The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-03-03 02:54:42 -0500 | commented answer | ERROR : ROS2 RUN package not found Opening a new terminal did the trick for me! |
| 2022-06-08 08:13:30 -0500 | commented question | Integration Testing: Rostest with non-Catkin Packages (MAVROS and PX4) @mstampa: No luck so far :( My workaround: Create a test node that publishes dummy data on the same topic as MAVROS. |
| 2022-06-08 08:10:15 -0500 | commented answer | tf.getYaw() in python? Beware that this function expects a list of values, not a geometry_msgs/Quaternion! So, if you have a geometry_msgs/Pose |
| 2022-03-24 08:50:02 -0500 | answered a question | Getting current State of the system using Flexbe Check out this PR on GitHub: https://github.com/team-vigir/flexbe_behavior_engine/pull/161 |
| 2022-02-11 07:54:23 -0500 | answered a question | ros::Time::isValid doesn't do what we think it does? As the answer by @gvdhoorn pointed out, isValid is a static function and not related to your time instance. To get the |
| 2021-12-14 02:05:19 -0500 | received badge | ● Famous Question (source) |
| 2021-12-14 02:05:19 -0500 | received badge | ● Notable Question (source) |
| 2021-12-14 02:05:19 -0500 | received badge | ● Popular Question (source) |
| 2021-11-03 01:29:50 -0500 | received badge | ● Self-Learner (source) |
| 2021-10-27 03:50:35 -0500 | received badge | ● Supporter (source) |
| 2021-10-11 02:19:34 -0500 | edited question | Integration Testing: Rostest with non-Catkin Packages (MAVROS and PX4) rostest with MAVROS and PX4 I am trying to run an integration test of a ROS node I wrote that relies on MAVROS. So I cr |
