The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-01-18 14:23:40 -0500 | received badge | ● Nice Question (source) |
| 2021-09-02 11:56:41 -0500 | received badge | ● Great Question (source) |
| 2021-05-21 03:38:36 -0500 | received badge | ● Good Answer (source) |
| 2020-12-13 19:05:22 -0500 | marked best answer | Ask about the usage of the tilde '~'sign Ask about the usage of the tilde '~'sign what's the difference between : and: By the way, what's the Thank you!! |
| 2019-12-18 09:17:11 -0500 | received badge | ● Famous Question (source) |
| 2019-09-20 02:07:20 -0500 | marked best answer | How to use file to manage navigation goals? Application: Save several pose and quaternion pairs into a file and load them to plan a navigation which has several intermediate stops. Background: I'm developing nodes that can receive user's command and save current pose/quaternion data of robot into a file(e.g. yaml file or bag file) in an sequence. This is called task planning. I will also make a node that can load that file and make the robot go to goals in sequence recorded in that file. This is called task replaying. Question: Is there any tool/ros_package that I can use? My plan now is using the Thank You! ps: if there is any puzzles, feel free to ask me. :-) ======================================== |
| 2019-09-20 02:07:01 -0500 | received badge | ● Famous Question (source) |
| 2019-04-13 13:16:50 -0500 | received badge | ● Notable Question (source) |
| 2019-04-13 13:16:50 -0500 | received badge | ● Famous Question (source) |
| 2019-04-13 13:16:50 -0500 | received badge | ● Popular Question (source) |
| 2019-03-08 20:59:25 -0500 | received badge | ● Good Question (source) |
| 2019-01-15 15:28:44 -0500 | received badge | ● Good Question (source) |
| 2018-09-12 02:32:10 -0500 | received badge | ● Nice Answer (source) |
| 2018-08-13 15:51:13 -0500 | received badge | ● Notable Question (source) |
| 2018-08-13 15:51:13 -0500 | received badge | ● Famous Question (source) |
| 2018-04-28 04:18:43 -0500 | received badge | ● Famous Question (source) |
| 2018-04-28 04:18:43 -0500 | received badge | ● Popular Question (source) |
| 2018-04-28 04:18:43 -0500 | received badge | ● Notable Question (source) |
| 2018-02-28 20:30:43 -0500 | marked best answer | How to rostopic pub multiple line for std_msgs/String type topic How to use I tried as YAML commandLine said. but nothing works. Thank you!!!
|
| 2018-01-11 20:39:17 -0500 | marked best answer | rostpoic pub & teleop_key reference: http://wiki.ros.org/ROS/Tutorials/Usi... I have a question: when 'roslaunch' launchs the turtlemimic.launch file, there appears two turtles' window. Why can I only use 'rostopic pub' command to drive the turtle1, however, I cannot use 'rosrun turtlesim turtle_teleop_key' command to do that. the instruction page: http://wiki.ros.org/ROS/Tutorials/Usi... the 'rostopic pub' command: $ rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]' the 'rosrun turtlesim turtle_teleop_key' command: $ rosrun turtlesim turtle_teleop_key |
| 2017-11-30 02:47:46 -0500 | received badge | ● Self-Learner (source) |
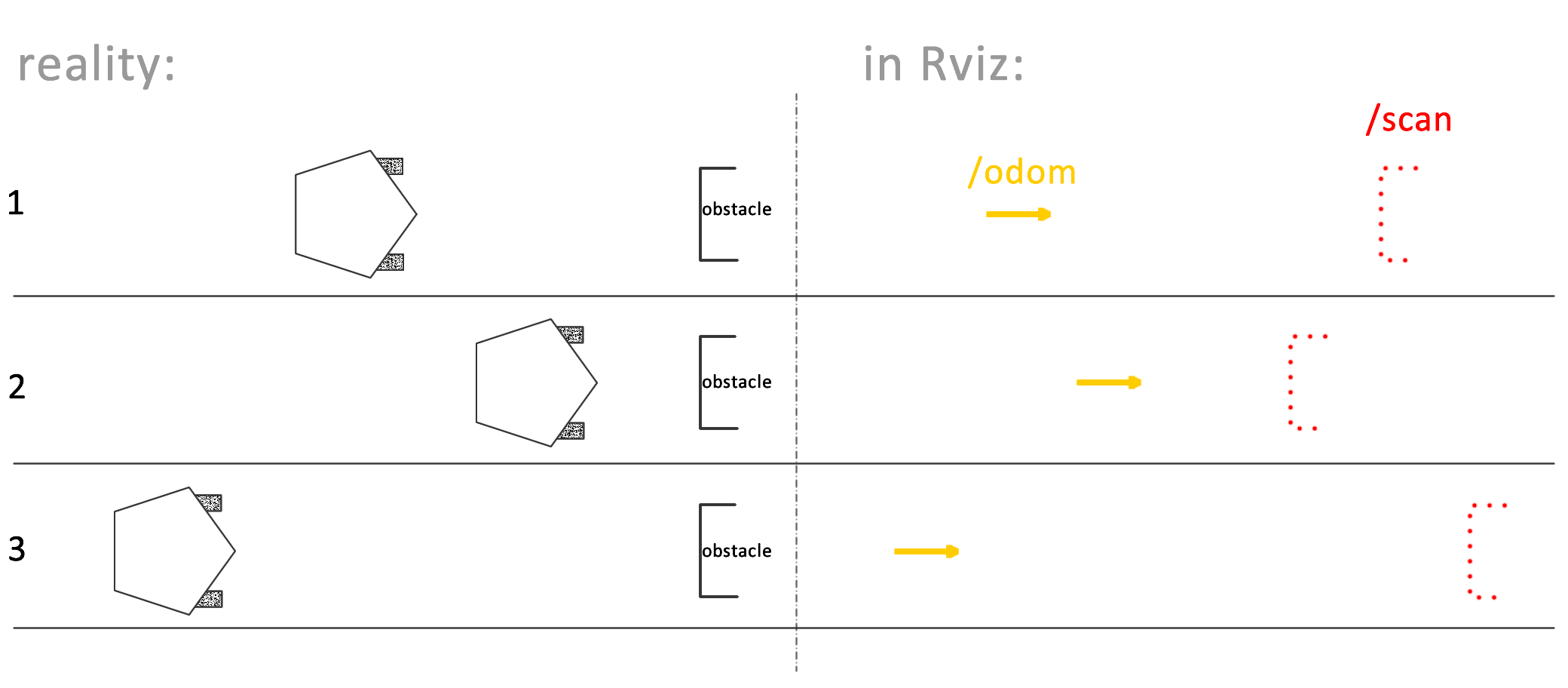
| 2017-09-13 19:31:33 -0500 | marked best answer | sliding-scan problem when gmaping I met error when i use gmaping: in rviz , i see the simulated position is 1/2 of the reality, when i was using when I echo the topic please see the figure below: Thank You Very Much!!
I refered the gmaping wiki page and met the tf requirements. I'm using my Question is: How to configure my gmapping or other things to make the /scan can be relative static with /map? so I can build reasonable map. |
| 2017-08-10 20:07:03 -0500 | received badge | ● Notable Question (source) |
| 2017-07-17 09:36:22 -0500 | received badge | ● Famous Question (source) |
| 2017-06-17 10:17:38 -0500 | received badge | ● Famous Question (source) |
| 2017-05-19 06:42:49 -0500 | received badge | ● Nice Question (source) |
| 2017-05-19 06:42:46 -0500 | marked best answer | what's the diff. between rospy.Time(0) and rospy.Time.now()? rospy.Time(0) 这是什么含义? 跟rospy.Time.now() 有啥区别? Hi, I'm learning tf and time at this link and I'm confused about the different between Could you explain it for me? Thank you very much!! |
| 2017-04-04 15:48:23 -0500 | received badge | ● Famous Question (source) |
| 2017-03-27 12:51:46 -0500 | marked best answer | How to set turtlebot to point to some orientation when it arrives? how to set the turtlebot point or not point to a specific orientation when it arrives the goal? I'm using rviz to set the goal for my mova_base for Turtlebot. How to configure the amcl files or something others to make the turtlebot point or not point to the specific orientation when it arrives the goal. Thanks!! |
| 2017-03-27 12:51:29 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.