The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-12-20 06:40:51 -0500 | received badge | ● Nice Answer (source) |
| 2020-05-03 19:08:50 -0500 | received badge | ● Self-Learner (source) |
| 2017-12-04 11:30:17 -0500 | received badge | ● Famous Question (source) |
| 2016-04-18 10:07:39 -0500 | received badge | ● Self-Learner (source) |
| 2016-04-18 10:07:39 -0500 | received badge | ● Teacher (source) |
| 2015-08-10 05:54:54 -0500 | received badge | ● Famous Question (source) |
| 2015-05-22 18:36:01 -0500 | received badge | ● Notable Question (source) |
| 2015-04-10 13:56:14 -0500 | received badge | ● Famous Question (source) |
| 2015-04-09 01:48:20 -0500 | received badge | ● Notable Question (source) |
| 2015-03-28 15:44:48 -0500 | commented question | Why does my ikfast solver work outisde of MoveIt! but not within? Just to update this. The solutions was to fix my model. |
| 2015-03-28 15:44:19 -0500 | commented question | What is the correct IK solver type for a 3DOF leg? Just to update this question, I eventually used 3D translation and it works a dream. |
| 2015-03-28 15:42:16 -0500 | received badge | ● Popular Question (source) |
| 2015-03-28 15:37:41 -0500 | commented question | pluginlib/class_loader does not load the correct class. Solved!!! It's not a bug, I had to rename the classes manually. Ahhhh nothing feelings better than figuring out a problem after days slaving away at it... |
| 2015-03-27 20:15:00 -0500 | asked a question | pluginlib/class_loader does not load the correct class. Hi all, For background, I'm trying to create two IKFast plugins for MoveIt! The problem I have is that MoveIt! only loads and uses one of the plugins. (I have confirmed this with print statements and have followed the trail all the way down to this line (github source code) of the "kinematics_plugin_loader.cpp" file of MoveIt! This is the line of code: It uses the To try and figure what is going on, I place some print statements around the code. I print out the library path and the argument name and everything looks OK (The names are different and the library paths are different). Yet when I call the method - named "testing" - of each library. They output the same message. What they should do is output different messages. So, it clearly executing the same library... But this is strange because I print out the library path and its different... I have no idea what going on... Can anyone help? Billy The code looks like this : The output looks like this: |
| 2015-03-24 08:51:50 -0500 | received badge | ● Popular Question (source) |
| 2015-03-20 08:14:24 -0500 | received badge | ● Enthusiast |
| 2015-03-19 02:38:28 -0500 | received badge | ● Editor (source) |
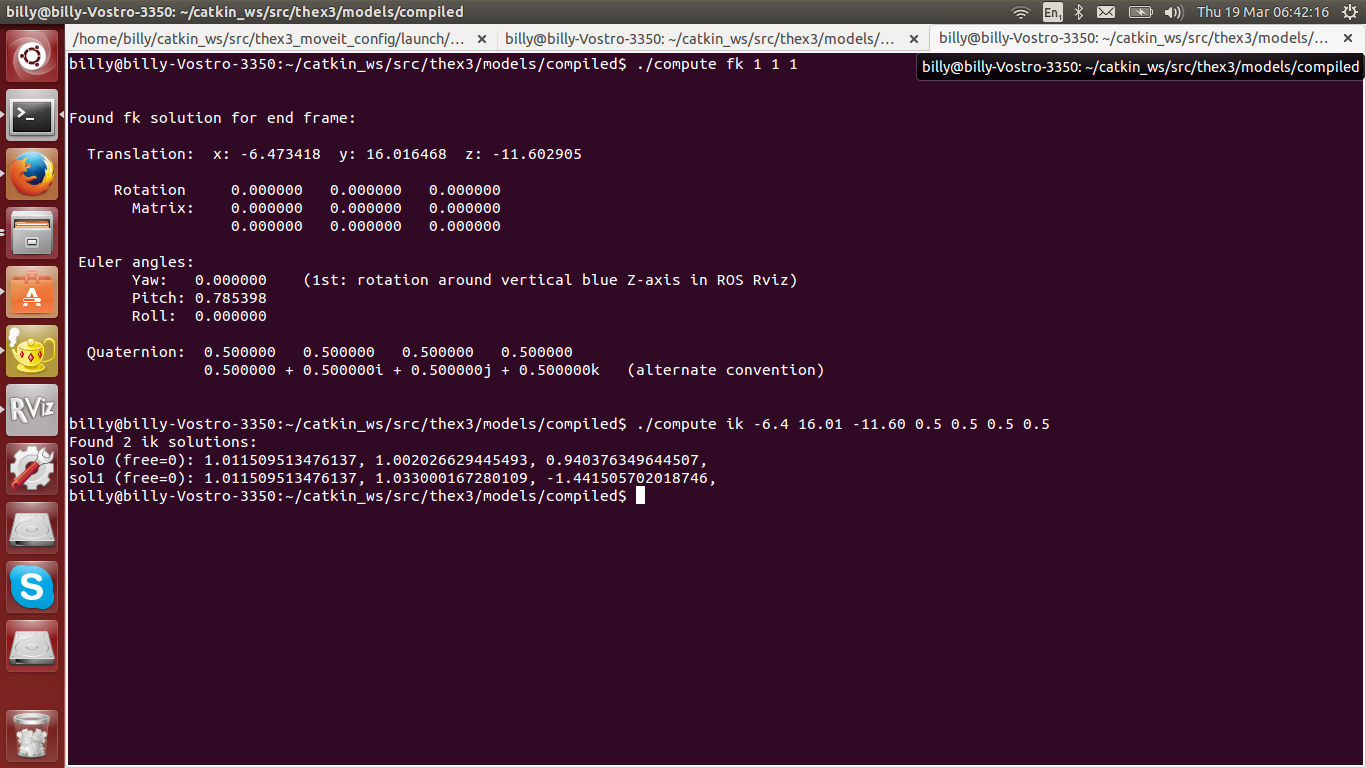
| 2015-03-19 02:35:00 -0500 | asked a question | Why does my ikfast solver work outisde of MoveIt! but not within? Hi, I'm steadily making progress with my project to control a 3DOF arm but there is this problem that been annoying me for the last couple of days. I'm trying to make a ikfast plugin for MoveIt! following the official tutorial. Everything seems to be working well, I test the solver using the compute program as instructed here (section 6) and everything seems to be working fine. I first test by using the fk solver, I then use the position returned by the fk solver to test the ik solver. As you can see, it seems to work well.
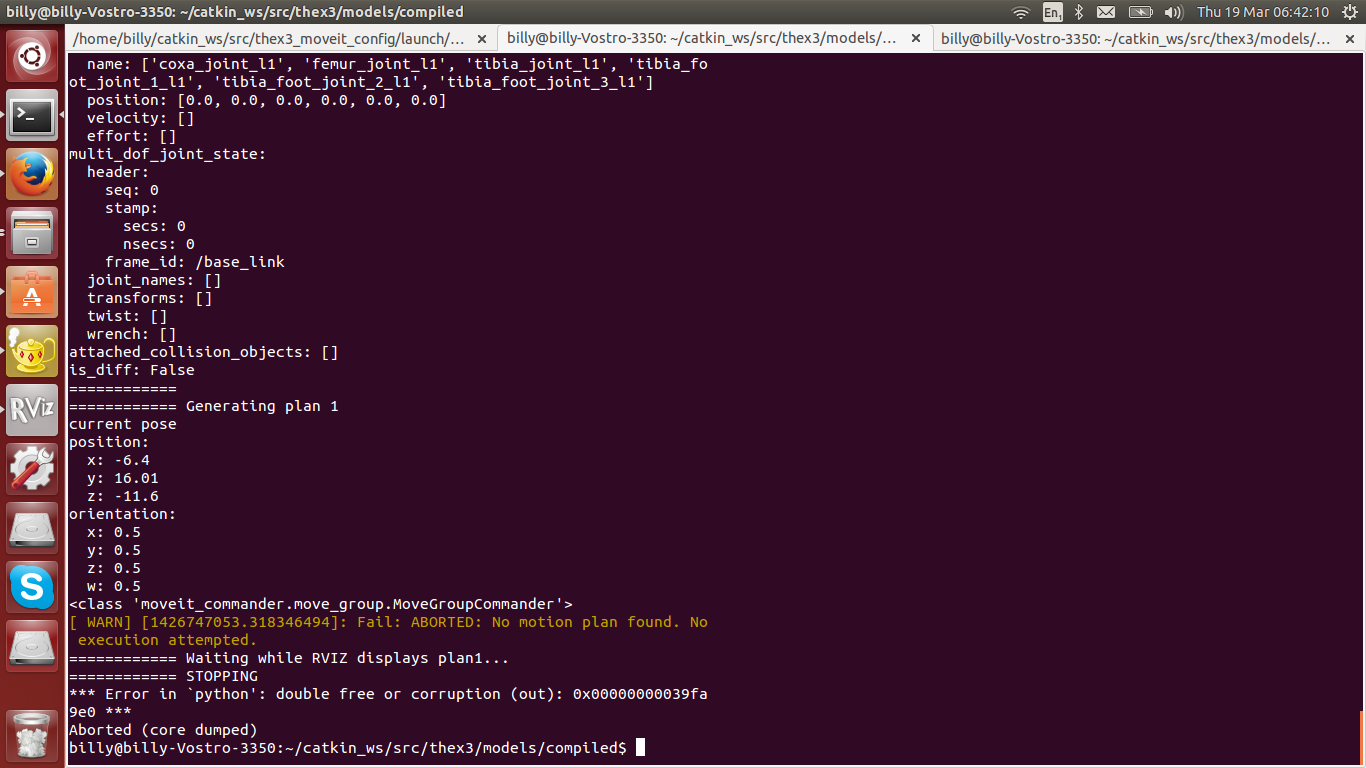
When I proceed to build the moveit plugin however and attempt to move the robot arm in a python script, the planning fails - as shown below. I've tried everything, I've tried setting the tolerances higher, I've tried using the same pose returned by get current pose. Nothing seems to work.
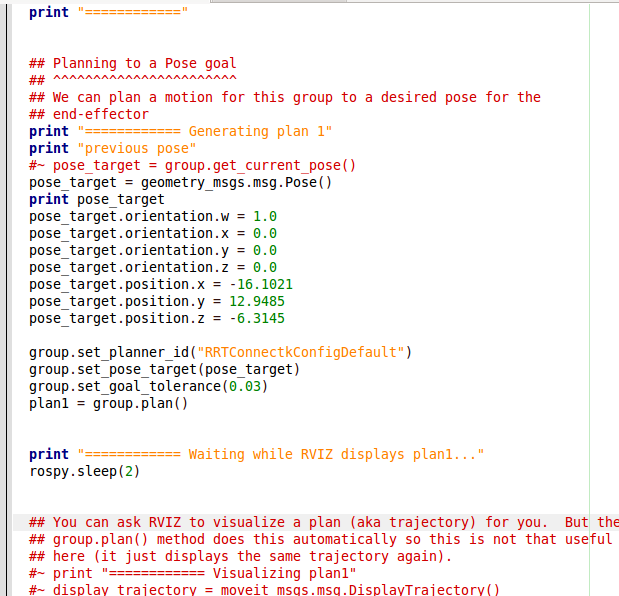
Here is the code I'm using:
Does anyone know what the problem might be? I'm kind of stuck at the moment. Billy ifast plugin tutorial: http://wiki.ros.org/Industrial/Tutori... python commander tutorial: http://docs.ros.org/indigo/api/pr2_mo... |
| 2015-03-18 13:04:21 -0500 | received badge | ● Notable Question (source) |
| 2015-03-16 03:13:58 -0500 | received badge | ● Popular Question (source) |
| 2015-03-15 18:20:32 -0500 | received badge | ● Student (source) |
| 2015-03-15 17:55:53 -0500 | asked a question | What is the correct IK solver type for a 3DOF leg? I've been trying to experiment with IKfast with a simple 3DOF arm I made. But I'm not sure which IK solver type to use. The types are stated here: http://openrave.org/docs/latest_stabl... I've been following this tutorial : http://moveit.ros.org/wiki/Kinematics... , and it seems like it only works when I use the rotational3d type, but the results are horrible and I'm pretty sure that the type is the problem. If I try to use other types such as the "transform3d", I get a "no variable to solve" error. I'd just like to have more details on what these types mean and if I'm using the correct type. The descriptions they have on that page isn't clear to me and I couldn't find anything on google. The arm looks like this: http://imgur.com/44k5Ki6 The arm revolves around the vertical cylinder, the two horizontal cylinders on the left can move up and down. This is probably a better picture. http://imgur.com/U3JOGVJ Many thanks. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.