The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-05-20 16:15:07 -0500 | received badge | ● Famous Question (source) |
| 2020-05-20 16:15:07 -0500 | received badge | ● Notable Question (source) |
| 2020-05-20 16:15:07 -0500 | received badge | ● Popular Question (source) |
| 2017-05-22 23:16:31 -0500 | received badge | ● Famous Question (source) |
| 2016-07-25 13:59:58 -0500 | received badge | ● Famous Question (source) |
| 2016-06-12 22:38:32 -0500 | received badge | ● Notable Question (source) |
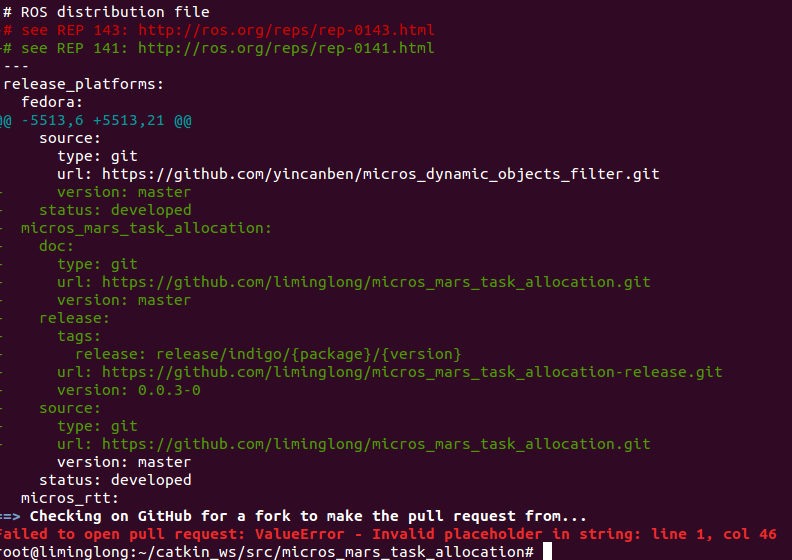
| 2016-06-12 19:16:41 -0500 | asked a question | A bug when releasing a package written by myself using bloom-release. I wrote a ROS package by myself about multi-task coordination among team robots. However, when I want to release the package by the bloom-release tools, it broke down at the final step. The debug information is "Failed to open pull request: ValueError - Invalid placeholder in string: line 1, col 46".
|
| 2016-04-08 09:08:58 -0500 | received badge | ● Notable Question (source) |
| 2016-03-21 21:14:24 -0500 | received badge | ● Popular Question (source) |
| 2016-03-07 02:35:41 -0500 | asked a question | How to launch multiple turtlebots in real environment? I want to launch multiple turtlebots in real environment. In this scenario, there are several turtlebots and a remote workstation connected with each other. I want the robots to be controlled independently. I know how to revise the navigation and amcl launch files. But I don't know how to revise the minimal.launch file in turtlebot_bringup package of each robot to accomplish this. The ROS version I use is Indigo.Thank you! |
| 2016-01-16 22:53:14 -0500 | received badge | ● Popular Question (source) |
| 2016-01-13 01:16:24 -0500 | asked a question | How to add a camera on a robot in the stage simulator? On the web page of stage_ros wiki, I notice several topics including: However, when I launch turtlebot_stage. I don't find any depth or camera_info. I want to know that how to add a camera on a robot in the stage simulator. Thank you! |
| 2015-11-05 02:53:27 -0500 | received badge | ● Enthusiast |
| 2015-11-05 02:53:27 -0500 | received badge | ● Enthusiast |
| 2015-11-05 02:53:26 -0500 | received badge | ● Enthusiast |
| 2015-09-22 12:39:39 -0500 | received badge | ● Famous Question (source) |
| 2015-09-22 06:13:21 -0500 | commented answer | cannot launch node of type [rocon_interactions/interactions_manager.py] I also want to know what you wiped? All the ROS system? |
| 2015-09-20 05:51:27 -0500 | received badge | ● Notable Question (source) |
| 2015-09-20 04:39:32 -0500 | commented question | How to implement Rodney Brooks' subsumption model on ROS? Thank you for your clear and patient answers! |
| 2015-09-20 04:34:12 -0500 | received badge | ● Editor (source) |
| 2015-09-20 02:48:05 -0500 | received badge | ● Student (source) |
| 2015-09-19 22:17:57 -0500 | received badge | ● Popular Question (source) |
| 2015-09-19 20:20:22 -0500 | commented question | How to implement Rodney Brooks' subsumption model on ROS?
|
| 2015-09-19 20:15:45 -0500 | commented question | How to implement Rodney Brooks' subsumption model on ROS?
|
| 2015-09-19 11:13:44 -0500 | commented question | How to implement Rodney Brooks' subsumption model on ROS? the inhibitors are also very important, we can inhibit some behavior of lower layer immediately, and then do some sensing or calculating things, output the result instead to the lower layer. but there is not inhibitor in the cmd velocity multiplexer. |
| 2015-09-19 11:09:36 -0500 | commented question | How to implement Rodney Brooks' subsumption model on ROS? However, all the inhibitors and suppressors in subsumption model is decentralized causing that we can insert them in any place of any layers. |
| 2015-09-19 11:07:04 -0500 | commented question | How to implement Rodney Brooks' subsumption model on ROS? I think the key idea of subsumption model is that the upper layer can either contain or suppress partial function units of lower layer. But the multiplexer is just a priority-based selector for velocity output. What's more,the multiplexer is just one single process. |
| 2015-09-19 10:24:11 -0500 | commented answer | ros process in subsumption architecture Can multiplexer construct a subsumption architecture on ROS? |
| 2015-09-19 10:24:10 -0500 | asked a question | How to implement Rodney Brooks' subsumption model on ROS? As we all know, Rodney Brooks' subsumption model is an extremely successful control architecture for robot. ROS provides us with a lot of driver and function packages. To construct a complex and intelligent robot software system, we should organize these packages. Subsumption model is a good choice. So, I want to know that whether ROS provide us with a mothod to implement subsumption model upon it? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.