
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-01-12 09:44:33 -0500 | received badge | ● Famous Question (source) |
| 2018-09-02 05:30:20 -0500 | received badge | ● Famous Question (source) |
| 2017-01-29 09:44:14 -0500 | received badge | ● Notable Question (source) |
| 2017-01-28 22:10:40 -0500 | received badge | ● Notable Question (source) |
| 2017-01-28 22:01:58 -0500 | commented question | ROS Subscriber Listner String Message I am using some CAN USB interface, where I am using those receive and transmit nodes which are already existed for this hardware type. So the message that they have used here is std_msgs/String. |
| 2017-01-28 11:16:27 -0500 | received badge | ● Popular Question (source) |
| 2017-01-28 04:13:57 -0500 | asked a question | ROS Subscriber Listner String Message this is the subscriber node from ros tutorials: My string array consists of msg which is shown in image, Now i need to access a particular element in the msg (message consists first time and next CAN message, I want to use particularly CAN.ID whic is arrays second element) any suggestion. thanks in advance |
| 2017-01-25 03:03:56 -0500 | answered a question | libpcan.h not found try to do it by synaptic package manager, it should look like this |
| 2017-01-20 11:56:26 -0500 | received badge | ● Popular Question (source) |
| 2017-01-20 06:20:32 -0500 | asked a question | using two nodes at a time i have two nodes 1) which receives CAN messages from uc board to ROS (publisher) 2) which transmit CAN messages to uc board (subscribing). I need to run both the nodes in order to to these two tasks. Now I am supposed to do: if receive node receives message, it should transmit a CAN message. How can I combine these two nodes or how can use one node information by other?. any suggestions |
| 2017-01-19 04:36:56 -0500 | received badge | ● Popular Question (source) |
| 2017-01-18 15:30:05 -0500 | asked a question | ROS with CAN μc Hallo all, I have two nodes in ROS which can receive (1st node) and transmit (2nd node) CAN messages over a Peak CAN USB Interface. My receive node receives CAN message from μc board, with rostopic pub command line tool I could able to send a CAN message to μc board which turn on LED on μc board. My question is: if the received CAN message is with particular ID (which is published on receive topic)- which should send other CAN message to μc board to turn LED ON. Both the transmit and receive node have their own topics. Could anyone please suggest how to send a CAN message from ROS to μc board as soon as it receives from μc board to ROS. |
| 2016-12-15 03:49:37 -0500 | received badge | ● Famous Question (source) |
| 2016-12-15 03:49:37 -0500 | received badge | ● Notable Question (source) |
| 2016-11-11 10:13:41 -0500 | received badge | ● Famous Question (source) |
| 2016-10-30 06:45:03 -0500 | received badge | ● Famous Question (source) |
| 2015-11-20 04:49:41 -0500 | received badge | ● Student (source) |
| 2015-11-04 15:38:42 -0500 | received badge | ● Notable Question (source) |
