The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-10-28 22:54:55 -0500 | received badge | ● Taxonomist |
| 2018-09-19 14:26:35 -0500 | marked best answer | Connect Rtabmap on Tango to ROS Hi, @matlabbe, I am using Rtabmap application on Tango. I would like to connect the tablet to ROS indigo on my laptop. I followed the instructions on this link. But, I get some errors when I do catkin_make in ROS Java Android workspace section. Would you please help me how to connect it properly? Is there another way to read the data from Rtabmap app on ROS? Thank you. |
| 2017-10-05 12:00:52 -0500 | marked best answer | /imu: VN: Permission denied Hello, I am trying to connect an imu VN-100 Rugged to ROS via this package. But, I get the following output in my terminal: I tried to change the baud rate of /dev/ttyUSB0 to something else according to the acceptable baud rates in this link. However, I get the same result each time. Does anyone know how I can solve this problem. Thank you. |
| 2017-10-05 12:00:16 -0500 | received badge | ● Notable Question (source) |
| 2017-10-05 12:00:16 -0500 | received badge | ● Famous Question (source) |
| 2017-01-10 13:21:21 -0500 | received badge | ● Famous Question (source) |
| 2017-01-03 16:48:54 -0500 | received badge | ● Famous Question (source) |
| 2016-12-05 22:18:28 -0500 | marked best answer | pan_tilt_port: No motors found + Dynamixel MX-64AR Hello, I have attached a dynamixel motor MX-64AR via USB to my laptop. The distro of my ROS is indigo running of Ubuntu 14.04. I looked into other answers, but I couldn't solve my problem. When I run the following launch file: I get the following output in the terminal: Also I did : dmesg | grep tty and got: Can anyone help me to solve the problem. Do I need to add more information in the launch file? Thank you. |
| 2016-12-05 22:17:59 -0500 | received badge | ● Nice Question (source) |
| 2016-12-05 22:17:56 -0500 | received badge | ● Famous Question (source) |
| 2016-10-31 00:56:19 -0500 | received badge | ● Notable Question (source) |
| 2016-09-14 08:37:44 -0500 | commented question | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization @matthewlefort I just modified the code to add the covariance matrix. |
| 2016-09-13 04:10:38 -0500 | commented question | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization I put the launch files here. I will add some plots to the question for the outputs. |
| 2016-09-13 03:49:33 -0500 | commented question | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization If I use NED, is it making a problem? |
