
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-08-03 12:19:15 -0500 | received badge | ● Famous Question (source) |
| 2020-09-29 04:09:45 -0500 | received badge | ● Notable Question (source) |
| 2020-02-27 15:40:27 -0500 | marked best answer | [Roscpp] How to subscribe to a topic once ? Hi guys I have a little problem here. I am writing just small code for basic joint moves of my arm manipulator in ros. I want to start with topics some services and work with parameters just to train ROS basics. I already created URDF and model in moveit but for first time a just want to move it easy way and then start with actionlib. This is my simple code. I setup voltages there and I created publisher which is publishing arms positions and I subscribe to it. This is just Main there are 5 more proceses and one service server for comunication. I have a problem in case 2 where I want to subscribe for the topic and read positions for one time. I have problem when i use ros::spin() it cannot stop subscribing and when i use ros::spinOnce() it just stay in a loop and never broke it. Can you help me how to read just for once and then jump to loop and wait for another prikaz(comman in english) for case. Thank you for your time and any ideas. prikaz is global variable |
| 2019-04-10 03:38:31 -0500 | received badge | ● Famous Question (source) |
| 2018-09-10 14:41:55 -0500 | received badge | ● Notable Question (source) |
| 2018-09-10 05:45:23 -0500 | received badge | ● Popular Question (source) |
| 2018-09-10 05:02:33 -0500 | commented question | respawn parameter problem I added my scripts for better understanding the problem |
| 2018-09-10 05:02:15 -0500 | edited question | respawn parameter problem respawn parameter problem Hi I am starting my launchfiles using this tutorial http://wiki.ros.org/roslaunch/API%20Usage |
| 2018-08-20 02:17:24 -0500 | asked a question | respawn parameter problem in roslaunch respawn parameter problem in roslaunch Hi I am starting my launchfiles using this tutorial http://wiki.ros.org/roslaunc |
| 2018-08-20 02:15:19 -0500 | asked a question | respawn parameter problem respawn parameter problem Hi I am starting my launchfiles using this tutorial http://wiki.ros.org/roslaunch/API%20Usage |
| 2018-03-14 10:53:46 -0500 | received badge | ● Famous Question (source) |
| 2018-02-08 13:24:35 -0500 | received badge | ● Famous Question (source) |
| 2017-11-02 15:12:24 -0500 | received badge | ● Notable Question (source) |
| 2017-11-02 15:12:24 -0500 | received badge | ● Popular Question (source) |
| 2017-11-02 15:12:24 -0500 | received badge | ● Famous Question (source) |
| 2017-05-17 12:39:41 -0500 | received badge | ● Popular Question (source) |
| 2017-04-20 14:56:33 -0500 | marked best answer | arm navigation 6dof Hi guys I created moveit package and wrote drivers for my 6 dof manipulator and I also can control manipulator with moveit. I also created joint trajectory action server for moveit and simulation of robot in Gazebo. But I dont like idea that I have to plan the path and than execute. I would like to use or create teleoperation control of my robotic manipulator with joystick "real-time". So it would follow the axes X Y Z and maybe do some basic rotations around point. Can you help me how to realize that and maybe give me som hints ? Thanks for your help |