| 2021-10-08 06:27:28 -0500 | received badge | ● Organizer (source) |
| 2021-10-08 06:25:35 -0500 | edited question | Integration Testing: Rostest with non-Catkin Packages (MAVROS and PX4) rostest with MAVROS and PX4 I am trying to run an integration test of a ROS node I wrote that relies on MAVROS. So I cr |
| 2021-10-08 06:25:04 -0500 | asked a question | Integration Testing: Rostest with non-Catkin Packages (MAVROS and PX4) rostest with MAVROS and PX4 I am trying to run an integration test of a ROS node I wrote that relies on MAVROS. So I cr |
| 2021-10-06 02:42:15 -0500 | answered a question | How to specify dependencies with "foo_msgs" catkin packages As the other answers already state, you need to add the correct dependencies in the CMakeLists.txt. However, I found I a |
| 2021-01-13 03:05:55 -0500 | answered a question | ROS on Manjaro Kind of old question but how about intalling it from AUR: https://wiki.archlinux.org/index.php/ROS Otherwise, there are |
| 2020-06-07 07:46:32 -0500 | commented answer | Local costmap has large drift, why? @femitof: Se my updated answer. |
| 2020-06-07 07:45:58 -0500 | edited answer | Local costmap has large drift, why? It was just a problem with the map_server/resolution parameter. It did not match the resolution of the stage simulator. |
| 2020-02-07 08:24:16 -0500 | received badge | ● Critic (source) |