| 2016-09-13 03:49:10 -0500 | commented question | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization @Tom Moore For the IMU I am using this driver on Ubuntu 14.04 with ROS indigo. Similar to the picture in the question, I put the IMU on top of the vision sensor. I tried to use ENU frame, but the positive direction for the IMU is NED |
| 2016-09-08 05:19:59 -0500 | commented question | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization @Tom Moore would you please give me some hints on my question. Thank you. |
| 2016-09-08 05:17:09 -0500 | received badge | ● Famous Question (source) |
| 2016-09-01 16:22:31 -0500 | commented answer | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization I set the covariance to some values, but it is still the same. |
| 2016-09-01 10:50:47 -0500 | commented answer | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization Thanks I will try to set the covariance in the imu. The drifting is both in orientation and position. Maybe the problem has to do with the covariance. |
| 2016-09-01 08:40:18 -0500 | commented answer | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization I am using the config as here. I will put the output of the imu in the question. |
| 2016-09-01 07:58:48 -0500 | commented answer | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization @matlabbe I changed the axis of the imu by rotating imu on the camera similar to the picture you have. Also, I added base_link similar to what I have written in my question, but still I don't know why I don't get the correct answer. It has lots of drifts. |
| 2016-08-29 02:29:26 -0500 | received badge | ● Notable Question (source) |
| 2016-08-27 12:12:22 -0500 | commented answer | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization @matlabbe Thank you for your answer. When I do the same thing as you described I get the following warning: |
| 2016-08-27 02:53:57 -0500 | received badge | ● Popular Question (source) |
| 2016-08-25 07:00:43 -0500 | asked a question | Sensor fusion of IMU and ASUS for RTAB-MAP with robot_localization Hi, @matlabbe, I have ASUS xtion pro live and vn-100T IMU sensors like the following picture:
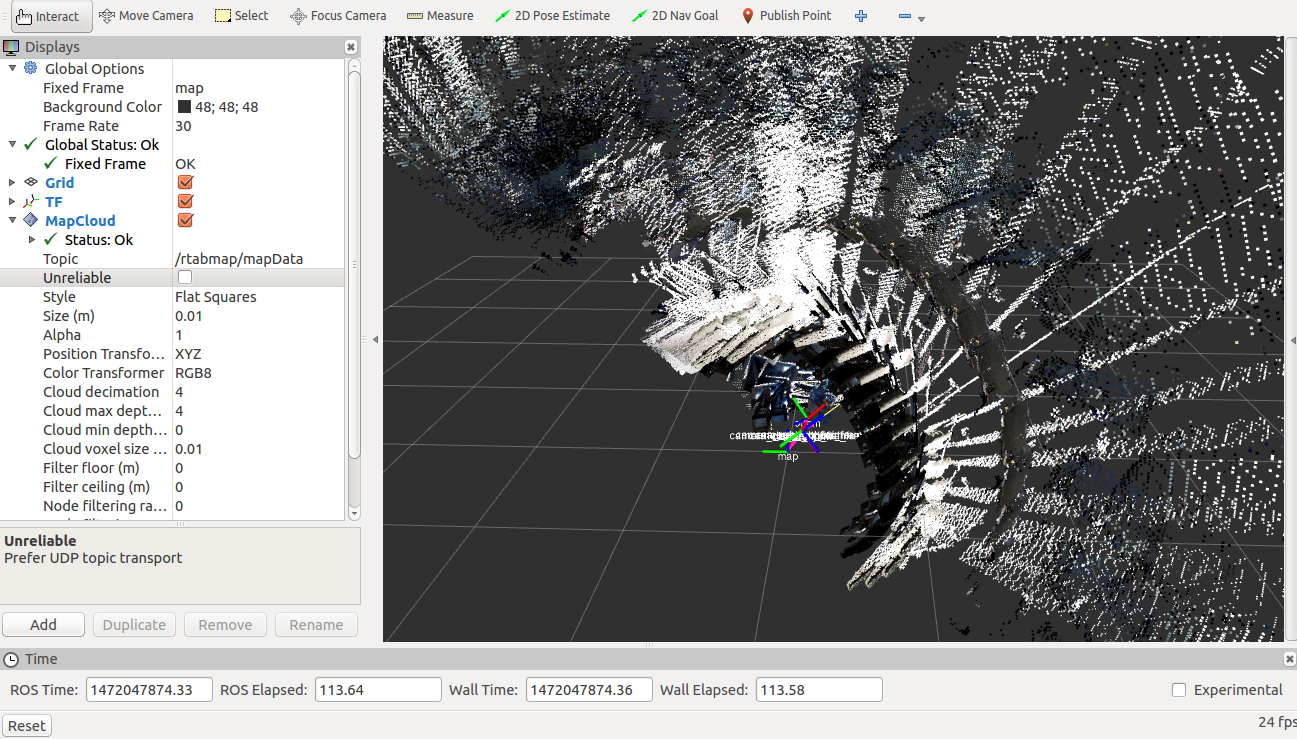
I tried to fuse the data from these two sensors similar to your launch file here with robot_localization. The difference in my launch file is that I added the tf relationship as: After I launch it, I get the following result for the map could. In this picture I am not moving sensors at all. It starts to rotate around the view, and the information is not correct.
