| 2017-05-02 11:42:40 -0500 | received badge | ● Famous Question
(source)
|
| 2016-07-29 08:21:45 -0500 | received badge | ● Famous Question
(source)
|
| 2016-01-01 09:17:21 -0500 | received badge | ● Famous Question
(source)
|
| 2015-12-02 13:59:27 -0500 | received badge | ● Famous Question
(source)
|
| 2015-11-19 05:36:53 -0500 | received badge | ● Famous Question
(source)
|
| 2015-09-26 03:11:13 -0500 | received badge | ● Famous Question
(source)
|
| 2015-06-24 15:19:32 -0500 | received badge | ● Notable Question
(source)
|
| 2015-06-18 03:14:08 -0500 | received badge | ● Notable Question
(source)
|
| 2015-06-11 03:31:19 -0500 | received badge | ● Notable Question
(source)
|
| 2015-06-11 03:31:19 -0500 | received badge | ● Popular Question
(source)
|
| 2015-05-28 23:04:37 -0500 | received badge | ● Notable Question
(source)
|
| 2015-05-27 04:47:07 -0500 | received badge | ● Popular Question
(source)
|
| 2015-05-25 08:30:24 -0500 | received badge | ● Notable Question
(source)
|
| 2015-05-12 13:04:51 -0500 | received badge | ● Notable Question
(source)
|
| 2015-05-12 13:02:44 -0500 | received badge | ● Popular Question
(source)
|
| 2015-05-12 11:30:33 -0500 | asked a question | controller and ros manager hello everyone :
I am using the ros controller , and I have wrote a controller and a controller manager , but when I want to load the controller to ros manager , I get some problem: [ERROR] [1431447499.444484032]: Could not load class drive_controller/DriveController: Failed to load library /home/exbot/Documents/ROS/control_error/devel/lib//libdrive_controller.so. Make sure that you are calling the PLUGINLIB_EXPORT_CLASS macro in the library code, and that names are consistent between this macro and your XML. Error string: Could not load library (Poco exception = /home/exbot/Documents/ROS/control_error/devel/lib//libdrive_controller.so: undefined symbol: _ZTVN16drive_controller15DriveControllerE)
[ERROR] [1431447499.444575741]: Could not load controller 'exp_drive_controller' because controller type 'drive_controller/DriveController' does not exist.
[ERROR] [1431447499.444601932]: Use 'rosservice call controller_manager/list_controller_types' to get the available types
[ERROR] [WallTime: 1431447500.445374] Failed to load exp_drive_controller
and this is drive_controller's CMakeLists.txt: cmake_minimum_required(VERSION 2.8.3)
project(drive_controller)
find_package(catkin REQUIRED COMPONENTS
controller_interface
hardware_interface
realtime_tools
roscpp
pluginlib
rospy
tf
urdf
)
find_package(Boost REQUIRED COMPONENTS system)
catkin_package(
INCLUDE_DIRS include
LIBRARIES drive_controller
CATKIN_DEPENDS controller_interface hardware_interface realtime_tools roscpp rospy tf urdf
DEPENDS system_lib
)
include_directories(include)
include_directories(
${catkin_INCLUDE_DIRS}
)
add_library(${PROJECT_NAME}
src/drive_controller.cpp
)
target_link_libraries(${PROJECT_NAME}
${catkin_LIBRARIES}
)
install(TARGETS ${PROJECT_NAME}
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
install(DIRECTORY include/${PROJECT_NAME}/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
FILES_MATCHING PATTERN "*.h"
PATTERN ".svn" EXCLUDE
)
install(FILES
driver_controller.xml
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
)
and this is the xml for the plugin:
<library path="lib/libdrive_controller">
<class name="drive_controller/DriveController" type="drive_controller::DriveController" base_class_type="controller_interface::ControllerBase">
<description>
</description>
</class>
</library>
and this my manager's .launch file: <launch>
<rosparam file="$(find exp_hardware)/config/exp_controller.yaml" command="load"/>
<node name="spawner" pkg="controller_manager" type="spawner" args="exp_drive_controller " respawn="false"/>
<node name="exp_hard_soft" pkg="exp_hardware" type="exp_hardware" output="screen"/>
</launch>
and this is my manager's yaml file: exp_drive_controller:
type: "drive_controller/DriveController"
left_wheel_name: 'left_wheel'
right_wheel_name: 'right_wheel'
the code for the drive controller is : #include <geometry_msgs/Twist.h>
#include <boost/shared_ptr.hpp>
#include <boost/make_shared.hpp>
#include <controller_interface/controller.h>
#include <hardware_interface/joint_command_interface.h>
