The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-01-15 04:38:17 -0500 | received badge | ● Enlightened (source) |
| 2019-01-15 04:38:17 -0500 | received badge | ● Good Answer (source) |
| 2018-08-31 03:17:50 -0500 | received badge | ● Famous Question (source) |
| 2018-01-11 20:33:59 -0500 | marked best answer | Invalid package manifest "package.xml" Hi! I found a some entries but none seem to help with my problem. I am currently following the instructions to install turtlebot on this site: http://wiki.ros.org/turtlebot/Tutoria... when running following command under point 2.2: I get following stack trace: There must be a problem with my package.xml file. It seems that the package version 2 might cause the error but I honestly don't know how to fix it. Does anyone have any ideas? Thanks in advance! |
| 2017-05-02 15:05:41 -0500 | marked best answer | roslaunch not working Hello! When trying to run I am getting the following error: the file exists though and the whole installation before worked fine! I don't know where to look. Any ideas? |
| 2017-01-16 12:36:57 -0500 | received badge | ● Notable Question (source) |
| 2017-01-16 12:36:57 -0500 | received badge | ● Popular Question (source) |
| 2016-10-27 04:54:27 -0500 | received badge | ● Famous Question (source) |
| 2016-08-18 03:14:30 -0500 | answered a question | catkin_make src failing Ok, the problem vanished the same way as it came. I did not do anything except putting an alias in the bashrc like this: this is exactly what I did a million times already... opened up a new shell, ran cat_make and suddenly my package could be found again... Strange. |
| 2016-08-18 02:58:32 -0500 | asked a question | catkin_make src failing Hi! I am currently having a weird problem. My package cannot be found anymore even though it was working before. I put the package larah in the src folder and the workspace setup is correct. I also sourced the devel/setup.bash. roscd larah does not find the package either and rospack profile didn't help. catkin_make seems to be working fine: But catkin_make src gives me following output: also: ROS_PACKAGE_PATH gives the correct location of my package... Any ideas?? Thank you! Salocin |
| 2016-08-03 04:46:49 -0500 | received badge | ● Taxonomist |
| 2016-07-26 07:57:26 -0500 | received badge | ● Nice Answer (source) |
| 2016-01-30 12:50:37 -0500 | received badge | ● Famous Question (source) |
| 2016-01-23 21:27:04 -0500 | received badge | ● Notable Question (source) |
| 2015-11-23 08:47:00 -0500 | received badge | ● Famous Question (source) |
| 2015-11-14 09:06:53 -0500 | received badge | ● Famous Question (source) |
| 2015-09-23 10:05:47 -0500 | received badge | ● Famous Question (source) |
| 2015-08-06 08:31:48 -0500 | commented answer | publish rtab point cloud from rviz Ok thank you very much, it has been very helpful! |
| 2015-08-06 08:16:53 -0500 | received badge | ● Notable Question (source) |
| 2015-08-06 07:30:53 -0500 | received badge | ● Notable Question (source) |
| 2015-08-06 07:29:47 -0500 | marked best answer | roslaunch turtlebot_bringup minimal.launch not working Hi! I followed the instructions for installing the turtlebot and everything seemed to be working fine! However, when I try to start the connection with turtlebot I get following output: The difference with this output to the instructions is that after the line:
Does anyone have an idea what's wrong? Thanks in advance! |