| 2017-04-13 14:22:32 -0500 | asked a question | kinect to robot arm tool calibration Hi guys I have my kinect placed on tool of robotic manipulator arm ABB and I am able to control it over ROS. I am also sending back to pc tool0 transformations and joint states. I would like to use transformation of toolpoint of robotic manipulator and use it for generating poinclouds of objects. But I have problems to correctly calibrate kinect sensor base which is obtaining data to the tool0 of the abb (there is some transformation and rotation). Can you give me any hints how to do this calibration maybe some packages. I could not find anything similar. Thank you for your answer |
| 2016-12-16 10:43:57 -0500 | received badge | ● Taxonomist |
| 2016-12-09 14:11:35 -0500 | received badge | ● Notable Question (source) |
| 2016-09-18 14:32:53 -0500 | received badge | ● Famous Question (source) |
| 2016-09-14 01:51:20 -0500 | commented question | realtime_collision_detection, Thank you I read that but in answer half of the paragph three is 404 not found I mean the paragraph which starts: "See the MoveIt wiki for info on how to Retrieve Contact Info." |
| 2016-09-14 01:06:57 -0500 | received badge | ● Popular Question (source) |
| 2016-09-13 09:50:42 -0500 | asked a question | realtime_collision_detection, Hi guys! I have my robot manipulator controlled with joystick through velocity controller interface. Is there a way to implement realtime collision detection? I read a lot of forums but cannot find proper answer. I am looking for something that is able to tell me nearest distance of links of my arm. Then I can use this distance and setup robot to stop when it reaches minimum distance. Am I able to check this information in Moveit ?? I had also read something about fast collision library (FCL) but I can only get distance from two objects but I am looking for some smart way to check this distance. Thank you for your time and help |
| 2016-09-09 05:50:18 -0500 | received badge | ● Notable Question (source) |
| 2016-08-19 04:03:16 -0500 | received badge | ● Famous Question (source) |
| 2016-08-12 08:02:11 -0500 | received badge | ● Famous Question (source) |
| 2016-08-12 08:00:16 -0500 | received badge | ● Notable Question (source) |
| 2016-08-12 05:26:49 -0500 | received badge | ● Notable Question (source) |
| 2016-08-12 05:26:49 -0500 | received badge | ● Popular Question (source) |
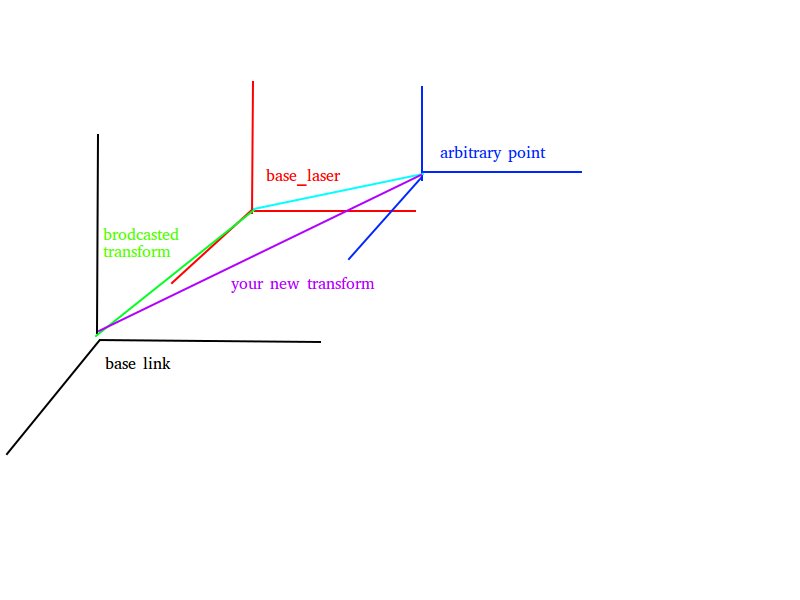
| 2016-08-10 15:32:11 -0500 | answered a question | TF tutorials question Ok so I try to answer your questions. I dont have very good english so I hope you will understand. 1 When you load your urdf on a parameter server and then you run robot state publisher. It could create transformations for your robot. You dont need to create broadcaster. Robot state publisher will take as a parameter your robot_description and use it for creating transformations 2 This tutorial has nothing to do with mapping. It just shows and explains trasnformations. In the first part you create broadcaster which broadcasts transformation between base_laser and base_link. Then you choose arbitrary point in coordinate system of base_laser and transform it to coordinate system of base_link. And thats all, transformation represents rotation and translation in space.
3 I dont know if you understand the issue but this topic http://docs.ros.org/api/sensor_msgs/h... represent and defines a data from laser scan. TF is just used to locate laser_base in space relative to the robot_base. Last thing. Feel free to ask I am beginner too and I also don't understand everything. Year before when I began with ros I had same questions as you. I know my explanation is also not the best but I hope it helps. |
| 2016-08-10 07:21:34 -0500 | commented question | invisible links in rviz yes please share your urdf and launchfile and maybe screen of your left panel in rviz because in the picture left panel is hidden. |
| 2016-08-09 18:55:34 -0500 | commented question | TF tutorials question http://wiki.ros.org/robot_state_publi... here is how to use robot_state_publisher with your robot urdf |
| 2016-08-09 18:50:18 -0500 | commented question | TF tutorials question robot_state_publisher should do all tf broadcasting for you but I still dont understand what are you trying to do. You just want to complete tutorial and you encountered some problem or you want to use lidar for mapping ? |
| 2016-08-09 18:45:24 -0500 | commented question | invisible links in rviz are you getting some error in console or could you post foto what is appearing on your screen when you launch rviz |
| 2016-08-09 18:29:40 -0500 | commented answer | [MoveIt!] How to Use the Python Move Group Interface your move group should be running when you call "robot_moveit_config" is name of your package you setuped in setup_assistant. If it still does not work you can send me your "robot_moveit_config" and I could try to move robot on my own using python |
| 2016-08-09 18:22:24 -0500 | commented answer | ros_databases No problem. I am really grateful for your time and effort. I am glad that there are still people like you. |
| 2016-08-09 07:57:21 -0500 | marked best answer | ros_databases Hi guys I am planning to do something like trajectory manager for my robotic application. I created pretty solid rqt plugin and also joint trajectory client, gripper client and everything that was needed for controlling my stuff but I have now huge problem with data storage. Is there any great database which is able to store messages in rows and structures. For example I want learn my robot new trajectories but I also want to record points and move arm step by step, add new trajectories and so on. I want to create something which can store trajectories and points like for example abb flexpendant if you have any experience with it. Is there any great database for this. I was reading about mongo database or rosbag. But I cannot find any usefull API documentation. I know how to store or record some messages but that is not enough. Can you please give me some hints or tips. Maybe I just did not explore everything which can these databases do. I have to say that I dont have a lot of experience with databases yet Thank you for your time and help. |
| 2016-08-09 07:56:42 -0500 | commented answer | ros_databases Found solution http://docs.ros.org/jade/api/moveit_r... I initialize move_group in Constructor where I also initialized your database. I solve it by commenting line 1118 and every methods connected with it in move_group.cpp |
| 2016-08-08 17:59:20 -0500 | answered a question | [MoveIt!] How to Use the Python Move Group Interface Hi I am not very skilled with python but I am using move_group with c++. For implementig that tutorial on your robot. You just need to change this command. Instead of "left_arm" you should put name of your planning group which you specified in moveit_setup_assistant Next important thing is to change desired goal to the real position which could your manipulator really reach. Remember as it was mentioned in tutorial trajectory will be just planned and not executed Whole code could be found here https://github.com/ros-planning/movei... When you will running code remember that your move_group should be running. |
| 2016-08-08 13:46:49 -0500 | marked best answer | Gazebo_ros_control - lwa4p Hi I have model of schunk_lwa4p and I want to simulate and control it in gazebo with ros controllers. Everything works fine but in URDF was specified hardware interface for actuators and for joints like this: When I am starting robot simulation Position controller works fine but I got this warning And then after this warning I have problem loading velocity interface Is it possible to load multiple hardware interfaces in gazebo_ros ??? or I could always load only one interface ?? I am using standart ros_control gazebo plugin. Thank you for your time and advices. |
| 2016-08-08 13:35:07 -0500 | edited answer | ros_databases Thank you Chrissi for your help. Database works fine but when I am using it with moveit and I call movegroup constructor I got this error Attempt to add global initializer failed, status: DuplicateKey throwSockExcep I had this in my code when I commented it everything works fine so this is the problem After debuging I found mongo::GlobalInitializerRegisterer::GlobalInitializerRegisterer causing problems Database client is my lib and it works fine without Moveit. I was searching internet for solution but I could find anything helpful. I know this is not problem of your package but if you could help my find any solution I would be grateful. Thank you for your answer and help |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
 For better understanding I recommended you to watch this video
For better understanding I recommended you to watch this video