The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-06-04 20:11:28 -0500 | received badge | ● Great Question (source) |
| 2019-05-24 06:55:33 -0500 | received badge | ● Good Question (source) |
| 2018-06-29 10:58:54 -0500 | received badge | ● Nice Question (source) |
| 2018-01-30 06:05:05 -0500 | marked best answer | How launch a python script with roslaunch Hello there, I am trying to launch a script called mtnode.py from a package called xsens_drive. When I use rosrun it works perfectly, however i have difficulty to launch it with roslaunch. This is the syntax that I use: and this is the warning and error form the roslaunch: and the error: I tried different combination of name and type without .py with no luck, I am using ros indigo Thanks in advance |
| 2018-01-26 10:17:40 -0500 | marked best answer | Using Openni library without a kinect Dear folks, Is there a way to use openni libraries and packages with no Kinect but a tilting laser scanner instead? I am creating a 3D point cloud with the laser scanner. Thank you in advance |
| 2018-01-26 10:16:53 -0500 | received badge | ● Famous Question (source) |
| 2017-08-28 07:20:22 -0500 | received badge | ● Nice Question (source) |
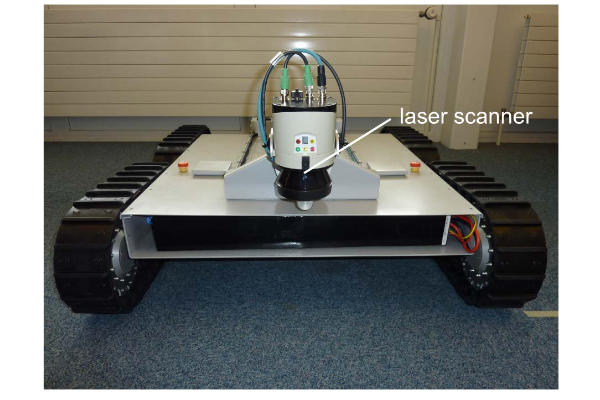
| 2017-05-16 19:30:39 -0500 | marked best answer | Navigation stack hits obstacles Hello guys, I am trying to run my robot with navigation stack. It is a four track differential robot as it is shown in the picture below. I am using gmapping instead of amcl so I will discover and update the map as I go along.
The problem is my robot does not avoid obstacles. As can be seen in these two videos (video 1, video 2) although the obstacle is observed by the laser, local planner is not changing the directory in a way to go around it and instead simply drives through it. The obstacle is not part of the map and i set it up in a way that it appears to the rover when it rotates to reach the way point. In other words my global planner seems to be working fine, since it does not know about the obstacle. here is my yaml files: cost_map common parameters local_costmap_params global_costmap_params base_local_planner_params any idea how to address the problem? Thank you very much in advance Edit: Here is my launch files: My first launch file which launches the laser scanner, my joystick node, my tf_setup node, point cloud creator out of laser scanner (This one i put to perhaps solve the problem and it didn't make any changes), and my odometry. (For some technical reasons I can communicate with the robot only in one node, so setting up the speeds from cmd_vel and also providing the odometry information are being done in rover_odom node) rovmap.launch My second launch file which simply launches gmapping node gmap.launch and finally my move_base.launch, note that amcl is commented since I am using gmapping. Although I tested also with amcl instead of gmapping and it was the same, not avoiding obstacles ... (more) |
| 2017-05-01 10:25:09 -0500 | received badge | ● Nice Answer (source) |
| 2017-04-30 02:59:46 -0500 | marked best answer | Difficulty to use Laser scanner with URG_NODE Hello, I am trying to get data from a hokuyo laser scanner model (UTM_30LX_EW). I have installed urg_node and all the related dependencies. To check the installation and following the urg_node page in ROS wiki, I run this code: rosrun hokuyo_node getID /dev/ttyUSB0 and I get "Error: package 'hokuyo_node' not found". I tried to also install the hokuyo_node, but the cat_make failed. I should add my device does not show up on ttyACM0 but on the ttyUSB0. That's why I changed the code accordingly. Although, I guess that will cause some problems as well, so if you know how to make the device to be appeared as ttyACM0 instead of ttyUSB0 please let me know. Thank you for your help |
| 2017-04-28 05:19:37 -0500 | commented question | Map not being built using gmapping with depthimage_to_laserscan Gmapping relays on odometry, if you don't have odomery data I recommend you to try hector slam. To my experience it work |
| 2017-04-28 05:19:15 -0500 | commented question | Map not being built using gmapping with depthimage_to_laserscan Gmapping relays on odometry, if you don't have odomery data I recommend you to try hector mapping. To my experience it w |
| 2017-04-23 17:00:13 -0500 | commented question | How to relate the variation of force on an axis as a function of time to obtain the variation of the position Dynamic equation of your system?! F = m d^x/dt^2, depending on your system, springs, masses etc you need to derive it. A |
| 2017-04-23 16:06:13 -0500 | answered a question | Wrap external library as catkin package You can take a look at this example of one of my packages. Where I create a library "costmap2d" out of my source files c |
| 2017-04-23 13:39:18 -0500 | commented question | Wrap external library as catkin package Do you have the source code? lib.cpp and lib.h files |
| 2017-04-23 13:39:05 -0500 | commented question | Wrap external library as catkin package Do you have the source code? |
| 2017-04-23 13:35:39 -0500 | commented question | Map not being built using gmapping with depthimage_to_laserscan You are not publishing what depthimage_to_laserscan needs to subscribe. check the package documentation. you need a imag |
| 2017-04-23 13:24:57 -0500 | commented question | New problem linking OpenCV Indigo Cplusplus node Please add your CMakeList.txt so people can help you. |
| 2017-04-21 05:38:10 -0500 | answered a question | node crashes after rosrun !! Instead of rosrun Use gdb to find the point in which your node is crashing. gdb ~/(catkin_ws)/devel/lib/(pkg_name)/(ex |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.