| 2018-02-19 10:13:03 -0500 | marked best answer | allow_unknown parameter ignored Hi there, I want to avoid the global planner to plan its paths through the unknown because it is not working for my case. So as described here I set the paramter allow_unknown to false. So I created a yaml named global_planner.yaml file like this: In the launch file for the move_base node I added a line to load the parameters: The parameter also shows up in the parameter server: returns false, as expected. So, whats wrong here??? Thanks for any help! Micha UPDATE: I just pulled the navigation package from github to do some tests with the code. I realized the parameter is read just fine! The path planner still plans its path through unknown! Why?? |
| 2018-02-19 10:06:47 -0500 | received badge | ● Student (source) |
| 2016-06-07 19:26:19 -0500 | received badge | ● Famous Question (source) |
| 2016-02-10 17:30:30 -0500 | received badge | ● Famous Question (source) |
| 2015-11-20 08:10:40 -0500 | answered a question | Multi-robot exploration with explorer and adhoc_communication? Hi, I'm running the configuration with the launch files I attached. Give it a try and let me know if it works for you. Regards, Micha master.launch which starts everything needed: |
| 2015-10-20 04:01:26 -0500 | received badge | ● Notable Question (source) |
| 2015-10-06 10:02:03 -0500 | received badge | ● Notable Question (source) |
| 2015-10-06 10:01:15 -0500 | answered a question | Local costmap has unknown space where no obstacle in laser range Once again, I answer myself: The solution is to unset the following parameter for the local costmap: For the global costmap the parameter is still true though. |
| 2015-10-06 05:59:10 -0500 | received badge | ● Popular Question (source) |
