The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2014-08-27 13:16:29 -0500 | received badge | ● Famous Question (source) |
| 2014-03-06 22:22:46 -0500 | asked a question | Missing shared libraries when running through rosrun I am running ROS Hydro on ubuntu 12.04. When i run: i get : But when i run it directly: everything works fine, it looks very strange to me. |
| 2014-02-19 21:27:31 -0500 | commented question | Hi folks, since days ROS wiki is unavailable. Same problem (Poland). |
| 2013-03-05 07:40:20 -0500 | received badge | ● Notable Question (source) |
| 2013-01-13 18:19:40 -0500 | received badge | ● Popular Question (source) |
| 2012-12-01 05:36:21 -0500 | asked a question | [groovy] pkg-config returns invalid libraries Hello, I recently tried to build my code in ros groove beta, and I get linking errors when linking with roscpp. The problem comes from invalid *.pc script. "pkg-config roscpp --libs" return "... -l/usr/lib/libboost_date_time-mt.so ..." and because gcc does not accept absolute paths for libraries this way it leads to linking error. Is it intended behaviour of pkg-config ? |
| 2012-11-25 20:21:03 -0500 | received badge | ● Notable Question (source) |
| 2012-11-24 13:47:17 -0500 | received badge | ● Popular Question (source) |
| 2012-11-23 05:04:24 -0500 | received badge | ● Organizer (source) |
| 2012-11-23 05:03:09 -0500 | asked a question | [groovy beta 1] gazebo segfault at startup. Hello, Gazebo segfault at startup when launched by empty_world.launch. backtrace: |
| 2012-11-22 23:48:21 -0500 | received badge | ● Nice Answer (source) |
| 2012-11-22 08:30:15 -0500 | answered a question | ros package for Kuka LWR IV FRI The best way to use KUKA LWR with ros is to use OROCOS which is integrated with ROS. You should look at code in our repos https://github.com/organizations/RCPRG-ros-pkg . An other important thing is that you need to use xenomai if you need command rate below 5ms. |
| 2012-09-03 08:26:37 -0500 | commented answer | Gazebo Illegal instruction The reason of crash (at least for me) is that gazebo is compiled using SSE4.1 instructions which are not supported on my cpu. |
| 2012-08-27 06:29:02 -0500 | received badge | ● Famous Question (source) |
| 2012-08-24 11:30:22 -0500 | received badge | ● Notable Question (source) |
| 2012-08-24 09:57:34 -0500 | commented answer | Problem with Gazebo after update. Question updated ... |
| 2012-08-24 09:54:57 -0500 | received badge | ● Popular Question (source) |
| 2012-08-24 09:49:24 -0500 | received badge | ● Editor (source) |
| 2012-08-24 09:41:26 -0500 | commented answer | Problem with Gazebo after update. I checked the svn trunk and it works much better but some problems still remains. |
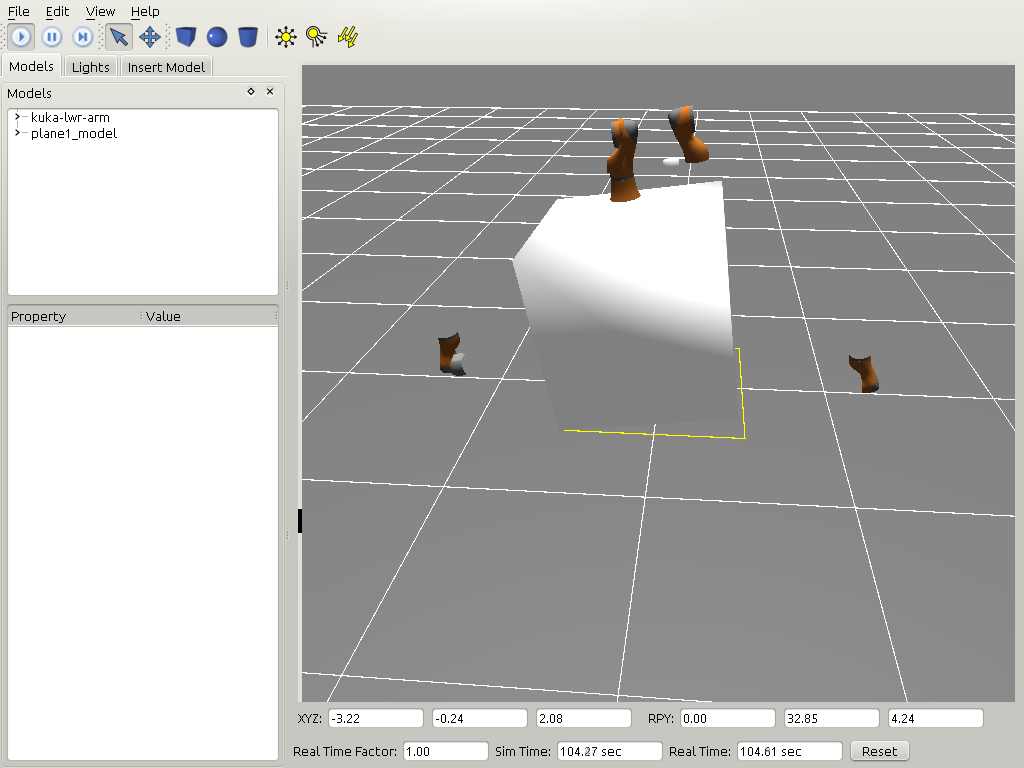
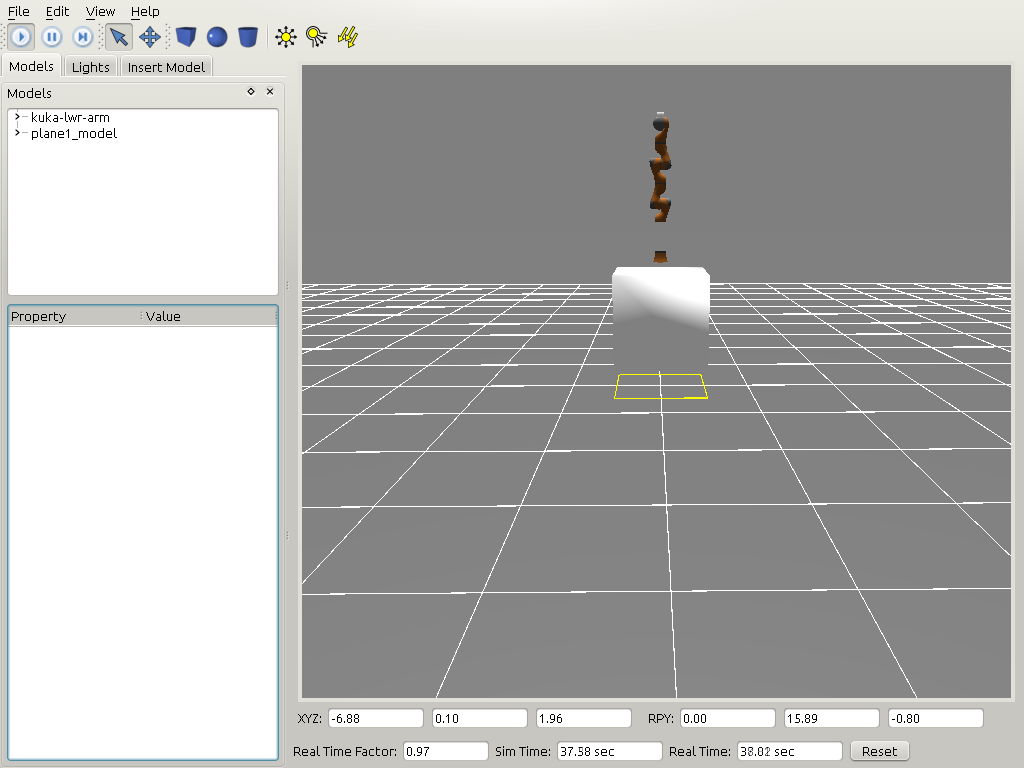
| 2012-08-24 03:54:26 -0500 | asked a question | Problem with Gazebo after update. Hello, I updated gazebo today (from apt (ubuntu 12.04)) and when i load one of my robots to gazebo all of the robot parts appear in random places. URDF for my robot is located in : https://github.com/RCPRG-ros-pkg/lwr_robot/tree/electric/lwr_defs
After updating to svn trunk it works much better.
But that not solve all of my problems, the second robot link appear translated from its base. It looks like a problem with chaining of fixed links. When i remove the world link and world to world_link joint the offset disappear.
|
| 2012-08-24 03:38:07 -0500 | received badge | ● Popular Question (source) |
| 2012-08-24 03:38:07 -0500 | received badge | ● Famous Question (source) |
| 2012-08-24 03:38:07 -0500 | received badge | ● Notable Question (source) |
| 2012-05-01 22:29:28 -0500 | received badge | ● Teacher (source) |
| 2012-05-01 22:29:28 -0500 | received badge | ● Self-Learner (source) |
| 2012-04-30 00:33:22 -0500 | answered a question | Using calibration stack for non PR2 robot I have found answer myself. The problem was caused by baseline_rgbd param in my system.yaml. When this parameter is set to any value, calibration node assume that depth informations is available. |
| 2012-04-26 06:41:53 -0500 | asked a question | Using calibration stack for non PR2 robot Hello, I would like to calibrate two arm system with sensor head. Based on PR2 and maxwell calibration stacks i made configs for my system and successfully run the capture_data. But i am unable to get estimation working. When i run calibration_estimation it crash because of NaN during calculations. Here is output from estimation node : estimation_output.txt |
| 2012-04-18 09:55:56 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.