| 2015-11-03 09:46:36 -0500 | received badge | ● Popular Question (source) |
| 2015-11-03 04:00:48 -0500 | asked a question | Regarding rqt Hallo all, I am trying to work with gui in ros(in cpp), i have two questions regarding it
|
| 2015-10-22 08:56:55 -0500 | received badge | ● Popular Question (source) |
| 2015-10-16 19:07:45 -0500 | asked a question | Problem in ROS Qt Node I saw an example: Here I made changes in cmakelist.txt as: find_package(Qt4 COMPONENTS QtCore QtGui) include(${QT_USE_FILE}) add_executable(qt_test src/qt_test.cpp) target_link_libraries(qt_test ${QT_LIBRARIES}) Now I tried to do catkin_make then I get the problem: error: expected primary-expression before ‘int’ ros::init(int argc, char **argv,"qt_test"); error: expected primary-expression before ‘int’ ros::init(int argc, char **argv,"qt_test"); Can any one help this problem or should I need to do changes, any suggestions please. Thanks |
| 2015-10-07 05:30:40 -0500 | received badge | ● Famous Question (source) |
| 2015-10-07 04:08:46 -0500 | commented answer | How I completely remove all ros from my system? hello, Actually I had both indigo and jade installed in my system. I tried to remove jade by sudo apt-get remove ros-jade but it shows unable to locate package ros-jade. I want to remove only jade |
| 2015-10-07 03:55:29 -0500 | commented answer | Qt ROS Examples Thanks for your response. As mentioned here I tried to open cmakelist.txt, but it says Cannot create file /opt/ros/jade/share//catkin/cmake/toplevel.cmake.user:Permission denied. Actually I am working with ros indigo(here it shows jade). |
| 2015-09-29 10:51:03 -0500 | received badge | ● Notable Question (source) |
| 2015-09-29 10:06:48 -0500 | received badge | ● Notable Question (source) |
| 2015-09-29 08:09:05 -0500 | received badge | ● Popular Question (source) |
| 2015-09-29 04:18:12 -0500 | received badge | ● Editor (source) |
| 2015-09-29 04:17:52 -0500 | asked a question | Qt ROS Examples Hello, My doubt is, If I want to write a ros node using qt GUI- Is it necessary to follow rqt plugin cpp tutorial(I mean is it necessary to create a plugin) or is it possible to write a node and add cmakelist.txt as here. A small example to which opens a qt window is very helpful. Many thanks in advance. |
| 2015-09-29 02:57:24 -0500 | received badge | ● Enthusiast |
| 2015-09-28 05:35:22 -0500 | received badge | ● Popular Question (source) |
| 2015-09-27 19:19:59 -0500 | asked a question | Suggestions- Publishing data on a topic using Qt Slider Hello All, I am new to ROS, I need help regarding implementation of qt-slider in ros. Can any one help me or give suggestions, thanks in advance. I have qt source files: Please have a look: Can any one help me to publish this message(i mean 'canmsg') on topic(any). As discussed in qt ros, I made changes in cmakelist.txt. Thanks for reading. |
| 2015-09-01 16:29:35 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
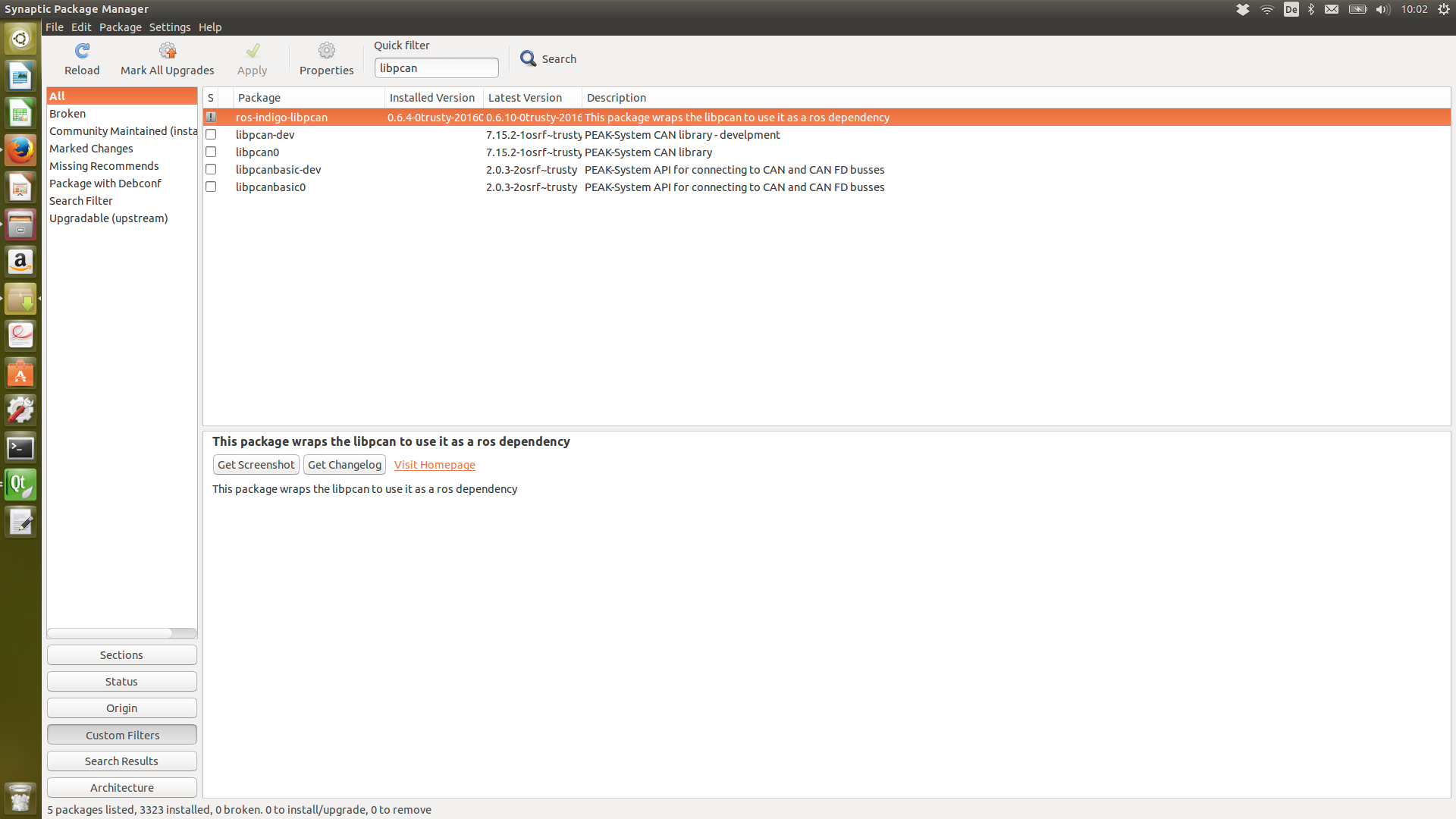 , I hope it works
, I hope it works