The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-12-01 23:25:39 -0500 | received badge | ● Famous Question (source) |
| 2019-11-29 02:58:56 -0500 | received badge | ● Nice Answer (source) |
| 2019-05-30 02:08:53 -0500 | received badge | ● Popular Question (source) |
| 2019-04-08 01:12:16 -0500 | marked best answer | multiple Laserscanner for Hector Mapping Hello there, I am trying to do hector mapping with two sick s300. They're back to back and with this I have 360° of sight.. so I want to use both laser/scan topics for hector. How can I tell hector to use two topics? I already tried the following:
Is there a better solution to use multiple Laserscanners for hector mapping? pls help, greez felix |
| 2018-05-17 03:14:57 -0500 | received badge | ● Nice Answer (source) |
| 2018-05-10 05:39:29 -0500 | marked best answer | Working with ROS and Robot Arms Hello! I am working for my Bachelor Degree with ROS and I have to setup and implement a Robot System. The final goal is to grab a mug while the robot is driving next to it. Now my question is, since I am not so good with ros right now and I am at the beginning, what packages there exist to use Robot-Arms and which Robot-Arms are supported? Is it possible to solve this Problem with ros? It would be nice if anybody could answer me these questions :) greez |
| 2017-03-19 19:55:43 -0500 | received badge | ● Famous Question (source) |
| 2017-01-11 01:28:20 -0500 | received badge | ● Famous Question (source) |
| 2016-12-31 23:21:19 -0500 | received badge | ● Famous Question (source) |
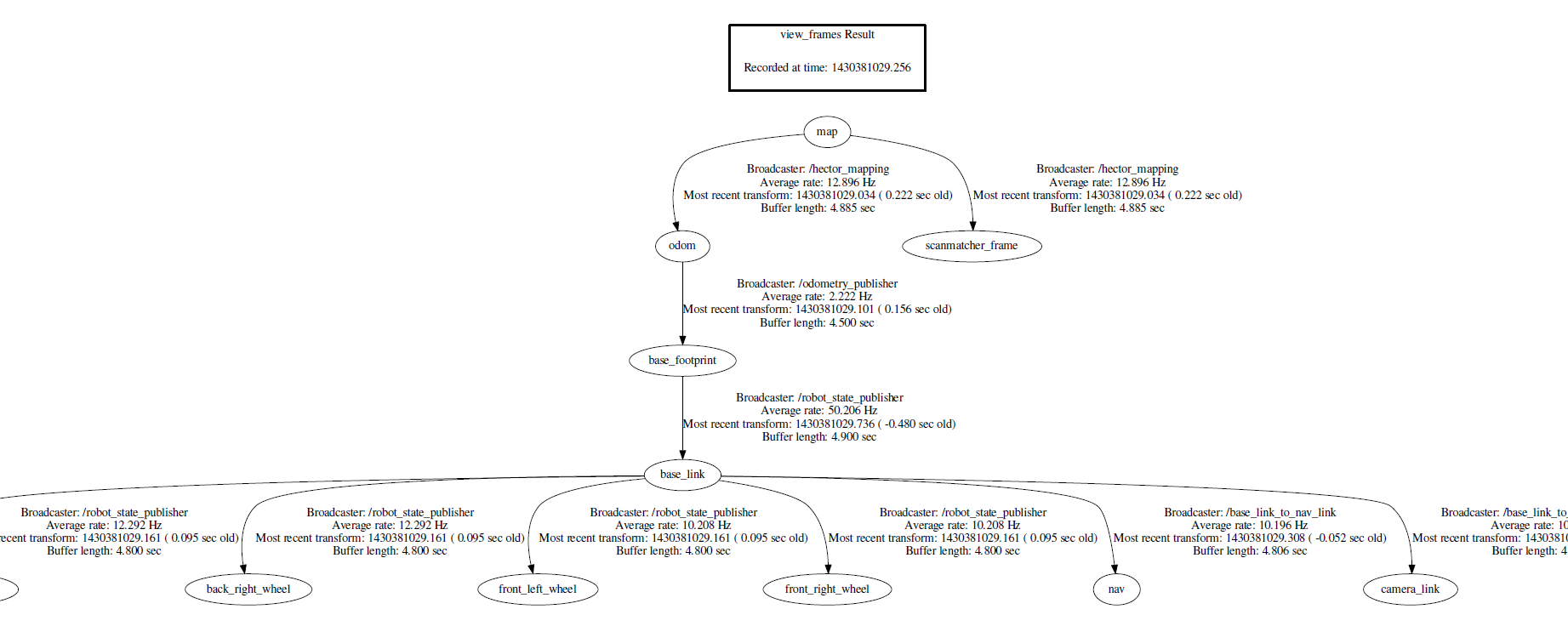
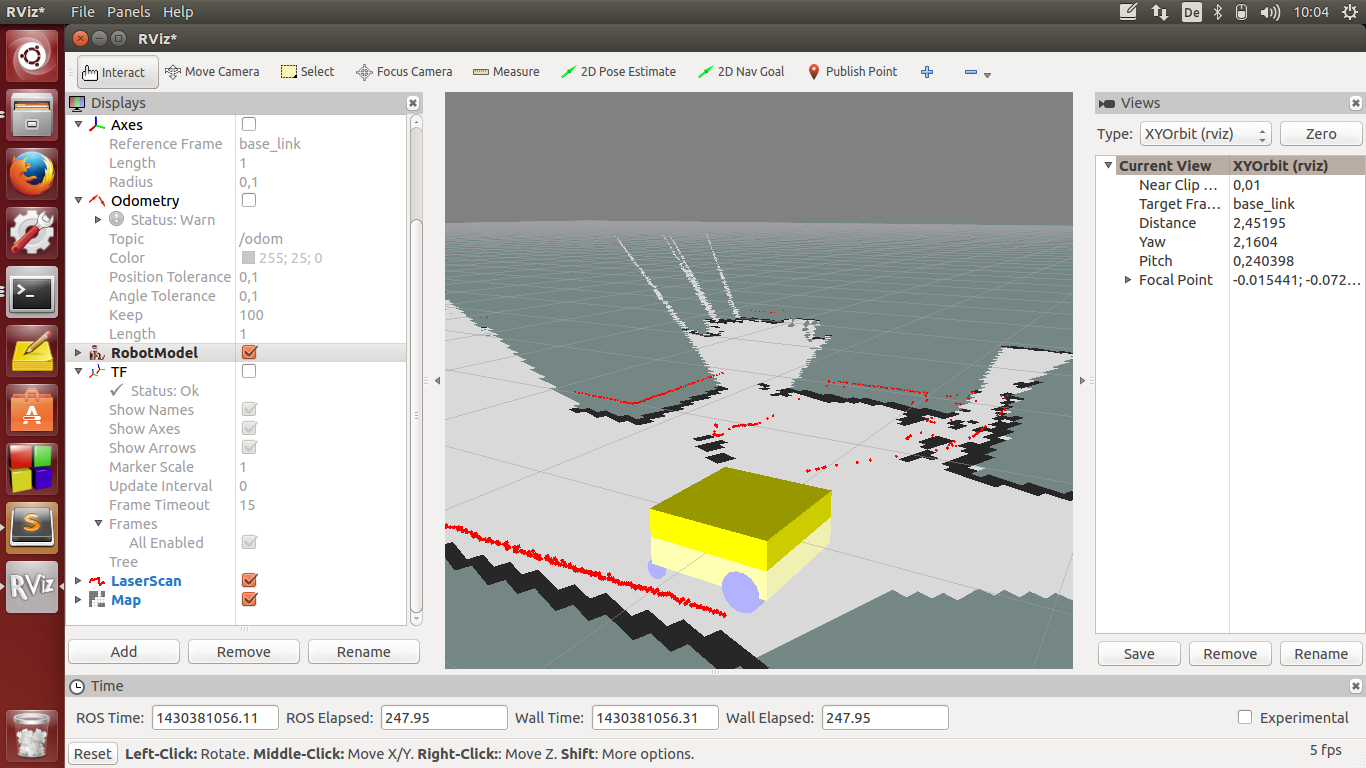
| 2016-10-21 06:29:08 -0500 | marked best answer | AMCL Localization, Drifts when turning Hi people, I am using a differential drive robot with a sick laser scanner. When I am driving him forwards everything is fine but when I start turning the LaserScan doesnt match with the map and it starts drifting. I am only using AMCL and not robot_pose_ekf, do I need to use this? Here is my current tf tree.
