The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2016-08-03 15:23:08 -0500 | received badge | ● Taxonomist |
| 2015-12-04 07:03:17 -0500 | received badge | ● Famous Question (source) |
| 2015-11-03 02:08:01 -0500 | received badge | ● Notable Question (source) |
| 2015-11-02 10:46:13 -0500 | received badge | ● Popular Question (source) |
| 2015-10-30 20:43:36 -0500 | asked a question | realsense_dist runtime error Hello, I'm using Intel Realsense R200 camera and Realsense ROS SDK. When I run realsense_r200_launch.launch, I encountered following error. Any comment would be appreciated. |
| 2015-10-27 18:53:35 -0500 | received badge | ● Notable Question (source) |
| 2015-10-27 18:53:35 -0500 | received badge | ● Famous Question (source) |
| 2015-10-27 18:53:35 -0500 | received badge | ● Popular Question (source) |
| 2015-10-20 19:23:48 -0500 | received badge | ● Scholar (source) |
| 2015-10-20 19:23:41 -0500 | received badge | ● Famous Question (source) |
| 2015-10-15 18:11:02 -0500 | received badge | ● Student (source) |
| 2015-10-07 20:25:18 -0500 | received badge | ● Notable Question (source) |
| 2015-10-07 12:20:23 -0500 | commented question | robot_localization : no filtered odometry with visual odometry Hi Tom, I post sample messages above. |
| 2015-10-07 08:13:12 -0500 | received badge | ● Popular Question (source) |
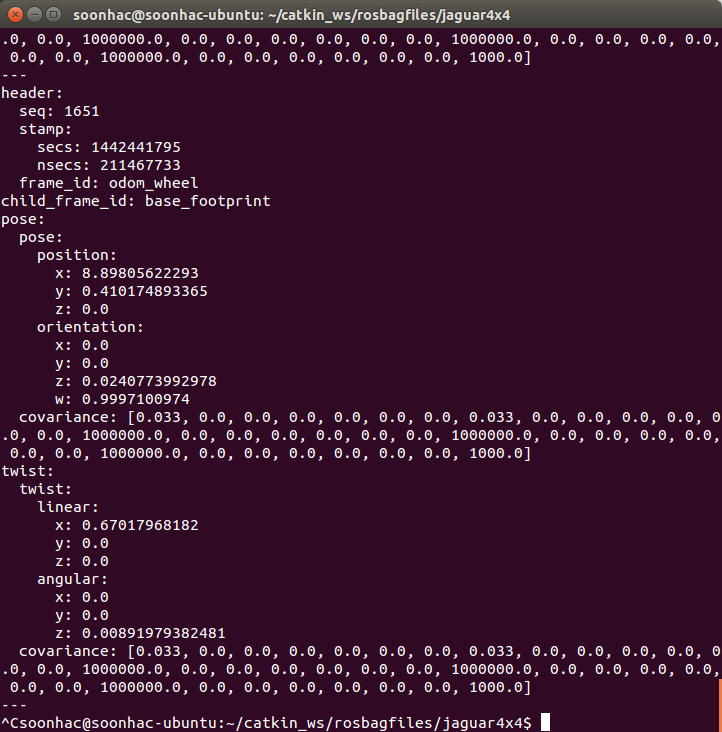
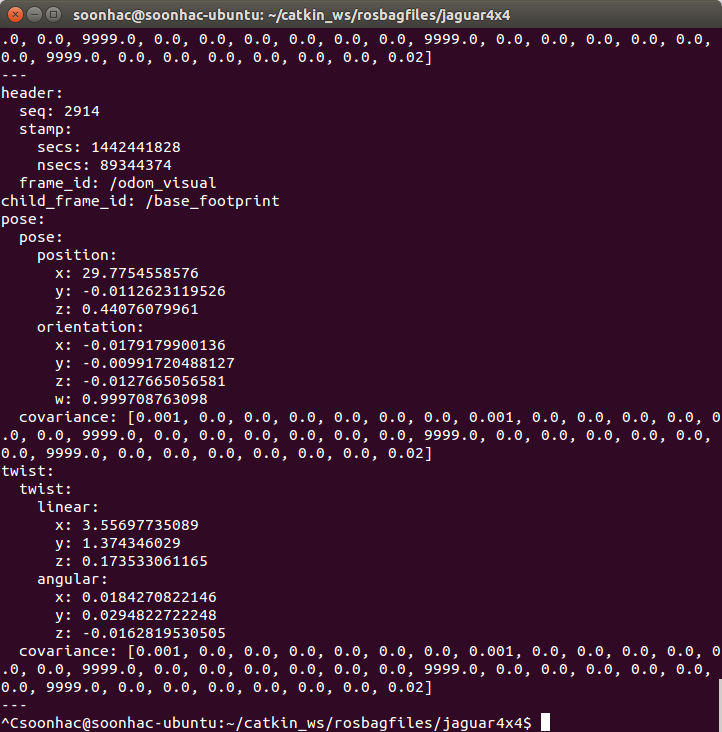
| 2015-10-06 19:19:35 -0500 | asked a question | robot_localization : no filtered odometry with visual odometry Hi, There is no filtered odometry from robot_localization when I put visual odometry as an input. Interesting thing is that robot_localization successfully produces a filtered odometry when I put wheel odometry instead of visual odometry. Both visual odometry and wheel odometry uses same ros message (i.e. nav_msgs/Odometry). The launch file is follows. Any comments would be appreciated. [Example of wheel odometry]
[Example of visual odometry]
|
| 2015-08-12 13:26:07 -0500 | commented answer | tf:TransformTFToEigen() causes 'TransformTFToEigen' is not a member of 'tf' I solved this problem by replacing "TransformTFToEigen" and "TransformEigenToTF" with "transformTFToEigen" and "transformEigenToTF" respectively. Please see https://github.com/tum-vision/dvo/iss... . |
