The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-12-06 12:55:32 -0500 | received badge | ● Great Question (source) |
| 2021-07-06 09:19:36 -0500 | received badge | ● Favorite Question (source) |
| 2021-03-11 13:09:53 -0500 | marked best answer | ConstPtr NULL with waitForMessage Hello. I have a function which is supposed to just get one message from a topic, the function looks like this: Whereas PersonList.msg is: And Person.msg something like: Now when I call the function, the behavior is rather erratic. Sometimes I get the correct results for the first call(s) but after some time I get a My program is not crashing, but instead nothing happens, because apparently my pointer is always NULL. Now, the topic is correct, it is published and everything. I have the suspicion that the original pointer is still active and that I can't get hold on it anymore after returning.
Can someone help me what to do? I am not very familliar with those |
| 2019-06-30 04:59:44 -0500 | received badge | ● Good Question (source) |
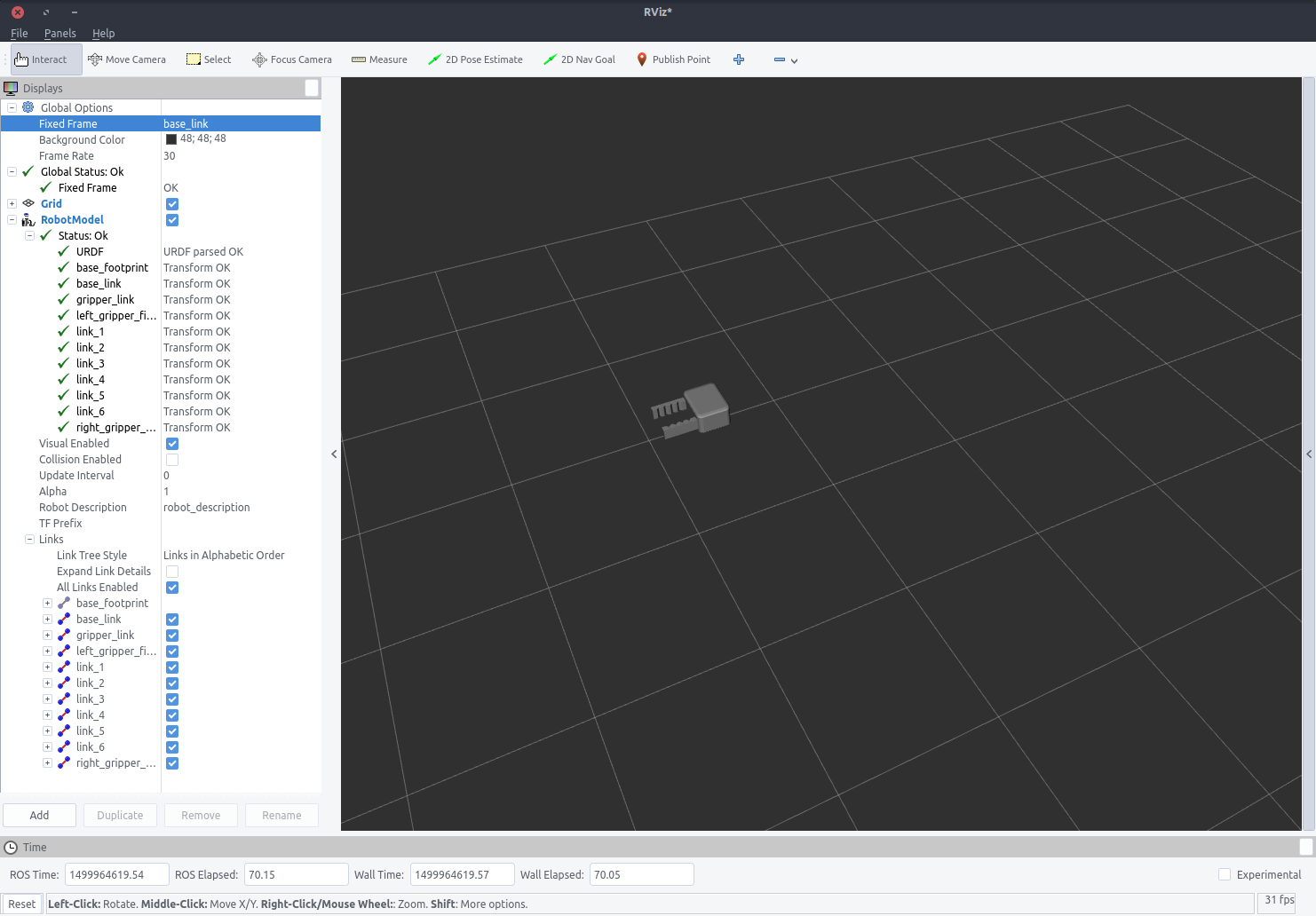
| 2019-02-04 22:49:09 -0500 | marked best answer | Robot model not showing in rviz I am trying to work with this repository: https://github.com/udacity/RoboND-Kin... I did all the initial steps that are mentioned in the repo but have troubles showing the robot urdf in rviz. Since the people over there can't help I hope that someone here can point me in the right direction. When I just want to load the urdf in rviz like this (in individual shells): I just see the gripper. You can see this in the first photo attached. The urdf to me looks fine and there are no errors anywhere. When I run the whole demo, like this:
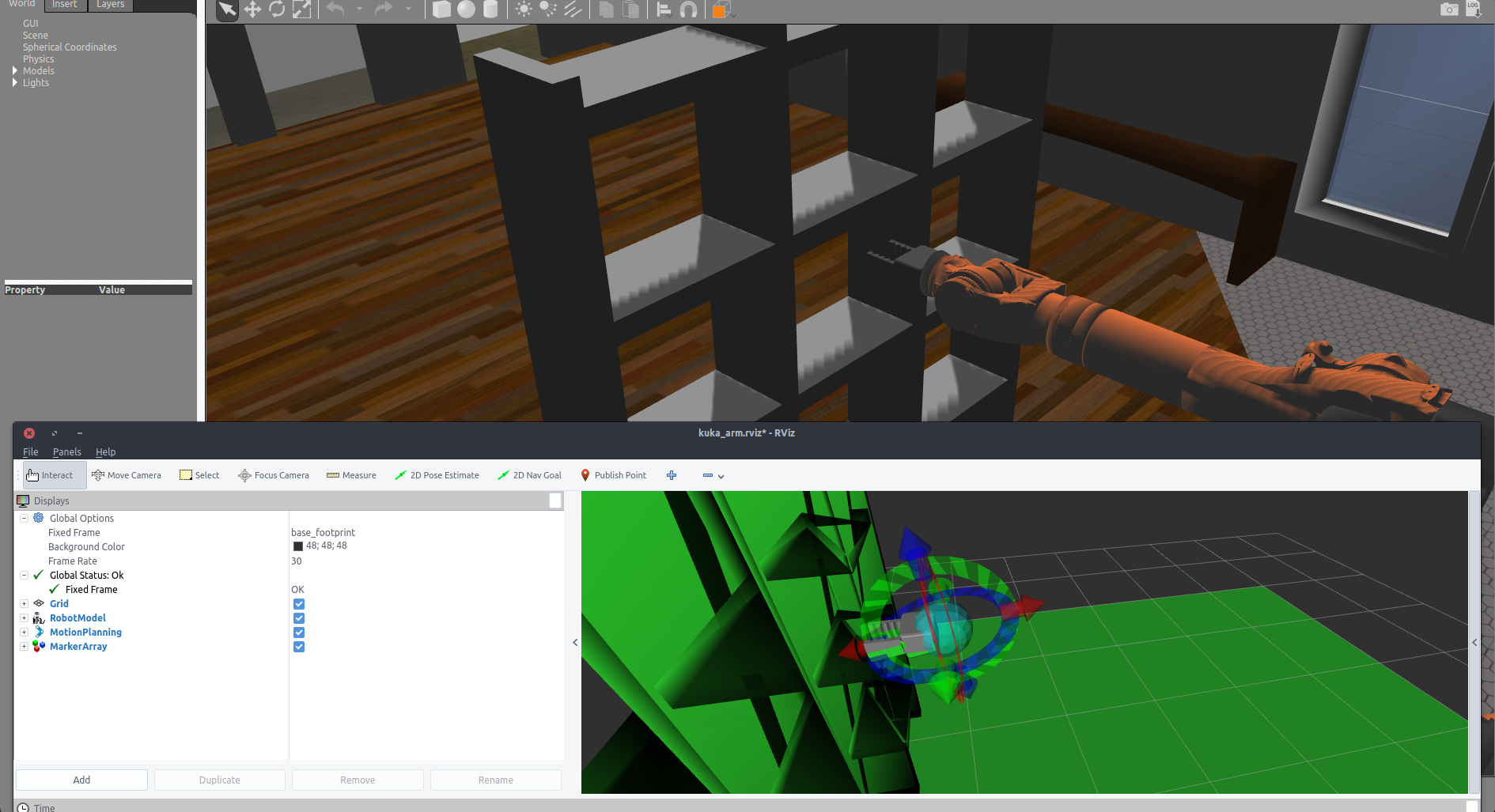
I can verify that the model is correctly loaded in gazebo as you can see in the second screenshot. I tried this on two computers, one in a VM, one natively and with integrated graphics and dedicated nvidia card. Can anyone else please check the urdf and help me out in determining what the problem here is?
|
| 2018-10-08 05:51:18 -0500 | asked a question | Robot code from theory to practice Robot code from theory to practice Hi there, I have a more general question about robot software. There are probably RO |
| 2018-08-08 01:40:12 -0500 | marked best answer | What are ROS projects to practice? Hello, I am using ROS on and off on average every 6 months. To stay active however, I would like to do more projects in ROS and do more advanced stuff (since I always go back after a long break, I most often do rudimentary IPC things, not much with RVIZ, etc.). So I wanted to know if you guys can recommend ROS projects that one can do to practice. Something like these projects of this upcoming course: https://www.udacity.com/course/roboti... But without grading and free. Basically I am looking for advanced tutorials beyond what the wiki offers or something like the Kaggle challenges for ROS. I wouldn't even be opposed if you can refer me to a book that contains this. But I think all the ROS books around are either obsolete and/or very basic. |
| 2018-07-01 23:30:00 -0500 | marked best answer | Publish to topic via launch file Is it possible to publish to a topic with a custom message type from within a launch file? In a launch-file I launch several robots from external packages which I want to register to my running platform as they are launched. |
| 2018-04-27 14:09:44 -0500 | marked best answer | How to subscribe to a topic, while publishing to another Hey guys, I want to write a basic controller for a quadrotor. For a target_position it should take the current_position from a simulated quadrotor, calculate an error between the two and send the command to the quadrotor to go to the position. The current position is a topic of type PoseStamped. (/ground_truth_to_tf/pose). The topic to control the velocity is of type Twist (/cmd_vel). My idea was: I subscribe to the current_position, and if the error is bigger than some threshold, I correct the movement. So, in the callback of the current_position topic, I want to publish a newly corrected velocity. But here is the problem: I only want to publish one message, but on every callback from my subscription. I can't however only send one message, so I am stuck. The code would look something like this: So my question is, how can I do this loop? I only use basic ros stuff, this can't be that hard? //Edit: To clarify: I want to make the velocity of the quadrotor dependant on it's current position. (I want to scale the velocity with a function that smoothly lowers the velocity as the quadrotor approaches the target). So I thought about invoking the velocity-update on the callback of the position: But, when I do this for the first time, my publish call never terminates, so I am stuck with: My question is: How would this be done in general? Is my approach the right one?
I don't know how to escape the publish part. As I understand it, it sends messages to the topic until it is terminated by the user or via There is a 5 year old question on ros.answers on how to send only one message to a topic, but it seems that there is no straight forward approach to do this. So, how would this be done? |
| 2018-01-11 12:23:12 -0500 | received badge | ● Famous Question (source) |
| 2017-12-29 10:11:04 -0500 | received badge | ● Famous Question (source) |
| 2017-10-25 14:30:51 -0500 | received badge | ● Nice Question (source) |
| 2017-08-08 20:22:07 -0500 | received badge | ● Famous Question (source) |
| 2017-07-28 02:59:40 -0500 | received badge | ● Famous Question (source) |
| 2017-07-16 08:09:02 -0500 | received badge | ● Notable Question (source) |
| 2017-07-13 21:20:52 -0500 | received badge | ● Popular Question (source) |
| 2017-07-13 12:37:11 -0500 | commented question | Robot model not showing in rviz I set up everything like it says in the readme on both. And it is not showing on either. |
| 2017-07-13 12:10:22 -0500 | asked a question | Robot model not showing in rviz Robot model not showing in rviz I am trying to work with this repository: https://github.com/udacity/RoboND-Kinematics-P |
| 2017-07-06 09:54:02 -0500 | edited question | ROS installation with Intel Braswell CPU (udoo)? ROS installation with Intel Braswell CPU (udoo)? Hello, I would like to use a fast single board computer for ROS and am |
| 2017-07-06 07:02:41 -0500 | edited question | ROS installation with Intel Braswell CPU (udoo)? ROS installation on udoo? Hello, I would like to use a fast single board computer for ROS and am very intrigued by udoo |
| 2017-07-06 07:02:38 -0500 | edited question | ROS installation with Intel Braswell CPU (udoo)? ROS installation on udoo? Hello, I would like to use a fast single board computer for ROS and am very intrigued by udoo |
| 2017-07-06 05:30:50 -0500 | asked a question | ROS installation with Intel Braswell CPU (udoo)? ROS installation on udoo? Hello, I would like to use a fast single board computer for ROS and am very intrigued by udoo |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.