#include <pluginlib/class_list_macros.h>
#include <tf/tfMessage.h>
#include <realtime_tools/realtime_buffer.h>
#include <realtime_tools/realtime_publisher.h>
#include <string>
using namespace std ;
using namespace controller_interface ;
typedef struct
{
double linear_x_vel ;
double angular_vel ;
ros::Time current_time ;
}Commands ;
namespace drive_controller {
class DriveController:
public Controller<hardware_interface::VelocityJointInterface>
{
public:
DriveController() ;
~DriveController();
bool init(hardware_interface::VelocityJointInterface *hw,
ros::NodeHandle &root_nh,
ros::NodeHandle &controller_nh);
void update(const ros::Time &time, const ros::Duration &period);
void starting(const ros::Time &time) ;
void stopping(const ros::Time &time) ;
protected:
private:
double wheel_radius_ ;
double wheel_separation_ ;
string left_wheel_name ;
string right_wheel_name ;
string name_ ;
double cmd_vel_timeout ;
hardware_interface::JointHandle left_wheel_joint ;
hardware_interface::JointHandle right_wheel_joint ;
realtime_tools::RealtimeBuffer<Commands> realtime_commands ;
Commands current_command ;
Commands last_command ;
ros::Subscriber cmd_vel_sub ;
// ros::Time last_state_time_ ;
enum {STARTING , STOPPING , RUNNING} STATE ;
private:
void cmdvelCallBack(const geometry_msgs::TwistConstPtr ptr) ;
bool getWheelNames(ros::NodeHandle& controller_nh,
const std::string& wheel_param,
std::string& wheel_name);
void brake() ;
};
}
#include <drive_controller/drive_controller.h>
#include <boost/make_shared.hpp>
#include <pluginlib/class_list_macros.h>
namespace drive_controller {
DriveController::DriveController()
{
wheel_radius_ = 0.9 ;
wheel_separation_ = 1.2;
current_command.angular_vel = 0 ;
current_command.linear_x_vel = 0 ;
current_command.current_time.init ...
(more) |
| 2015-05-11 10:00:39 -0500 | received badge | ● Famous Question
(source)
|
| 2015-04-01 04:23:02 -0500 | asked a question | some problem about the hector exploration control Hello everyone: I am trying to use hector navigation stack on my wheeled robot , and the package I used is : hector_costmap, hector_exploration_node, hector_elevation_mapping hector_exploration_controller. After running these package , I could see the path in the rviz , but My robot tends to just rotating along z-axis (perpendicular to the ground) almost all of the time. May I know what did I do wrongly? edit:the turning speed is 0.4m/s the moving speed is 0.15m/s.
The lidar I used is URG-04LX-UG01 Here is my hector_mapping.launch(start the hector_slam):
<launch> <node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen"> <param name="pub_map_odom_transform" value="true"/> <param name="map_frame" value="map" /> <param name="base_frame" value="base_link" /> <param name="odom_frame" value="base_link" /> <param name="base_frame" value="base_stabilized" /> <param name="odom_frame" value="base_stabilized" /> <!-- Map size / start point --> <param name="map_resolution" value="0.010"/> <param name="map_size" value="2048"/> <param name="map_start_x" value="0.5"/> <param name="map_start_y" value="0.5" /> <param name="laser_z_min_value" value="-2.5" /> <param name="laser_z_max_value" value="7.5" /> <!-- Map update parameters --> <param name="update_factor_free" value="0.4"/> <param name="update_factor_occupied" value="0.7" /> <param name="map_update_distance_thresh" value="0.002"/> <param name="map_update_angle_thresh" value="0.006" /> </node> <param name="laser_min_dist" value="0.02" /> <param name="laser_max_dist" value="5.6" /> <param name="map_pub_period" value="0.5" /> <node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100" /> <node pkg="hector_imu_attitude_to_tf" type="imu_attitude_to_tf_node" name="imu_attitude_to_tf_node" output="screen">
<remap from="imu_topic" to="thumper_imu" />
<param name="base_stabilized_frame" type="string" value="base_stabilized" />
<param name="base_frame" type="string" value="base_footprint" />
</node> </launch>
|
| 2015-03-30 02:16:21 -0500 | received badge | ● Popular Question
(source)
|
| 2015-03-28 06:04:01 -0500 | commented answer | some question about the frame of the hector slam |
| 2015-03-27 12:14:05 -0500 | asked a question | some question about the frame of the hector slam Hello everyone: I am studying the hector slam .