| 2015-08-06 17:26:36 -0500 | commented answer | tf:TransformTFToEigen() causes 'TransformTFToEigen' is not a member of 'tf' I have met the same problem. The header file is included in the code. How can I solve this problem? |
| 2013-11-10 15:15:15 -0500 | received badge | ● Famous Question (source) |
| 2013-08-27 11:44:10 -0500 | received badge | ● Notable Question (source) |
| 2013-08-27 11:44:10 -0500 | received badge | ● Popular Question (source) |
| 2013-02-28 06:06:04 -0500 | asked a question | Sparse Bundle Adjustment Visualization with Rviz I'm trying to follow http://www.ros.org/wiki/sba/Tutorials/PerformingSBAOnDataFromFile (Performing SBA on Data from File). It has been running on ROS Groovy Galapagos on Ubuntu 12.04. In the last part, Visualization with Rviz of the http://www.ros.org/wiki/sba/Tutorials/PerformingSBAOnDataFromFile (Performing SBA on Data from File), Rviz shows strange visualization because landmark points(x,y,z) and camera pose(x,y,z) in the result file have different sign in x values each other. I generated the result file by using writeBundlerFile() after running sparse bundle adjustment with sample_bundler_file.out. This is the some part of the result file. Bundle file v0.35 50 4.3000000000e+02 0.0000000000e+00 0.0000000000e+00 1.0000000000e+00 0.0000000000e+00 0.0000000000e+00 0.0000000000e+00 -1.0000000000e+00 0.0000000000e+00 0.0000000000e+00 0.0000000000e+00 -1.0000000000e+00 0.0000000000e+00 0.0000000000e+00 0.0000000000e+00 // camera pose (x y z) 4.3000000000e+02 0.0000000000e+00 0.0000000000e+00 1.0000000000e+00 -3.6102908617e-10 5.0166716117e-10 -3.6102908484e-10 -1.0000000000e+00 -2.6551691863e-09 5.0166716213e-10 2.6551691861e-09 -1.0000000000e+00 -7.5948160049e-01 1.3820343748e-08 4.6894949497e-09 // camera pose (x y z) 4.3000000000e+02 0.0000000000e+00 0.0000000000e+00 1.0000000000e+00 -3.6583800524e-10 4.3871802303e-10 -3.6583800343e-10 -1.0000000000e+00 -4.1200444567e-09 4.3871802454e-10 4.1200444565e-09 -1.0000000000e+00 -1.5189631969e+00 2.0895044828e-08 8.7468522540e-09 // camera pose (x y z) 4.3000000000e+02 0.0000000000e+00 0.0000000000e+00 1.0000000000e+00 -2.3371397854e-10 2.6513408110e-11 -2.3371397840e-10 -1.0000000000e+00 -5.5546336148e-09 2.6513409408e-11 5.5546336148e-09 -1.0000000000e+00 -2.2784447907e+00 2.7502454777e-08 1.3476074011e-08 // camera pose (x y z) 4.3000000000e+02 0.0000000000e+00 0.0000000000e+00 1.0000000000e+00 6.7231987136e-12 -5.6948044652e-10 6.7231951043e-12 -1.0000000000e+00 -6.3377854254e-09 -5.6948044656e-10 6.3377854254e-09 -1.0000000000e+00 -3.0379263828e+00 3.0655840763e-08 1.7106793080e-08 // camera pose (x y z) 0.2531605326 -0.2531605328 5.063210657 // landmark point (x y z) 255 255 255 5 0 0 21.5 21.5 1 0 -43 21.5 2 0 -107.5 21.5 3 0 -172 21.5 4 0 -236.5 21.5 0.2531605326 -0.7594815976 5.063210654 // landmark point (x y z) 255 255 255 5 0 1 21.5 64.5 1 1 -43 64.5 2 1 -107.5 64.5 3 1 -172 64.5 4 1 -236.5 64.5 0.2531605325 -1.265802662 5.063210651 // landmark point (x y z) 255 255 255 5 0 2 21.5 107.5 1 2 -43 107.5 2 2 -107.5 107.5 3 2 -172 107.5 4 2 -236.5 107.5 0.2531605324 -1.772123726 5.063210648 // landmark point (x y z) 255 255 255 5 0 3 21.5 150.5 1 3 -43 150.5 2 3 -107.5 150.5 3 3 -172 150.5 4 3 -236.5 ... (more) |
| 2012-09-26 21:33:45 -0500 | received badge | ● Popular Question (source) |
| 2012-09-26 21:33:45 -0500 | received badge | ● Notable Question (source) |
| 2012-09-26 21:33:45 -0500 | received badge | ● Famous Question (source) |
| 2011-12-07 03:29:33 -0500 | asked a question | Auto Integraton Time in SwissRanger Hi, I wonder how to implement auto integration time in SR_3D_View of SwissRanger. Even though I looked the API functions, I couldn't find a proper API function. The API includes only SR_GetIntegrationTime() and SR_SetIntegrationTime(). Any comment would be appreciated. Best, Soonhac |
| 2011-04-01 09:22:16 -0500 | answered a question | tod_stub detector running error I solved this issue by installing nvidia-glx-96.^^ Hope it would be helpful. Soonhac |
| 2011-03-02 10:07:38 -0500 | received badge | ● Editor (source) |
| 2011-03-02 10:05:39 -0500 | asked a question | tod_stub detector running error Hi, I encountered the following errors on running the tod_stub. $ rosrun tod_stub detector -B t0001.bag X Error of failed request: BadAccess (attempt to access private resource denied) Major opcode of failed request: 155 (GLX) Minor opcode of failed request: 26 (X_GLXMakeContextCurrent) Serial number of failed request: 72 Current serial number in output stream: 72 Any comment would be appreciated. Thank you, Soonhac |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.