with 6DOF KUKA and 1DOF slider (linear axis). I plan |
| 2017-08-23 16:17:59 -0500 | asked a question | Reducing motion of linear track Reducing motion of linear track Hello all, I have 7DOF move_group with 6DOF KUKA and 1DOF slider (linear axis). I plan |
| 2017-08-20 17:05:58 -0500 | received badge | ● Famous Question (source) |
| 2017-04-29 08:37:33 -0500 | received badge | ● Enthusiast |
| 2017-04-26 20:53:48 -0500 | edited question | checkCollision in MoveIt doesn't show collision between robot and scene checkCollision in MoveIt doesn't show collision between robot and scene Hi everyone I have problem - function checkColl |
| 2017-04-26 17:04:34 -0500 | received badge | ● Notable Question (source) |
| 2017-04-26 15:35:33 -0500 | commented answer | checkCollision in MoveIt doesn't show collision between robot and scene rbbg, Thank you for your answer! I edited my question |
| 2017-04-26 15:34:44 -0500 | edited question | checkCollision in MoveIt doesn't show collision between robot and scene checkCollision in MoveIt doesn't show collision between robot and scene Hi everyone I have problem - function checkColl |
| 2017-04-23 10:46:23 -0500 | received badge | ● Supporter (source) |
| 2017-04-23 10:26:44 -0500 | received badge | ● Popular Question (source) |
| 2017-04-21 16:57:44 -0500 | received badge | ● Editor (source) |
| 2017-04-21 16:57:44 -0500 | edited question | checkCollision in MoveIt doesn't show collision between robot and scene checkCollision doesn't show collision between robot and scene Hi everyone I use this code for adding collisionObject m |
| 2017-04-21 16:57:09 -0500 | asked a question | checkCollision in MoveIt doesn't show collision between robot and scene checkCollision doesn't show collision between robot and scene Hi everyone I use this code for adding collisionObject m |
| 2017-04-21 16:00:51 -0500 | received badge | ● Popular Question (source) |
| 2017-04-16 21:07:20 -0500 | asked a question | Inverse 7DOF kinematics and planning on CUDA Hello all! I want to use CUDA for computing IKP and planning trajectory of 7DOF robotic arm. Did anyone encounter integration of CUDA or OpenCL with MoveIt (OMPL)? Did anybody compute KDL on GPU - for example used CUDA for FCL (collision checking)? Thanks for attention! |
| 2016-10-20 14:35:10 -0500 | received badge | ● Popular Question (source) |
| 2016-10-20 14:34:13 -0500 | asked a question | Kinetiq teaching of 7DOF robot Hi everybody! I have 7DOF arm made by myself. I want to move it by hand for teaching point (kinetiq teaching). Can I do it with ROS? What packages should I use? Something like that: https://www.youtube.com/watch?v=jzR5N... |
| 2016-10-20 14:20:26 -0500 | received badge | ● Famous Question (source) |
| 2015-12-05 11:23:18 -0500 | received badge | ● Popular Question (source) |
| 2015-12-05 11:23:18 -0500 | received badge | ● Notable Question (source) |
| 2015-12-05 02:32:24 -0500 | asked a question | Ompl. Wrong result with flag haveExactSolutionPath()=true Hi all! I am planning motion of KUKA with OMPL (without MoveIt). It works great but sometimes it writes to me:
I check a flag ss.haveExactSolutionPath() but it is true and my robot crashes. Can I check a validity of path with some flag in OMPL? My code: } |
| 2015-10-26 11:32:06 -0500 | received badge | ● Self-Learner (source) |
| 2015-10-26 11:32:06 -0500 | received badge | ● Teacher (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.