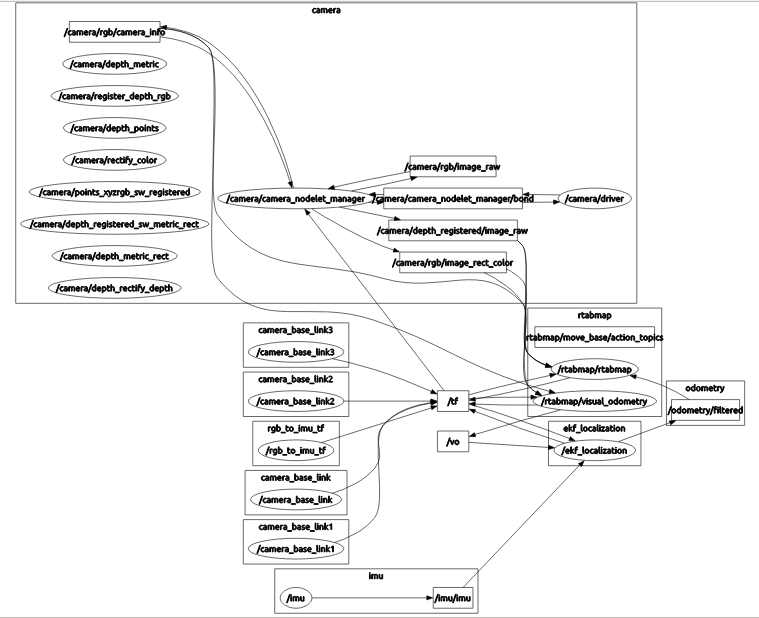
Also, when I move the sensors, the coordinate frames do not move correctly. I read "Preparing your sensor data", but I am not sure if something is wrong with the placement of the IMU or not! Do you think there is a problem with the usage of the tf package? I think the relationship is correct, but I don't know how to remove this drift (or motion) when I don't move the sensors at all. The rqt_graph and tf_frames are like the following:
I also read these two question (1) and (2), but I didn't understand how to solve it. Thank you. Edit:
When I do |
| 2016-08-19 09:40:01 -0500 | commented answer | Using rtabmap on a remote workstation @matlabbe Finally, I can make a map on a remote station. Thanks for your explanation. My problem was related to the WiFi bandwidth. Now, everything is ok. |
| 2016-08-19 09:05:02 -0500 | received badge | ● Notable Question (source) |
| 2016-07-26 10:54:23 -0500 | commented answer | Using rtabmap on a remote workstation Thanks for giving me an example. If I want to save the map on the robot, how is it possible? |
| 2016-07-26 09:52:59 -0500 | commented answer | Using rtabmap on a remote workstation For visualization on pc from |
| 2016-07-26 09:50:46 -0500 | commented answer | Using rtabmap on a remote workstation If I do this on odroid is that sufficient: roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" rviz:=false rtabmapviz:=false |
| 2016-07-26 09:41:36 -0500 | commented answer | Using rtabmap on a remote workstation @matlabbe Thanks for your explanation. Is there any tutorial how to do mapping on the robot? |
| 2016-07-26 02:23:45 -0500 | commented answer | Using rtabmap on a remote workstation I am on WI-FI. Is it possible to have a steady image framerate on wifi? |
| 2016-07-25 11:48:42 -0500 | commented answer | Using rtabmap on a remote workstation Now, on pc as computer B, I can see mapping but it is really really slow so I think I just have something on Rviz from one frame. After that nothing is getting updated. I get an error in terminal: process() RGB-D SLAM mode is enabled and no odometry is provided. Image 21 is ignored! |
| 2016-07-25 11:10:50 -0500 | commented answer | Using rtabmap on a remote workstation So, now instead of a laptop I am considering a pc. There is no difference. I don't know which part I am missing. |
| 2016-07-25 09:43:15 -0500 | commented answer | Using rtabmap on a remote workstation Do you think there is a problem in rqt_graph? |
| 2016-07-25 09:31:42 -0500 | received badge | ● Famous Question (source) |
| 2016-07-25 09:27:08 -0500 | commented answer | Using rtabmap on a remote workstation @matlabbe for rostopic hz /camera/rgb/image_rect_color/theora for both odroid and laptop I get the rate between 8 and 11 for the second one I get something about 18 but sometimes no message is coming for laptop and a rate about 30 on odroid. |
| 2016-07-25 07:44:27 -0500 | commented answer | Using rtabmap on a remote workstation I don't have this node: points_xyzrgb. Do I need it? I see you have it in rqt_graph and also on remote_mapping launch file. |
| 2016-07-25 07:19:11 -0500 | commented answer | Using rtabmap on a remote workstation Is it necessary to have ~500 KiB/s of bandwidth? When I check system monitor on both systems sometimes the bandwidth is less than this value. |
| 2016-07-25 07:07:46 -0500 | commented answer | Using rtabmap on a remote workstation Also, I checked the tutorial here. I don't have a problem with ROP_IP. because I can subscribe to the image topic on my laptop from the Odroid with no problem. |
| 2016-07-25 07:05:41 -0500 | commented answer | Using rtabmap on a remote workstation [ WARN] Save depth data to 16 bits format: depth type detected is 32FC1, use 16UC1 depth format to avoid this conversion (or set parameter "Mem/SaveDepth16Format=false" to use 32bits format). This message is only printed once.. |
| 2016-07-25 07:05:24 -0500 | commented answer | Using rtabmap on a remote workstation I am getting the following warning (is it causing the problem?): [ WARN] rtabmap: Could not get transform from odom to camera_link after 0.200000 seconds (for stamp=1469447469.217299)! |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.