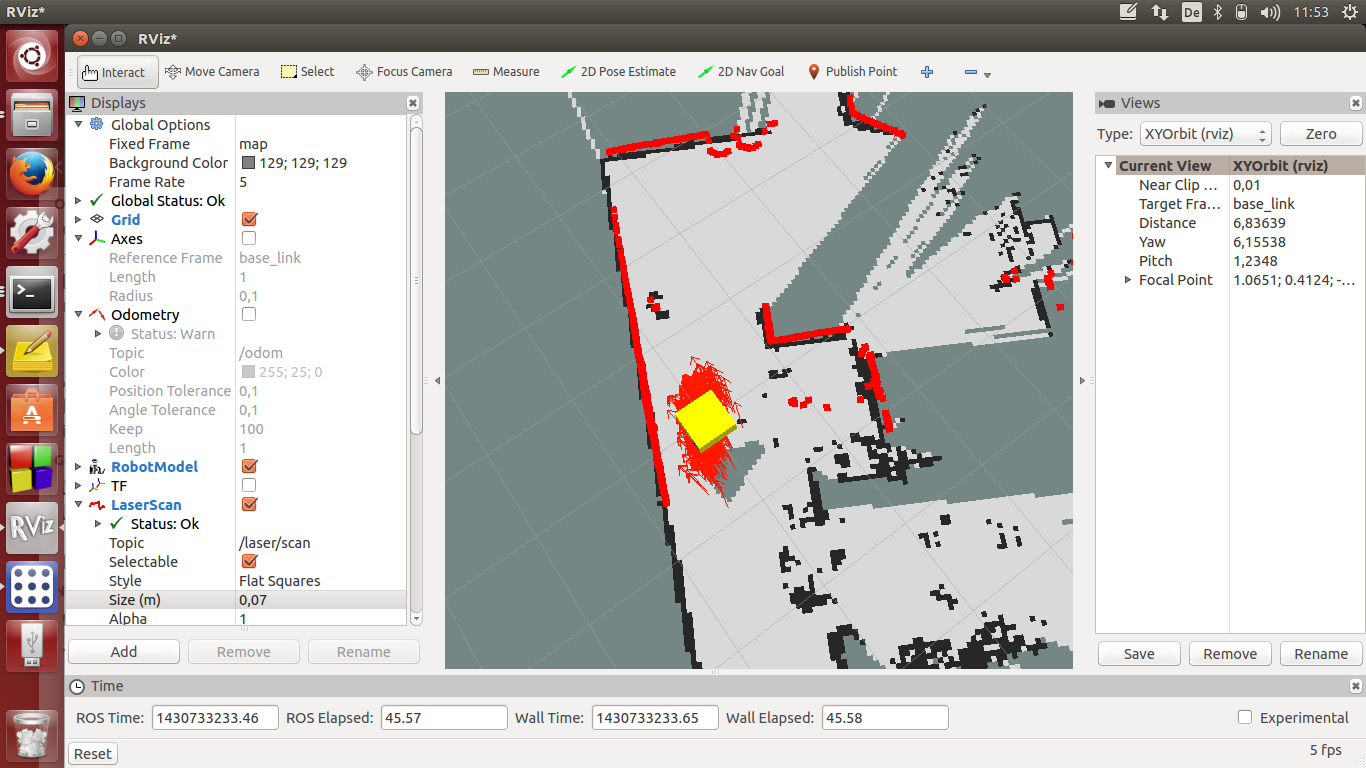
Here is a Screenshot when I drove forwards:
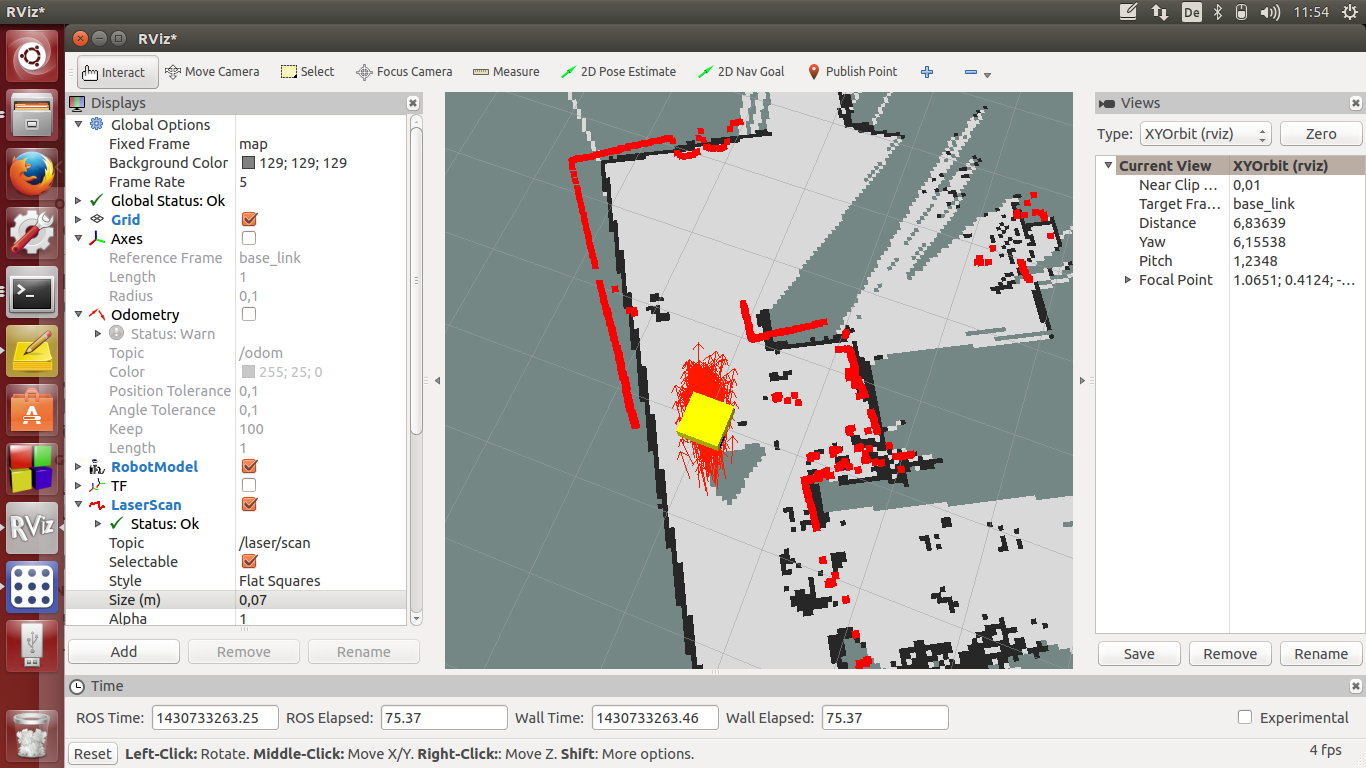
and once I am starting to turn the robot the laserscan (red boxes) dont match with the map anymore :/
I have really no idea where to look for the mistake:
Hope you can help, greeting |
| 2016-09-22 07:15:27 -0500 | received badge | ● Favorite Question (source) |
| 2016-09-20 17:47:09 -0500 | received badge | ● Good Question (source) |
| 2016-09-19 22:47:58 -0500 | received badge | ● Nice Question (source) |
| 2016-07-13 08:15:49 -0500 | received badge | ● Famous Question (source) |
| 2016-06-10 03:35:19 -0500 | received badge | ● Famous Question (source) |
| 2016-05-24 01:40:29 -0500 | received badge | ● Nice Question (source) |
| 2016-03-17 22:34:31 -0500 | received badge | ● Popular Question (source) |
| 2016-03-17 22:34:31 -0500 | received badge | ● Notable Question (source) |
| 2016-03-17 03:26:17 -0500 | received badge | ● Popular Question (source) |
| 2016-03-17 03:26:17 -0500 | received badge | ● Notable Question (source) |
| 2016-03-10 08:38:27 -0500 | received badge | ● Notable Question (source) |
| 2016-01-27 04:08:11 -0500 | received badge | ● Famous Question (source) |