I have some questions when I watch the some example about the .launch file:
1.what is the base_stabilized frame ?
2.what is the scan_matcher frame ?
Is there some special affect for them? Thanks in advance:) |
| 2015-03-23 13:47:00 -0500 | received badge | ● Popular Question
(source)
|
| 2015-03-23 02:34:32 -0500 | received badge | ● Editor
(source)
|
| 2015-03-23 02:34:10 -0500 | asked a question | how to mark a special thing in a occupy map? Hello everyone: I am making a 'DIY' robot , now I want to mark some special mark (red dot......)in the occupy map (made by SLAM) when I found some special things from the usb_cam.
Could anybody give me some advise ,thanks a lot . |
| 2015-03-22 01:30:30 -0500 | asked a question | hector slam and the hector_costmap,planer hello everyone: I am studying the hector_slam , and I got some problem :
I have successful use the hector_mapping and the geotiff to get a map , and now I want to use the hector_costmap and hector_exploration_planner,controller (just like the robcup rescue) , but I have no ideas how to do it , can anybody give me some advise ? |
| 2015-03-09 09:46:58 -0500 | received badge | ● Popular Question
(source)
|
| 2015-03-09 01:31:50 -0500 | answered a question | how to double the resolution of the map ? I don't know what you want to do , but you can change the resolution in the .world file , and use it in stage_ros ,
hope it can help you . By the way, could you tell me more information about yourself ? I am in xi an ,too. |
| 2015-03-09 01:07:21 -0500 | commented question | about the rqt_pose_view Thanks for you answer , I found that I did not drag topic on the plugin of pose_view , after dragging , everything has been ok. |
| 2015-03-07 21:21:34 -0500 | answered a question | how to generate odometry with slam? generally speaking , you could not use the navigation stack without odometry
I hope this picture could help you:
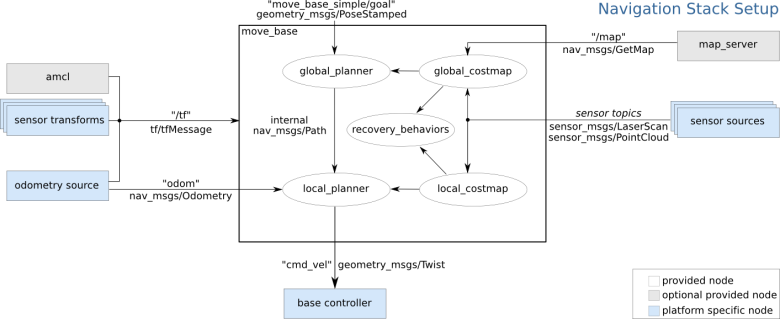 you could see there is odometry pass into the move_base |
| 2015-03-07 20:44:55 -0500 | asked a question | about the rqt_pose_view hello every one: I am learning to use rqt_pose_view, but I get some problem , I just follow this website wiki.ros.org/rqt_pose_view to test it ,but there is no change with the pose_view showing , then I used the command rostopic list, but I find nothing about the pose message . Could anyone tell me how to use the pose_view to show the pose of robot or which topic the is subscribed by the rqt_pose_view ? Thanks |
| 2015-03-01 05:57:09 -0500 | received badge | ● Enthusiast
|
| 2015-02-24 07:19:25 -0500 | received badge | ● Notable Question
(source)
|
| 2015-02-24 04:49:16 -0500 | commented answer | qt app and ros Thanks for your reply , I will just try your advise. |
| 2015-02-24 01:52:23 -0500 | received badge | ● Popular Question
(source)
|
| 2015-02-23 21:11:48 -0500 | commented question | qt app and ros Thank you , I have awared this just now , but I also would like to know : are there some plugins in rqt that could get the laser scanning map and display it in real-time ? (not rviz) So can you give me some advise? |

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.