| 2015-10-06 05:58:57 -0500 | received badge | ● Enthusiast |
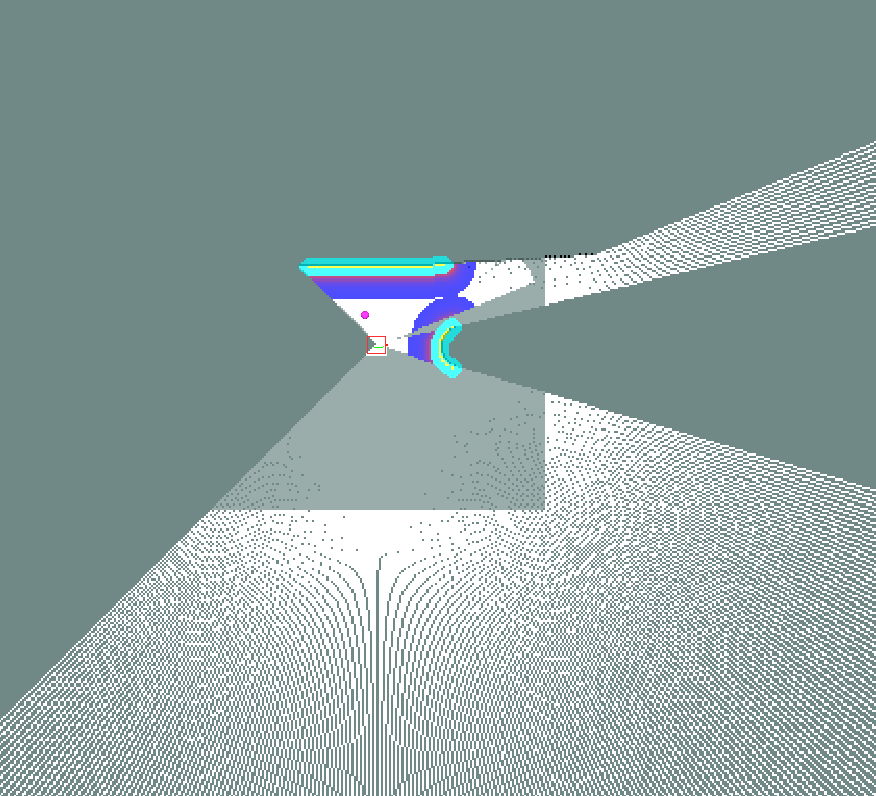
| 2015-10-05 08:19:43 -0500 | asked a question | Local costmap has unknown space where no obstacle in laser range Hi,
in my simulations the local costmap has unknown space for directions where there is no obstacle, see image:
I think it should be the same or a similar problem described here: http://answers.ros.org/question/19017... How do I fix this? The other thread also offers no clear solution. Thanks, Micha |
| 2015-08-25 06:49:36 -0500 | received badge | ● Self-Learner (source) |
| 2015-08-25 06:49:36 -0500 | received badge | ● Teacher (source) |
| 2015-08-24 08:21:59 -0500 | received badge | ● Famous Question (source) |
| 2015-08-24 08:12:37 -0500 | commented question | Local costmap has large drift, why? Connecting the costmap with itself over the footprint topic was just wrong. Thats why it messed up so much. |
| 2015-08-24 07:37:09 -0500 | received badge | ● Scholar (source) |
| 2015-08-24 07:27:45 -0500 | answered a question | Local costmap has large drift, why? It was just a problem with the map_server/resolution parameter. It did not match the resolution of the stage simulator. So basically I had to change the size in the world file for stage so it matches the resolution of the map server (I guess the other way around it would have also been possible). Thanks for the help anyways! EDIT: In the stage world file you specify the underlying bitmap like this: where the size is given in meters (e.g. width 100 m, height 200 m). The corresponding bitmap file should have a number of pixels that results in a resolution you specify in the map server. For example, if your bitmap is 2000 pixel wide and 4000 pixel high, the resolution parameter of the map server must be 0.05 (i.e. 1 m = 20 px). |
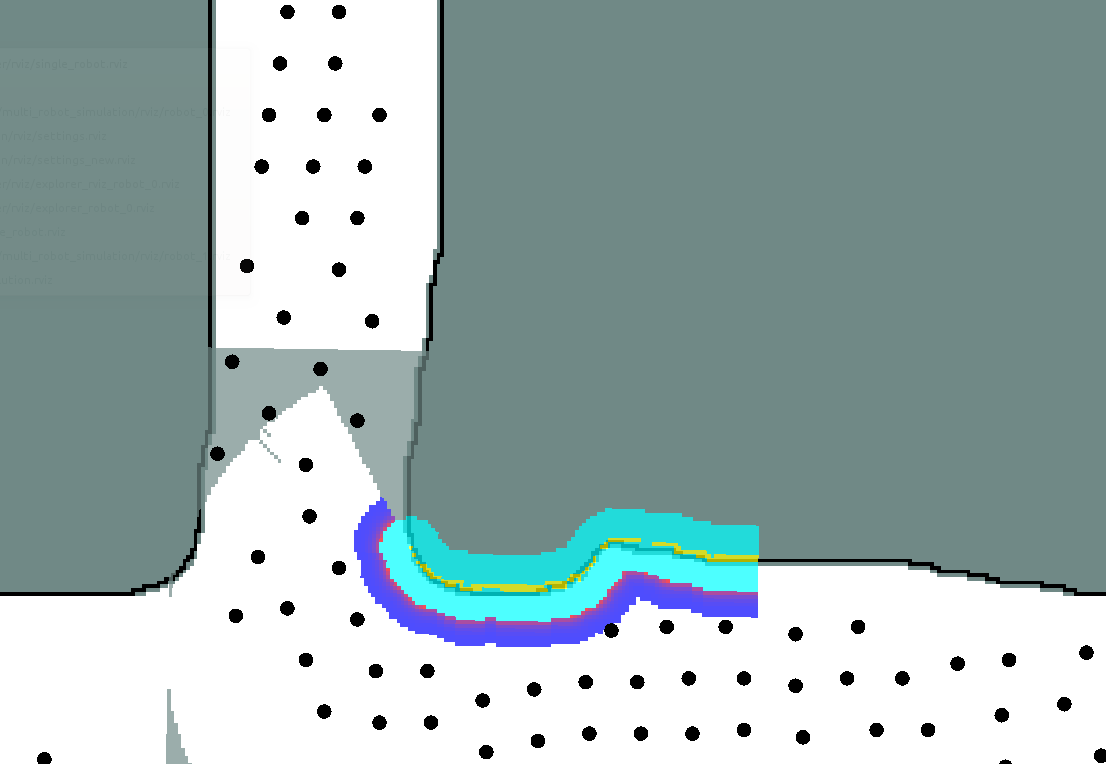
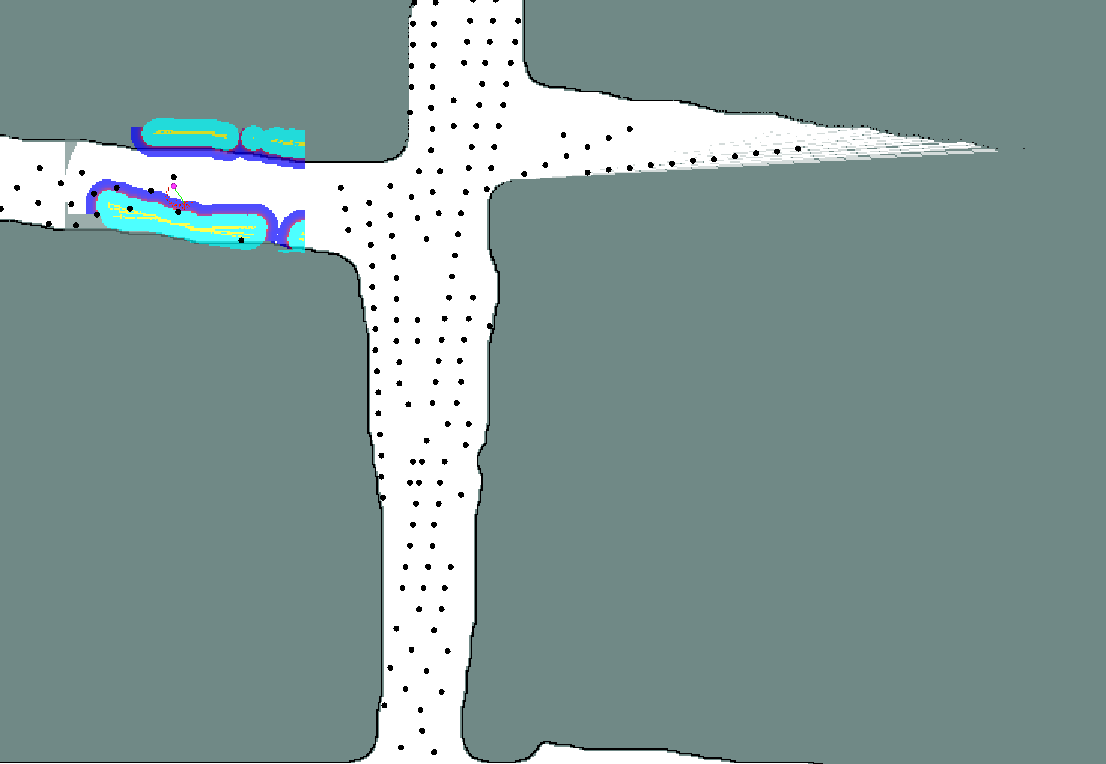
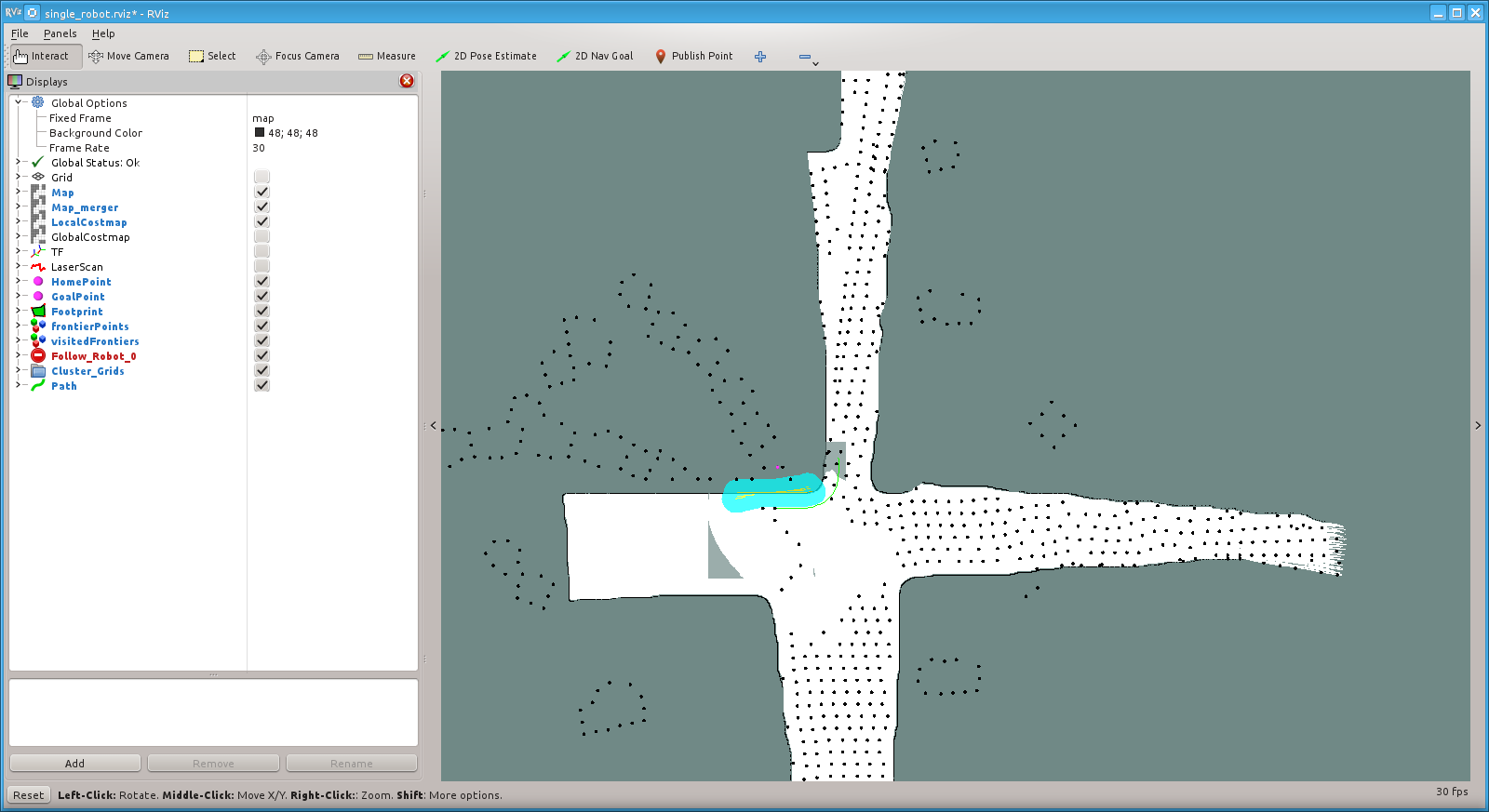
| 2015-08-22 10:01:29 -0500 | edited question | Local costmap has large drift, why? I want to test out an exploration node and want to avoid errors in mapping and localization. Therefore I have replaced gmapping by the fake_localization node and a modified version of the map_server node. In the map_server I publish only the parts of the map where the robot has been. This computation is based on the localization of the fake_localization node and implements ray tracing to emulate a laser scanner. EDIT: I did not experience the drift of the local map with gmapping! Now I'm experiencing a large drift in the local costmap (see images). The first image was taken right after the start, the second just a minute later. Any Ideas what could be wrong here?
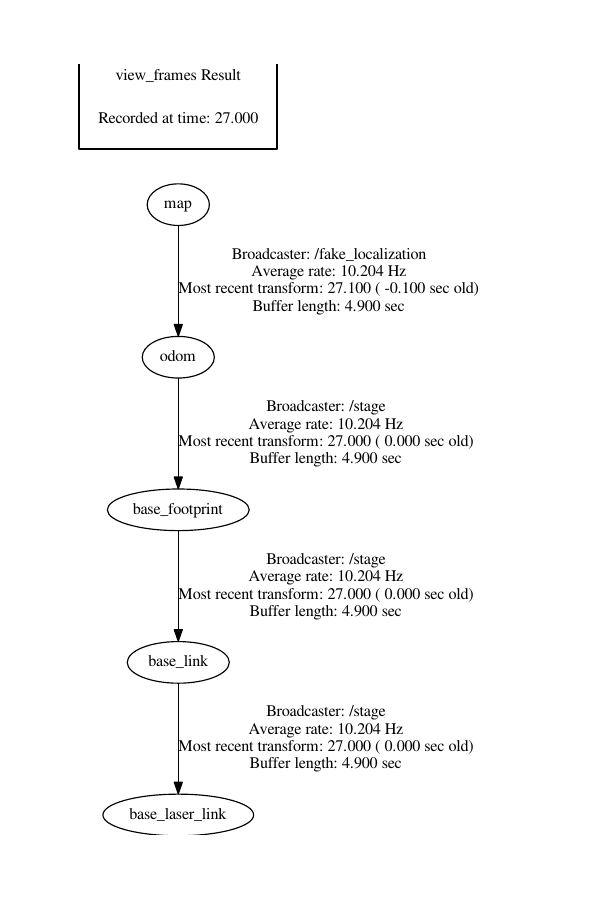
The costmap setup is as follows: Common costmap parameters: Global costmap parameters: Local costmap parameters: The TF transforms in RVIZ look completely wrong, maybe its just a displaying issue. It is static all the time, not moving together with the robot. At the lower end of the transform axis there is map and odom, on the upper end there is base_link, base_laser_link and base_footprint.