| 2016-01-27 04:08:11 -0500 | received badge | ● Notable Question (source) |
| 2016-01-01 09:19:51 -0500 | marked best answer | Sending Data over UDP through Node Is there a possiblity to send Data through UDP over a ROS Node? To Specify my question: I have a Non-ROs Computer who provides odometry who sends through UDP the data and I want to write a ROS Node which listens to this data. Also I want to build a ROS Node who sends data through ethernet to the non-ros computer! thanks in advance |
| 2015-12-01 03:24:26 -0500 | received badge | ● Famous Question (source) |
| 2015-11-12 01:03:15 -0500 | received badge | ● Famous Question (source) |
| 2015-11-05 02:44:37 -0500 | received badge | ● Notable Question (source) |
| 2015-11-05 02:44:31 -0500 | received badge | ● Famous Question (source) |
| 2015-11-02 04:32:13 -0500 | received badge | ● Famous Question (source) |
| 2015-10-31 08:29:29 -0500 | received badge | ● Famous Question (source) |
| 2015-10-21 09:26:20 -0500 | received badge | ● Famous Question (source) |
| 2015-09-18 23:03:22 -0500 | received badge | ● Popular Question (source) |
| 2015-09-10 01:33:11 -0500 | asked a question | Copied Workspace, now Problem with rosdep Hi guys, I accidentally deleted my plattform but could save my workspace somehow. Now i set up a new Ros Indigo with Ubuntu 14.04 same stuff as before. I copied my data in my new workspace and sourced the setup.bash. Now I am trying to "make" again the nodes to be usable on the new system but when I am doing make it says: I have really no idea whats happening, he seems to have some kind of problem with rosdep? I hope anybody can help me I am really broke :( |
| 2015-09-02 12:27:35 -0500 | received badge | ● Notable Question (source) |
| 2015-09-02 12:27:33 -0500 | marked best answer | Clear Map from HectorMapping How can I clear a map created by Hector Mapping? or how can I restart hectormapping to create from now on a new map? |
| 2015-08-28 02:55:05 -0500 | marked best answer | urdf in rviz is too deep Hi, I setup my robot system and its working good. I am using hector mapping with urdf and a laserscanner and I am getting the following result:
Another Question is now, how can I make the Robot move autonomously and how can I integrate a path planner? What is a common used module to make the robot move and avoid obstacles and crashes? thanks in advance, felix |
