The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-01-26 02:59:47 -0500 | received badge | ● Nice Question (source) |
| 2017-02-08 10:36:57 -0500 | received badge | ● Student (source) |
| 2015-11-17 05:25:43 -0500 | received badge | ● Famous Question (source) |
| 2015-11-17 05:25:43 -0500 | received badge | ● Popular Question (source) |
| 2015-11-17 05:25:43 -0500 | received badge | ● Notable Question (source) |
| 2015-11-17 05:18:34 -0500 | received badge | ● Famous Question (source) |
| 2015-11-14 20:18:33 -0500 | asked a question | stable contact force sensor Hi all, I'm using the contact sensor plugin in ros (libgazebo_ros_bumper.so) to get the robot contact forces from gazebo. It works very well for the contact positions, but it's extremely unstable in the force computation. Also after filtering the signal it still remains really noisy. Someone can suggest me how to get a reliable contact force? Any help is really appreciated, thanks! I'm using Ubuntu 12.04, Ros Hydro, Gazebo 1.9.6 |
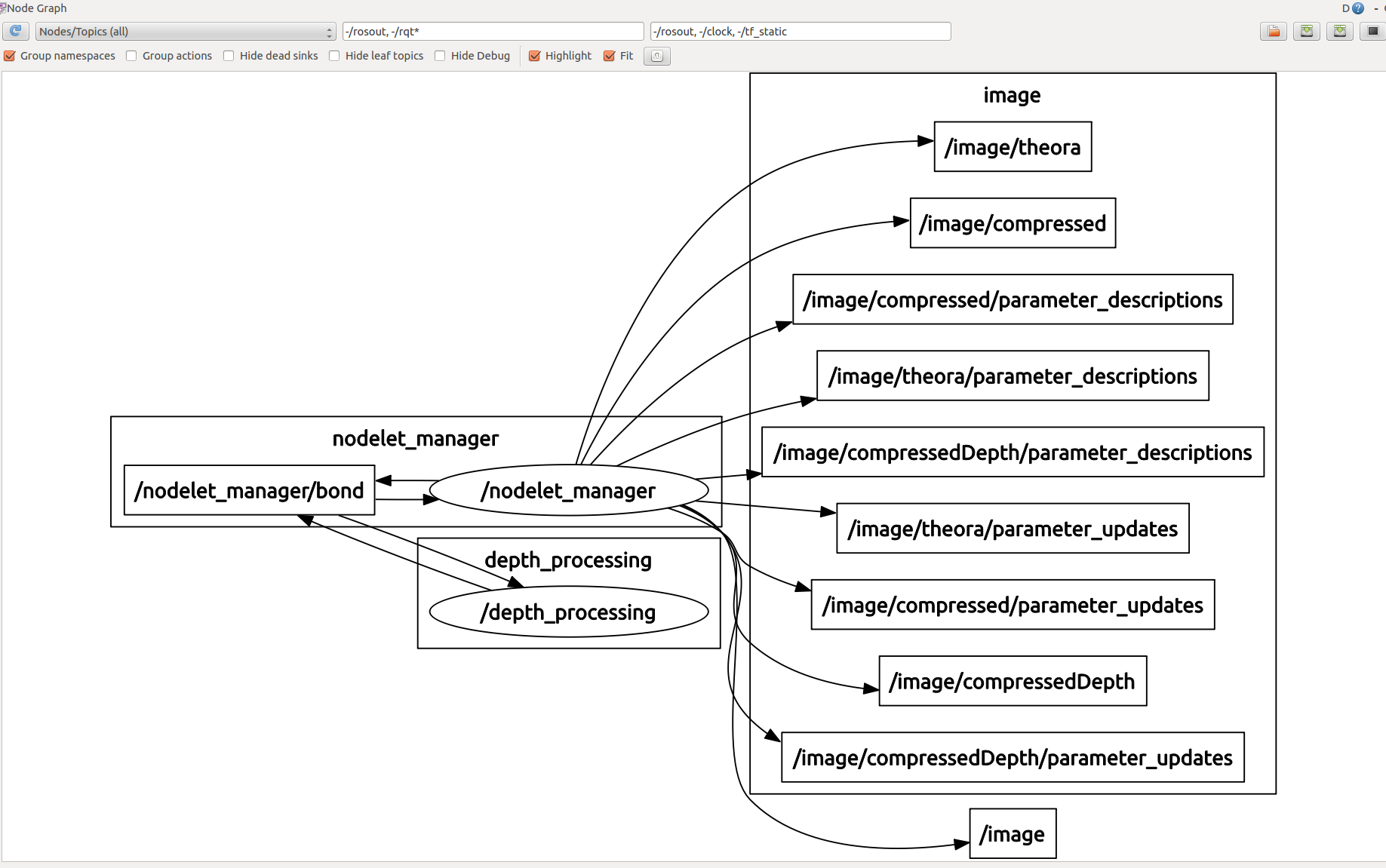
| 2015-10-31 08:46:56 -0500 | asked a question | no subscribed topics in image_pipeline stack Hello, I am trying to use the image_pipeline nodelets, but when I run any one of them, there are no subscribed topics at all! This is a really simple example: I launch the nodelet and I can see the published topics, but not the subscribed one. I feel like I'm missing something really simple... I'm using ROS Hydro, Ubuntu 12.04 Here is my launchfile: and the rqt_graph:
Thanks for your help! |
| 2015-10-15 02:19:16 -0500 | received badge | ● Notable Question (source) |
| 2015-09-23 16:38:34 -0500 | received badge | ● Famous Question (source) |
| 2015-07-27 11:54:58 -0500 | received badge | ● Notable Question (source) |
| 2015-07-27 09:48:43 -0500 | answered a question | multiple callback queues thank you, extremely useful! |
| 2015-07-27 09:22:48 -0500 | received badge | ● Popular Question (source) |
| 2015-07-27 07:03:53 -0500 | received badge | ● Supporter (source) |
| 2015-07-27 02:59:20 -0500 | asked a question | multiple callback queues Hello, I'm using a ROS node to read from several topics calling ros::spinOnce in a loop. Every time I call spinOnce it checks every topic to which the node is subscribed, what I want instead is to check specific topics at different points in my code. I've seen here that I can achieve it using different callback queues, but when it comes to explain how to assign different callbacks to different queues the link refers to subscribers API and I got lost. Can someone post an example of how to assign, let's say, Callback_1 to queue_1 and Callback_2 to queue_2? Thanks in advance! |
| 2015-07-27 02:13:07 -0500 | received badge | ● Enthusiast |
| 2015-07-16 16:16:30 -0500 | received badge | ● Popular Question (source) |
| 2015-07-16 11:28:17 -0500 | commented answer | use dynamic reconfigure with arrays Sorry, but i'm a newbie, what is a group type? |
| 2015-07-16 11:23:21 -0500 | received badge | ● Scholar (source) |
| 2015-07-16 05:54:26 -0500 | asked a question | use dynamic reconfigure with arrays Hello, I want to use dynamic reconfiguration to modify an array in a ROS node, but I didn't found any example of how to modify the .cfg file on the web. I want this line: gen.add("int_param", int_t, 0, "An Integer parameter", 50, 0, 100) in something kind of: gen.add("int_array", int_t[2], 0, "An Integer array", [50 20], [0 0], [100 100]) Can someone help? Thanks! |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.