The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-10-16 06:06:25 -0500 | received badge | ● Famous Question (source) |
| 2019-05-20 02:26:15 -0500 | marked best answer | How to use ddd with roslaunch? I'm trying to debug some segfaults and I was wondering if anyone managed to get ddd / gdb ( https://www.gnu.org/software/ddd/ ) working with nodes that were launched with roslaunch (and if so, how to do so). Thanks! |
| 2019-05-20 02:25:27 -0500 | received badge | ● Famous Question (source) |
| 2019-05-20 02:25:27 -0500 | received badge | ● Popular Question (source) |
| 2019-05-20 02:25:27 -0500 | received badge | ● Notable Question (source) |
| 2019-05-20 01:58:10 -0500 | marked best answer | RVIZ Marker STL Mesh Color and Transparency Issues Hi, Has anyone been able to get STL meshes to properly display with the specified color and alpha values when generating the messages in roscpp and visualizing them in RVIZ? For some reason, I can get the meshes to display but no matter how I change the color and alpha values, it stays the same solid gray color and opacity (I set mesh_use_embedded materials to false). Thanks! |
| 2018-05-09 14:11:51 -0500 | received badge | ● Famous Question (source) |
| 2018-05-09 14:11:51 -0500 | received badge | ● Notable Question (source) |
| 2018-03-29 03:34:10 -0500 | received badge | ● Taxonomist |
| 2017-12-31 15:10:45 -0500 | commented answer | hi guys, i m trying to create a map in a pcd file using kitti datasets, can anyone help me ? i have transformed kitti dataset to a rosbag file You can use something like this function (http://docs.pointclouds.org/trunk/classpcl_1_1_point_cloud.html#af2065290a879e |
| 2017-12-30 18:54:02 -0500 | commented answer | hi guys, i m trying to create a map in a pcd file using kitti datasets, can anyone help me ? i have transformed kitti dataset to a rosbag file You should be able to use this function (http://docs.pointclouds.org/trunk/group__io.html#ga09bdff6c474655ebbefa8a97de66 |
| 2017-12-21 15:24:34 -0500 | received badge | ● Famous Question (source) |
| 2017-11-30 14:05:59 -0500 | received badge | ● Famous Question (source) |
| 2017-11-02 18:19:21 -0500 | received badge | ● Famous Question (source) |
| 2017-10-13 10:31:19 -0500 | marked best answer | MoveIt! Installation Hi, I've been trying to install MoveIt! on ROS Indigo in Ubuntu 14.04 and have been running into issues. I first tried to install it using the binary installation instructions: sudo apt-get install ros-indigo-moveit-ros However, it says: I have also tried installing it from source. It seemed to work after a few times but when I try to run a tutorial program, it says "ImportError: No module named moveit_commander" I tried reinstalling ROS multiple times to no avail. I've been looking around online but it seems like other people are having similar issues. Has any been able to successfully install MoveIt? Thanks |
| 2017-10-13 07:04:23 -0500 | received badge | ● Notable Question (source) |
| 2017-10-13 03:58:48 -0500 | received badge | ● Popular Question (source) |
| 2017-10-10 15:18:04 -0500 | commented answer | interactivemarker processfeedback callback as a class method How did you write your callback function? I followed that tutorial but for some reason it is just segfaults when the fun |
| 2017-09-26 09:14:00 -0500 | asked a question | RVIZ Marker STL Mesh Color and Transparency Issues RVIZ Marker STL Mesh Color and Transparency Issues Hi, Has anyone been able to get STL meshes to properly display with |
| 2017-08-31 04:14:41 -0500 | received badge | ● Popular Question (source) |
| 2017-08-30 03:34:12 -0500 | answered a question | hi guys, i m trying to create a map in a pcd file using kitti datasets, can anyone help me ? i have transformed kitti dataset to a rosbag file @ilyess, I would go with LOAM (it got 2nd on the KITTI odometry / SLAM evaluation). If you use the velo_64 branch (http |