| 2015-08-19 08:46:13 -0500 | marked best answer | ira_laser_tools not working Hi guys, I am trying to use the ira_laser_tools. I did the following: Then compile the package (make sure you have PCL [4] installed): and its compiling but when I am trying to run the launch file it says:
I really want to use this package but I have no freaking idea what the problem is. |
| 2015-08-19 08:20:06 -0500 | asked a question | Different Goals and Plans Hey there, I got a robot running with a differential drive and a s300 laserscanner. Its working pretty good, I can set goals and he is driving there so on. Now I am asking myself whats next and I saw this video: http://www.willowgarage.com/blog/2011... How can I do plans for my robot, set different places to be remember and stuff like this? What "cool" features can I use, can u give me some examples? thanks and have a great day :) |
| 2015-08-18 09:16:17 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
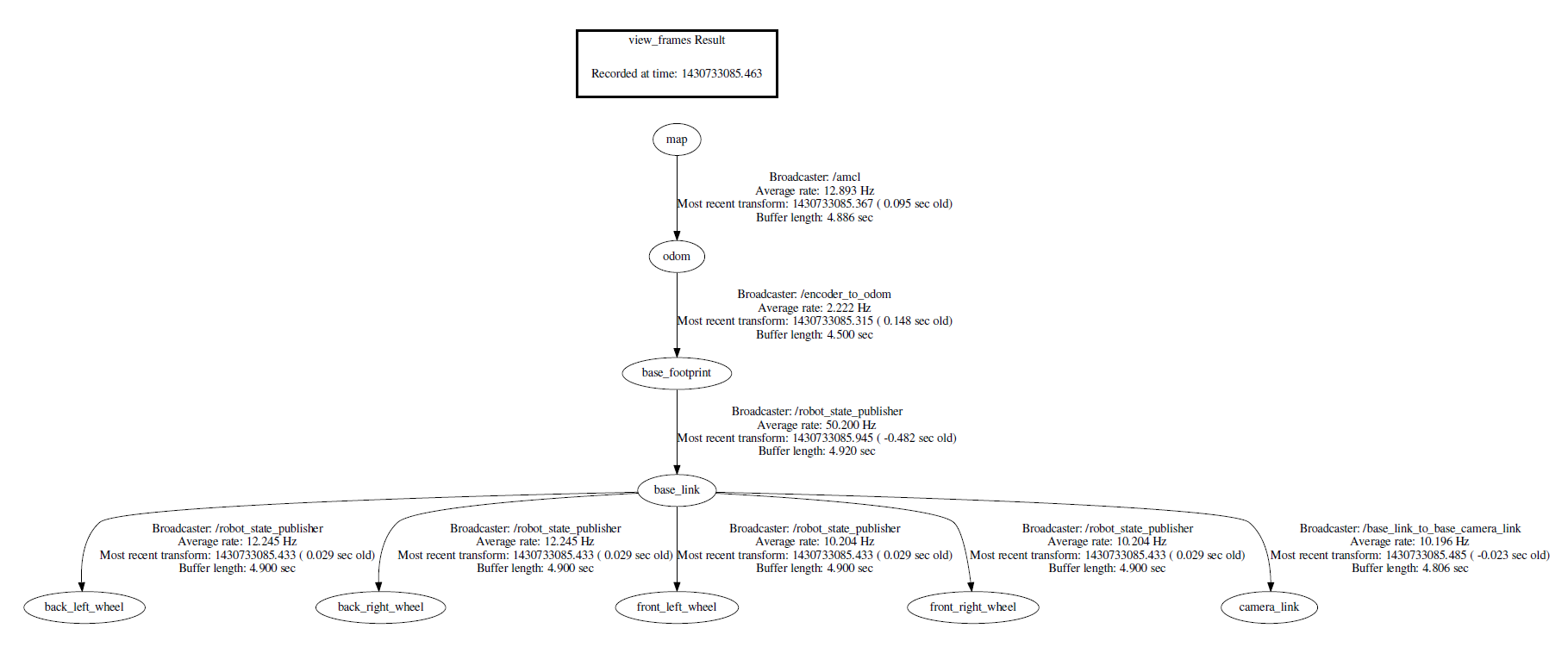
 I dont know why exactly the robot is kind of swimming in the world, here is my tf tree:
I dont know why exactly the robot is kind of swimming in the world, here is my tf tree: