The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-03-09 10:15:54 -0500 | received badge | ● Nice Question (source) |
| 2021-06-12 12:28:52 -0500 | received badge | ● Notable Question (source) |
| 2021-06-12 12:28:52 -0500 | received badge | ● Famous Question (source) |
| 2021-05-19 06:49:28 -0500 | received badge | ● Famous Question (source) |
| 2020-03-19 11:03:16 -0500 | received badge | ● Notable Question (source) |
| 2020-02-07 04:48:46 -0500 | received badge | ● Enlightened (source) |
| 2020-02-07 04:48:46 -0500 | received badge | ● Good Answer (source) |
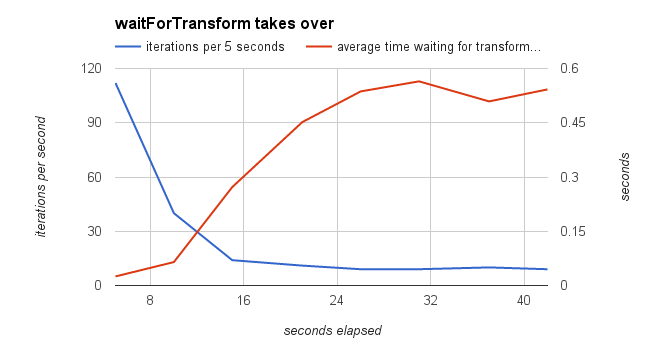
| 2019-11-15 16:18:12 -0500 | marked best answer | waitForTransform gets slower and slower I'm running ros hydro on ubuntu 12.04. I'm using openni_tracker v0.2.0. I'm trying to write a python script that draws an arrow between the user's head and right hand, using frames published by the skeleton tracker. The two transforms Here are two snippets of my code: I need line 5 because I'm drawing the arrow in the
Since the necessary transform information is getting published at 30 hz the whole time, I can't figure out what How can I fix my call to |
| 2019-11-15 16:18:12 -0500 | received badge | ● Nice Answer (source) |
| 2019-11-06 10:04:44 -0500 | received badge | ● Favorite Question (source) |
| 2019-11-06 10:04:04 -0500 | received badge | ● Nice Question (source) |
| 2019-08-06 11:20:56 -0500 | marked best answer | ImportError for any rosdep command Any I've tried How can I fix rosdep? |
| 2019-08-06 11:20:56 -0500 | received badge | ● Self-Learner (source) |
| 2019-05-20 02:28:11 -0500 | marked best answer | Query rosparam for public/private status Can the rosparam command line tool tell me whether a parameter is private or public? If so, how? |
| 2019-05-20 02:27:35 -0500 | received badge | ● Famous Question (source) |
| 2018-12-07 09:53:41 -0500 | received badge | ● Nice Question (source) |
| 2018-11-14 13:03:56 -0500 | received badge | ● Notable Question (source) |
| 2018-08-31 16:06:08 -0500 | received badge | ● Famous Question (source) |
| 2018-06-20 13:30:32 -0500 | marked best answer | Why does rospy instantiate msg arrays as lists but deserialize them as tuples? According to the ROS wiki page for msg,
I can't complain about the interchangability, but I'd expect that if msg arrays are deserialized as tuples, they would always be tuples unless the programmer explicity sets them to lists. However, I've observed that when instantiating a rospy msg using its empty constructor, any array fields are instantiated as empty lists. For example: This inconsistency means it's harder to write methods that deal with msg array fields because you have to expect the field to sometimes be an array and sometimes be a tuple. For example: A method that naively assumes list or tuple will work perfectly until the time you pass it the other. Then it's a long and painful bug hunt. Just wondering, am I missing something here? Why was it designed like this? Is it a bug or a feature? |
| 2018-05-08 18:45:44 -0500 | received badge | ● Nice Answer (source) |
| 2018-05-08 12:28:47 -0500 | received badge | ● Popular Question (source) |
| 2018-03-07 06:18:46 -0500 | received badge | ● Notable Question (source) |
| 2017-11-06 18:52:37 -0500 | marked best answer | Is there a way to always supprress desktop notifications in catkin tools? With catkin tools, I used the
I know that the option |
| 2017-10-30 05:45:00 -0500 | received badge | ● Popular Question (source) |
| 2017-09-21 18:00:09 -0500 | marked best answer | Guide to action client state ID numbers I'm writing an action server, and I got an unhelpful error message: The message is unhelpful becasue I don't know what state "2" is. I've found this documentation about action servers, but it doesn't say which state is "2". I would like to know the indices of the various states so that I can debug my action server. |
| 2017-09-21 18:00:05 -0500 | received badge | ● Popular Question (source) |
| 2017-09-20 21:45:08 -0500 | asked a question | Guide to action client state ID numbers Guide to action client state ID numbers I'm writing an action server, and I got an unhelpful error message: /my_action_ |
| 2017-09-12 20:23:12 -0500 | edited question | How can I configure the prefix that prints with a log message? How can I set the prefix that prints with a log message? Ros log messages print out with a prefix. The prefix may inclu |
| 2017-09-12 20:22:58 -0500 | asked a question | How can I configure the prefix that prints with a log message? How can I set the prefix that prints with a log message? Ros log messages print out with a prefix. The prefix may inclu |
| 2017-08-23 01:00:01 -0500 | received badge | ● Popular Question (source) |
| 2017-08-18 19:34:14 -0500 | asked a question | Query rosparam for public/private status Query rosparam for public/private status Can the rosparam command line tool tell me whether a parameter is private or pu |
| 2017-06-28 13:09:18 -0500 | asked a question | Is there a way to always supprress desktop notifications in catkin tools? Is there a way to always supprress desktop notifications in catkin tools? With catkin tools, I used the catkin build com |
| 2017-06-14 11:13:23 -0500 | received badge | ● Self-Learner (source) |
| 2017-04-20 14:38:39 -0500 | marked best answer | Rviz image status "ok" but no image I'm having trouble viewing a kinect image in RViz. Today, the same rviz config file that has worked in the past did not work. I thought there may be a problem with rviz, so I uninstalled and reinstalled it. That may be part of the problem. System:
Steps taken:
Result:
Other things tried:
Sanity checks:
I think it's an issue with the state of ROS or RViz on my desktop. I was using RViz constantly with the same system setup for weeks. Then I wasn't using it for a few weeks, and now it's broken. Any suggestions on how to make RViz display the camera images would be greatly appreciated! |
| 2017-03-13 01:03:28 -0500 | received badge | ● Notable Question (source) |
| 2017-03-13 01:03:28 -0500 | received badge | ● Famous Question (source) |
| 2016-09-21 17:01:39 -0500 | received badge | ● Famous Question (source) |
| 2016-09-21 17:01:39 -0500 | received badge | ● Notable Question (source) |
| 2016-07-05 15:41:30 -0500 | received badge | ● Famous Question (source) |
| 2016-06-09 13:56:18 -0500 | received badge | ● Notable Question (source) |
| 2016-06-09 13:56:18 -0500 | received badge | ● Famous Question (source) |
| 2016-06-06 07:36:39 -0500 | received badge | ● Famous Question (source) |
| 2016-06-03 17:11:48 -0500 | received badge | ● Famous Question (source) |
| 2016-06-03 14:24:28 -0500 | received badge | ● Famous Question (source) |
| 2016-04-27 13:01:15 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.