The frames look like this:
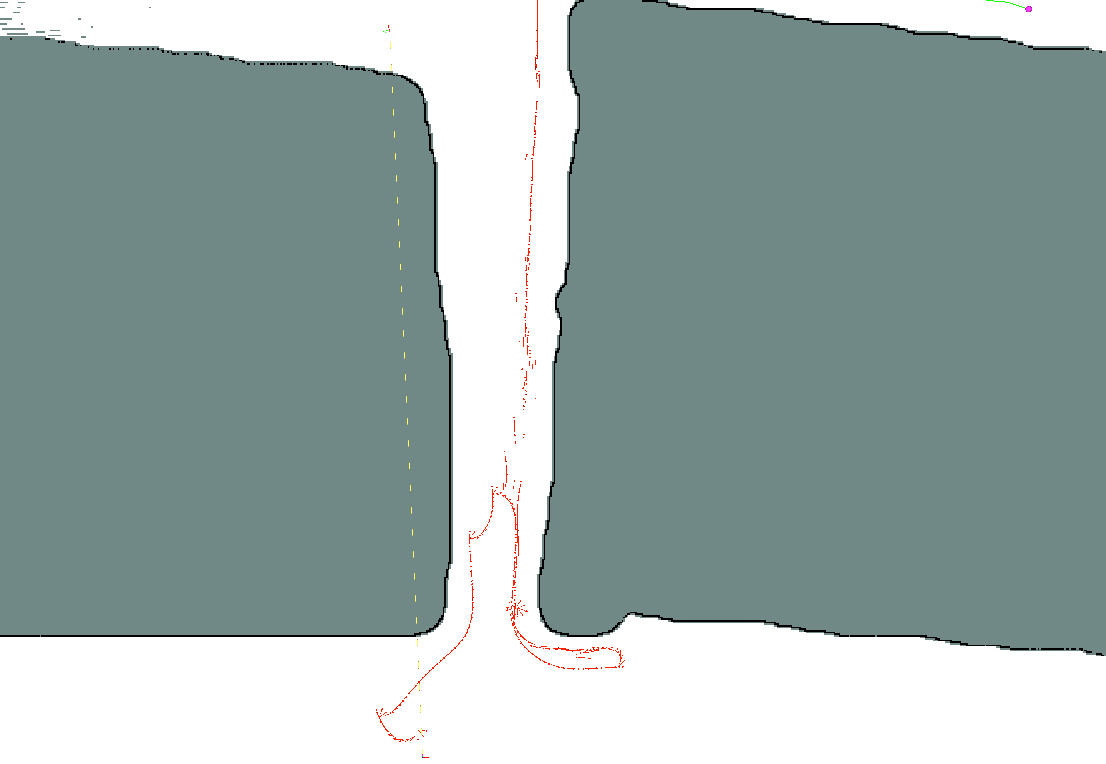
UPDATE: Using roswtf I figured out that the message types of the robot footprint publisher and subscriber in the costmap did not match. I fixed this in the costmap_2d_ros.cpp in the costmap_2d node. Luckily the tf transforms are now correctly displayed in rviz but I get strange errors now. All the frontier points are now way off and I don't know why.
|
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.