The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-05-09 22:04:39 -0500 | commented answer | unable to solve "nvcc fatal: A single input file is required for a non-link phase when an outputfile is specified" error Works on my side! |
| 2019-04-07 03:52:22 -0500 | marked best answer | RViz keep saying "No transform from [front_left] to [base_link]" I have a package named sp1s, I added a URDF, as simple as below: Here is the launch file I edited: When I launch it by "roslaunch sp1s display.launch model:=urdf/sp1s.urdf", the Rviz keep saying "No transform from [front_left] to [base_link]". I double checked my urdf content, I believe it caused by using joint type "continuous". I strongly believe its a bug. When I follow the urdf_tutorial by 'roslaunch urdf_tutorial display.launch model:=urdf/06-flexible.urdf gui:=True', it was showing fine. But I changed the 06-flexible.urdf simply by add one space at the last empty line, launch it again it would say same thing on RViz Why its happening, how to work around it? |
| 2019-04-03 10:23:19 -0500 | received badge | ● Necromancer (source) |
| 2019-04-03 10:23:19 -0500 | received badge | ● Teacher (source) |
| 2018-01-11 20:30:02 -0500 | answered a question | No JPEG data found in image reset parameter 'video_device' , try between '/dev/video1' '/dev/video0' , there should be one works for you. |
| 2016-09-25 14:27:45 -0500 | received badge | ● Famous Question (source) |
| 2016-09-25 14:27:45 -0500 | received badge | ● Notable Question (source) |
| 2016-09-25 14:27:45 -0500 | received badge | ● Popular Question (source) |
| 2016-06-20 14:17:09 -0500 | received badge | ● Famous Question (source) |
| 2016-05-09 07:25:55 -0500 | received badge | ● Notable Question (source) |
| 2016-05-09 07:25:55 -0500 | received badge | ● Famous Question (source) |
| 2016-03-25 09:38:26 -0500 | answered a question | At an impasse using OpenCV It caused by conflict between opencv2 and opencv2. You should find the following script in your package CMakeFile.txt: find_package(OpenCV REQUIRED) Replace it with find_package(OpenCV 2 REQUIRED) I worked whole day to find the solution |
| 2016-02-19 16:15:57 -0500 | received badge | ● Famous Question (source) |
| 2015-12-18 14:58:12 -0500 | received badge | ● Famous Question (source) |
| 2015-09-02 14:46:17 -0500 | received badge | ● Famous Question (source) |
| 2015-08-12 02:53:16 -0500 | received badge | ● Notable Question (source) |
| 2015-08-11 15:46:49 -0500 | received badge | ● Popular Question (source) |
| 2015-08-07 09:35:00 -0500 | asked a question | Why doesn't costmap clear the old obstacles outside the scanner scope? I can't upload the snapshot. So hopfully I can make the issue clear. When I was using turtlebot to navigate along the known map, the costmap would inflate the static map which is fairly well. The XTion scanner found the obstacles marked as yellow which was removed after a while. The scanner was not aware of this new situation because was outside the scanner scope at the moment. I setup a new destination on the map but ROS reported Failed to find the route on the map. It was caused by those obstacles who were in the way minutes ago. I wonder why costmap doesn’t remove the out of date obstacles in a given period? In this situation how to make the ROS navigation stack figure out a route? |
| 2015-06-24 08:22:06 -0500 | received badge | ● Popular Question (source) |
| 2015-06-23 02:30:31 -0500 | received badge | ● Famous Question (source) |
| 2015-05-28 03:00:53 -0500 | received badge | ● Notable Question (source) |
| 2015-05-12 02:42:12 -0500 | received badge | ● Famous Question (source) |
| 2015-04-23 01:55:38 -0500 | received badge | ● Notable Question (source) |
| 2015-04-17 10:04:17 -0500 | commented question | Need to publish X, Y position to ROS while slamming with gmapping I want to create map with Xtion pro live. I provided odom and tf information to ros. But the map was messed up, I don't know why. Sounds gmapping failed to match odom and map information |
| 2015-04-17 09:57:55 -0500 | commented question | Need to publish X, Y position to ROS while slamming with gmapping hi, thanks for your reply, My detailed issue description is here |
| 2015-04-17 09:50:48 -0500 | received badge | ● Popular Question (source) |
| 2015-04-17 07:32:07 -0500 | received badge | ● Notable Question (source) |
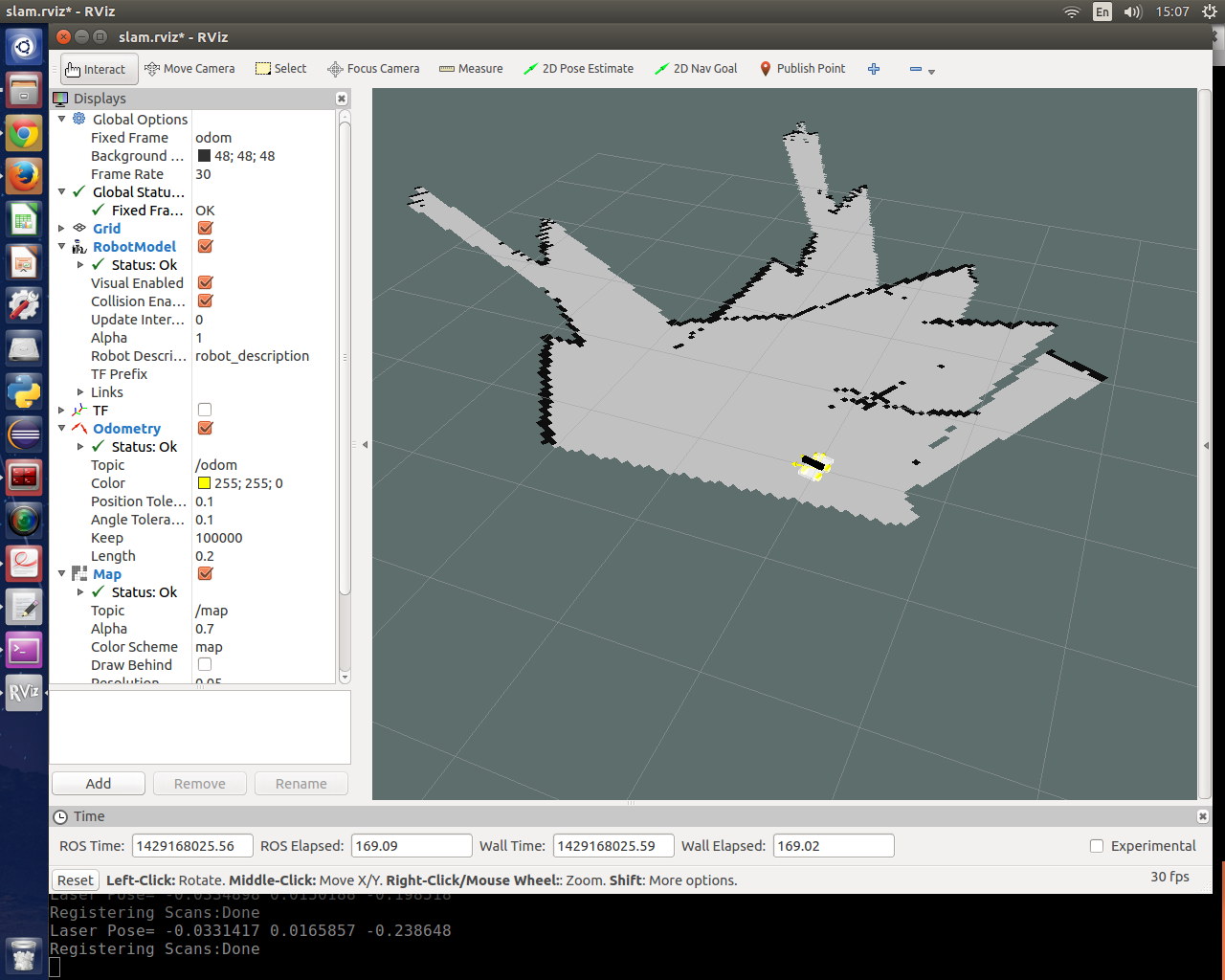
| 2015-04-16 03:00:30 -0500 | asked a question | slam mapping not spliced well, help! I'm using Xtion pro live on the RaspBerry pi. Gyroscope and compass also working very well.ROS mastered on a PC. base_control can publish orientation and position pretty good and visualized on the Rviz. depthimage_to_laserscan,gmapping nodes are publishing message on the wire. The first frame map was good. I manually rotate the robot which had the Xtion pro live attached on it. The map coming later looked not spliced very well :( The robot on the Rviz was little bit jumping, sounds like changing the pose by the ROS. I think its the base_control's job to publish the pose via odom topic, am I right? Is there any node matching the position in background? The map is repeating the same pattern. Is it possibly caused by system time synchronization issue?
|
| 2015-04-15 22:00:30 -0500 | received badge | ● Popular Question (source) |
| 2015-04-15 09:51:31 -0500 | asked a question | Need to publish X, Y position to ROS while slamming with gmapping Shall I say, when laser sanner is working very well and gmapping is translating message to /map topic very well, there is no need to publish X, Y position and heading angle to ROS via /odom topic? |
| 2015-04-15 09:40:01 -0500 | received badge | ● Notable Question (source) |
| 2015-04-08 10:28:53 -0500 | asked a question | nodelet call service failed, how to know where is the service source code so to debug I'm running ros in raspberry pi instead of PC, the node launched by : arg name = camera_nodelet_manager I debugged nodelet and found service '/camera/camera_nodelet_manager/load_nodelet' call failed.
|
| 2015-04-07 03:08:33 -0500 | received badge | ● Editor (source) |
| 2015-04-07 03:02:50 -0500 | asked a question | roslaunch openni2_launch failed on raspberry pi I installed openni2_launch from kalectro OpenNI2 It run well and simpletest worked fine. I compiled openni2_launch and openni2_camera in raspberry pi. When run the command following, it failed at [camera/driver-2] process. Who can help to figure out how to fix it? |
| 2015-02-08 23:04:19 -0500 | received badge | ● Popular Question (source) |
| 2015-02-08 08:37:45 -0500 | received badge | ● Student (source) |
| 2015-02-08 03:32:12 -0500 | edited question | How to use python3 in ROS I'm trying to use some python3 module in my node program, but ROSRUN can't use python3. So I tried to install python3 catkin command like this: I create a new package now in the available work space, catkin_make the ws, but got the error like this: Why? I'm sure the CMakeList.txt is right. The old package created before was well. New package always fail, sounds like the new apt-get installation screwed my ROS |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.