| 2017-08-30 03:27:06 -0500 | commented question | hi guys, i m trying to create a map in a pcd file using kitti datasets, can anyone help me ? i have transformed kitti dataset to a rosbag file I don't think that would necessarily create a map of the entire rosbag's raw data? See my answer below. |
| 2017-08-29 09:31:05 -0500 | marked best answer | Best way to add a topic to an existing rosbag? What would be the best way to add a topic to an existing rosbag? Play the bag and publish the topic while doing a rosbag record -a? Thanks! |
| 2017-08-28 08:47:12 -0500 | commented question | LOAM Package needed What are you planning to do with it? There are separate branches for different Velodyne models. |
| 2017-08-28 08:46:48 -0500 | commented answer | LOAM Package needed He removed it because he started a company with it (http://www.kaarta.com/). |
| 2017-08-28 08:45:28 -0500 | edited question | Best way to add a topic to an existing rosbag? Best way to add a topic to an existing rosbag? What would be the best way to add a topic to an existing rosbag? Play th |
| 2017-08-28 08:45:21 -0500 | edited question | Best way to add a topic to an existing rosbag? Best way to add a topic to a rosbag? What would be the best way to add a topic to a rosbag? Play the bag and publish th |
| 2017-08-28 08:45:00 -0500 | asked a question | Best way to add a topic to an existing rosbag? Best way to add a topic to a rosbag? What would be the best way to add a topic to a rosbag? Play the bag and publish th |
| 2017-08-27 12:25:25 -0500 | received badge | ● Notable Question (source) |
| 2017-08-24 08:30:39 -0500 | commented answer | Unable to detect AprilTag using ROS Is the camera working? I would try and contact the developer on the link you posted to see if you are missing anything. |
| 2017-08-24 05:13:27 -0500 | commented answer | Unable to detect AprilTag using ROS You should be able to do "rostopic echo /tf" and see those frames if that AprilTag is entered in the launch file. I woul |
| 2017-08-24 05:13:11 -0500 | commented answer | Unable to detect AprilTag using ROS You should be able to do "rostopic echo /tf" and see those frames if that AprilTag is entered. I would recommend trying |
| 2017-08-24 04:22:05 -0500 | commented answer | Unable to detect AprilTag using ROS No, it is just a label. You can set them to anything - they just need to be unique. The detected AprilTags will appear w |
| 2017-08-23 14:20:37 -0500 | commented answer | Merging rosbag files and removing gaps of no messages The only time based operations have to deal with tf lookups, do you think that might cause problems? |
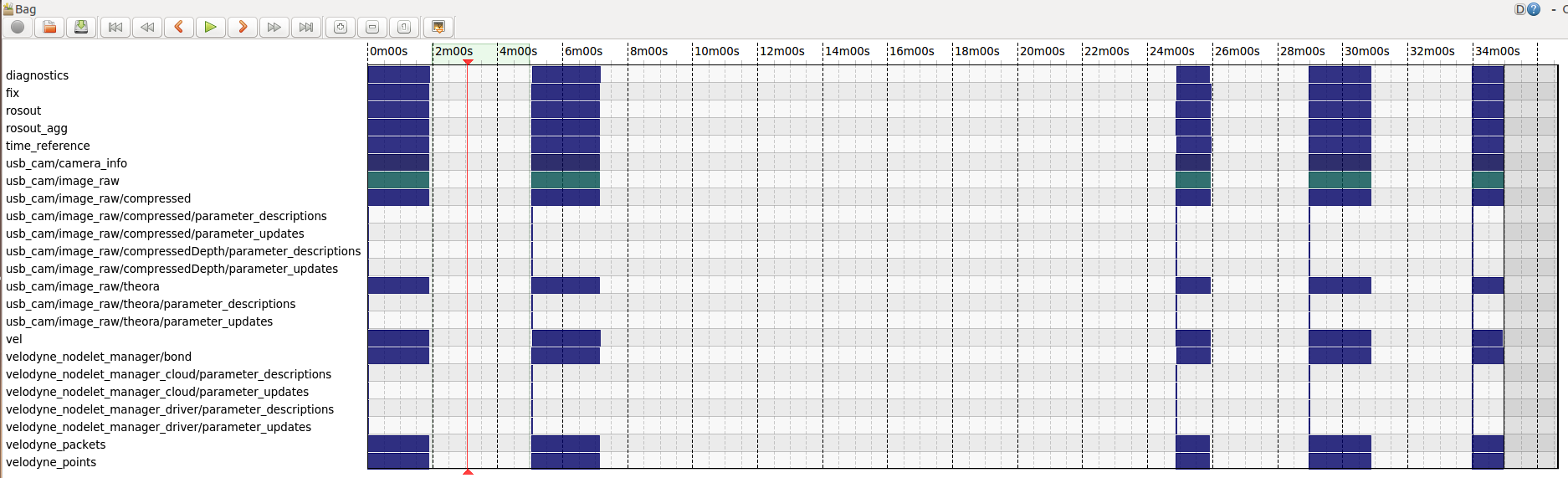
| 2017-08-23 14:06:39 -0500 | marked best answer | Merging rosbag files and removing gaps of no messages I have several bags recorded of navigating through an environment, with pauses between each bag from configuring the system. I would like to playback the entire sequence as one smooth continuous sequence. I merged the bags using https://gist.github.com/NikolausDemme... but there are large time gaps with no ROS messages in the merged bag as seen in the rqt_bag screenshot below.
Is there any easy way to remove these timegaps? Thanks! |
| 2017-08-23 10:53:25 -0500 | commented answer | Unable to detect AprilTag using ROS They just need to be unique. If I remember correctly (it was awhile since I worked with AprilTags), they will correspond |
| 2017-08-23 10:48:19 -0500 | received badge | ● Popular Question (source) |
| 2017-08-23 10:38:43 -0500 | answered a question | Unable to detect AprilTag using ROS You need to put frame_ids for your tags, like the tag with id 1. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.