| 2015-08-06 07:29:41 -0500 | received badge | ● Famous Question (source) |
| 2015-08-06 07:27:13 -0500 | commented answer | publish rtab point cloud from rviz Oh ok perfect. I have one more question: when opening the file, I get X Y Z RGB values for the points. But the RGB values are float. The representation looks like this: 1.8005456 -0.7766516 -0.0509897 4.8842062e-39 The fourth number should be RGB but how? Can I get values for the three channels? |
| 2015-08-06 03:11:07 -0500 | commented answer | publish rtab point cloud from rviz salocin@salocin-laptop:~$ rosrun pcl_ros pcd_to_pointcloud ~/1438846855801553.pcd [ INFO] [1438848137.530670782]: Publishing data on topic /cloud_pcd with frame_id /base_link. [ INFO] [1438848137.542530309]: Loaded a point cloud with 1670 points (total size is 26720) and the following channels: x y |
| 2015-08-06 03:10:16 -0500 | commented answer | publish rtab point cloud from rviz Thank you very much for your help! I am definately closer to where I want to be now. pcl_ros was a good tip. I can generate the .pcd files now but I want to have the coordinates with RGB values. So I figured, I could just convert it back with pcd_to_pointcloud. After these lines nothing's happening: |
| 2015-08-06 03:04:33 -0500 | received badge | ● Supporter (source) |
| 2015-08-06 03:03:19 -0500 | received badge | ● Popular Question (source) |
| 2015-08-06 03:03:16 -0500 | received badge | ● Enthusiast |
| 2015-08-06 01:18:40 -0500 | received badge | ● Notable Question (source) |
| 2015-08-05 06:56:54 -0500 | received badge | ● Organizer (source) |
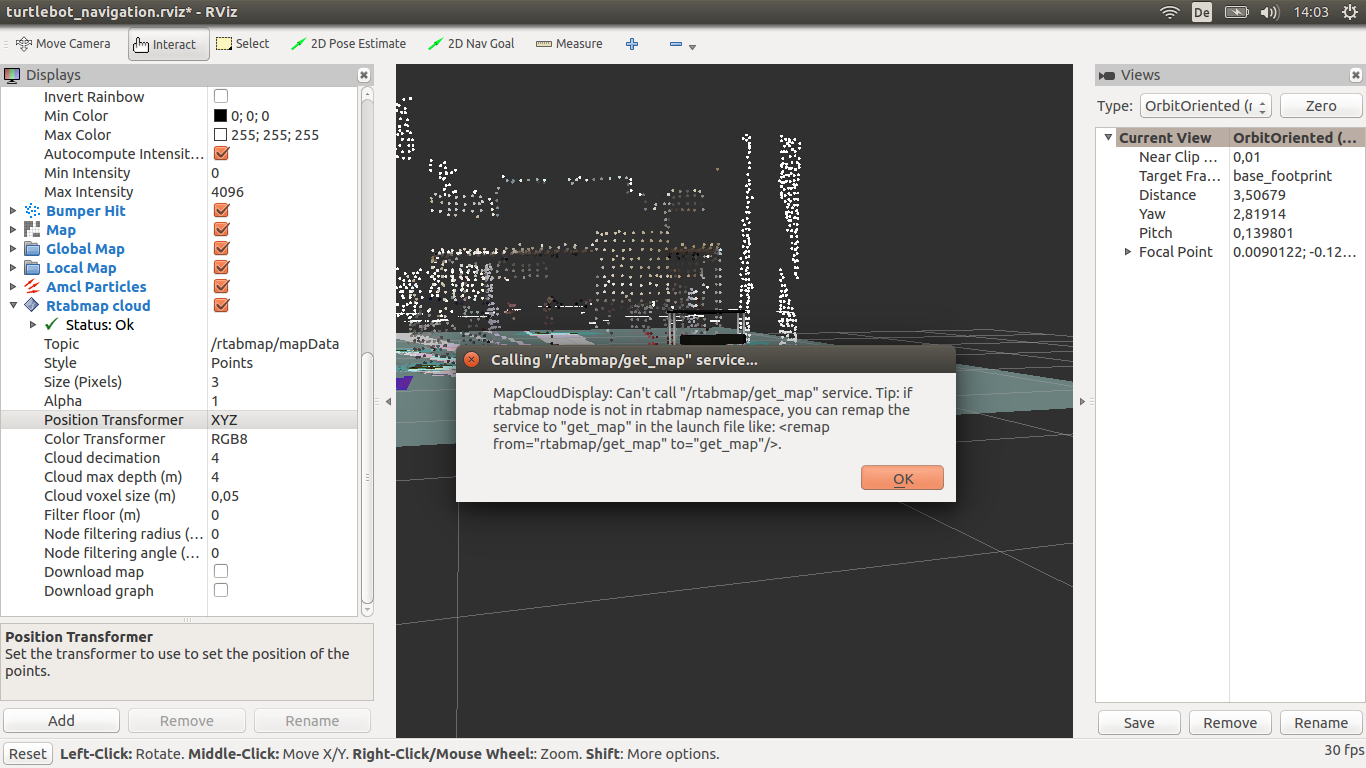
| 2015-08-05 06:56:27 -0500 | asked a question | publish rtab point cloud from rviz Hey! I am currently following this tutorial on my turtlebot: http://wiki.ros.org/rtabmap_ros#Nodes Therefore I started turtlebot and rviz like this: It all works fine but I don't know how to export the point cloud I created. My goal is to have a list of XYZ coordinates from all points. Anyone got any ideas? EDIT: I tried to run but that does nothing... and when I click the get map option in RVIZ it is first trying to call get_map and then I get the error:
rtab/get_map is in the namespace though. Here is part of my rosservice list: |
| 2015-07-26 21:13:59 -0500 | received badge | ● Popular Question (source) |
| 2015-07-24 09:11:01 -0500 | received badge | ● Popular Question (source) |
| 2015-07-21 10:24:03 -0500 | answered a question | coffeebot webserver open problems The problem was that I didn't allow http in my security preferences of the web server ... |
| 2015-07-21 04:00:13 -0500 | asked a question | coffeebot webserver open problems Hi! I am currently using the LAMP stack as explained in the http://learn.turtlebot.com/2015/02/01... tutorial. The goal is to order a coffee (robot driving to specific location) through a chrome extension. I am running the turtlebot_bringup minimal.launch and loaded my map on the turtlebot laptop. I installed the LAMP correctly and entered the public_dns where I had to. Here is my traceback: I changed the path from to: because when ssh into the server, this is where it is located. But either way it is not working. Can anyone help? Thanks in advance! Cheers |
| 2015-07-21 02:48:10 -0500 | commented answer | Scan message must contain angles from -x to x well, after changing the value to 0.03 I never had problems.. where should I report the bug? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.