
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-05-26 02:55:33 -0500 | marked best answer | frontier exploration theory and usage Hi, I'm trying to understand how I can use the package frontier_exploration in order to use it for my project. I have studied the paper describing this theory by Yamauchi (1997). I would like to know whether this implementation of frontier exploration is based on the most basic theory (i.e. the greedy approach where the robot chooses its closest frontier) or whether some objective function is being used to decide upon the choice of the frontier to explore. Thanks. --EDIT: When I tried to run the global_map.launch file and provided a polygon boundary + a start point, I got the following result: Nothing worked and the exploration was not performed. The nodes that I am running include: rosAria (robot control), sicktoolbox_wrapper (laser driver), tf node, gmapping to build the map. Do i need to run some other node to perform actionlib? |
| 2022-05-26 02:54:43 -0500 | received badge | ● Good Question (source) |
| 2020-12-31 08:58:44 -0500 | received badge | ● Nice Question (source) |
| 2019-12-03 09:38:49 -0500 | received badge | ● Great Question (source) |
| 2019-08-21 07:26:43 -0500 | received badge | ● Favorite Question (source) |
| 2019-06-24 18:03:16 -0500 | received badge | ● Good Question (source) |
| 2018-10-18 07:24:20 -0500 | received badge | ● Nice Question (source) |
| 2018-08-08 12:51:19 -0500 | marked best answer | Robot coordinates in map Hi, I am developing an exploration algorithm based on frontier exploration. In my code, I am subscribing to the topic Now I need to get the robot location in (x,y) coordinates within that map. This means that I must have some (x,y) coordinates within the 4000 x 4000 map, i.e. within the vector For me, this is not making much sense because I would need some (x,y) value that corresponds to some (x,y) coordinate in the map. This image might help you understand what I mean and the kind of result I'm after. Thank you in advance. |
| 2018-02-21 04:33:39 -0500 | marked best answer | gmapping localization information Hello ROS community, Since Is the gmapping package in ROS performing SLAM? If so, can we get localization information directly from it, rather than having to use other packages like I need to have a fairly accurate robot pose estimate within the map that is the result of SLAM Also, I seem to have a localization problem in gmapping since if the robot is rotated by 180 degrees in an alley, the resulting map is a mess as shown below: I appreciate any help. Thank you! RND |
| 2017-12-20 20:29:39 -0500 | marked best answer | ROS compatibility with PowerBot Hi, I'm a beginner to ROS and robot control in general. Are the libraries provided by ROS compatible with the PowerBot from mobilerobots.com ( PowerBot)? Thanks. R. |
| 2017-12-20 20:27:58 -0500 | received badge | ● Famous Question (source) |
| 2017-12-20 00:07:30 -0500 | received badge | ● Popular Question (source) |
| 2016-08-19 07:29:07 -0500 | received badge | ● Nice Question (source) |
| 2016-06-02 20:44:33 -0500 | received badge | ● Famous Question (source) |
| 2016-05-11 03:13:29 -0500 | received badge | ● Famous Question (source) |
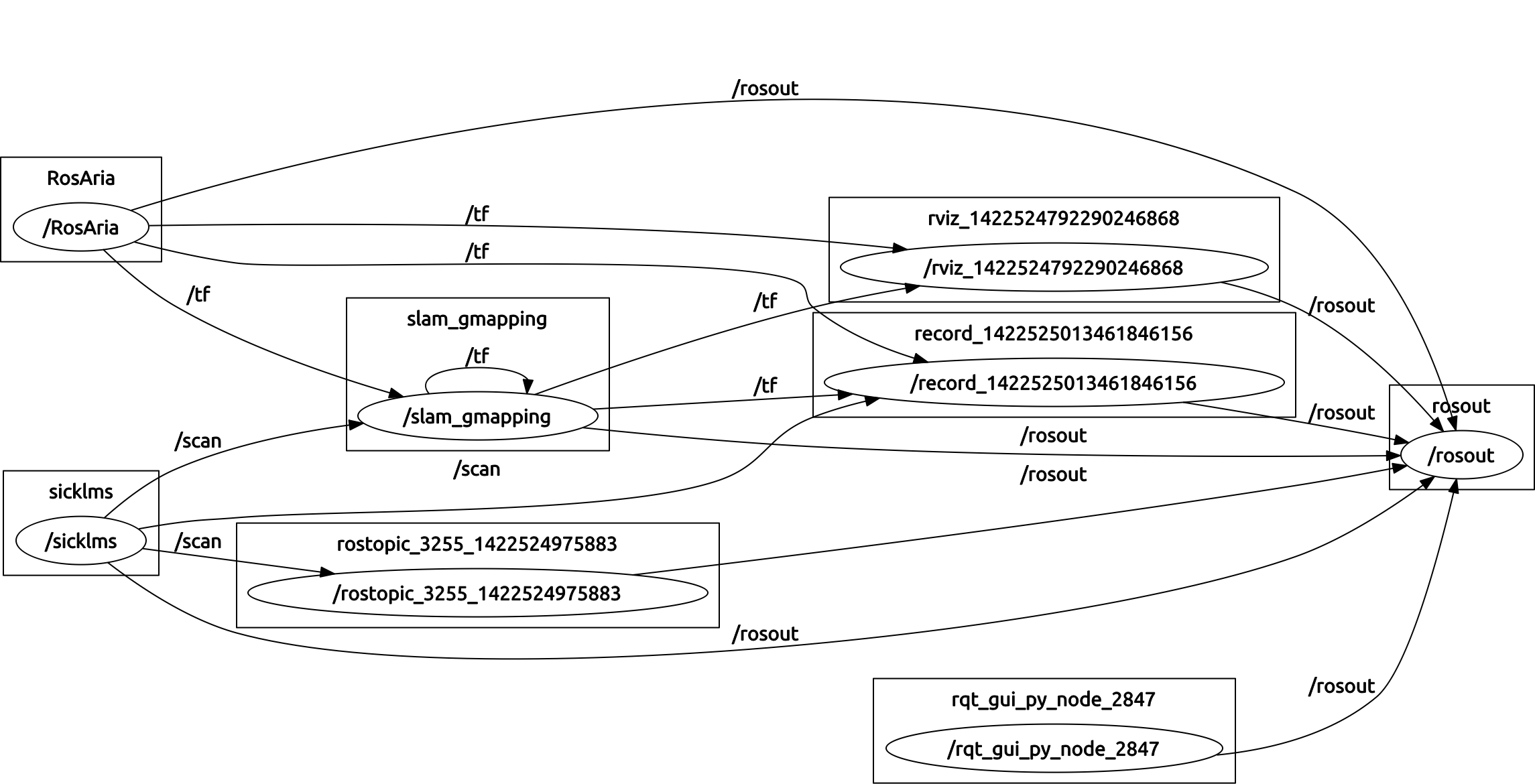
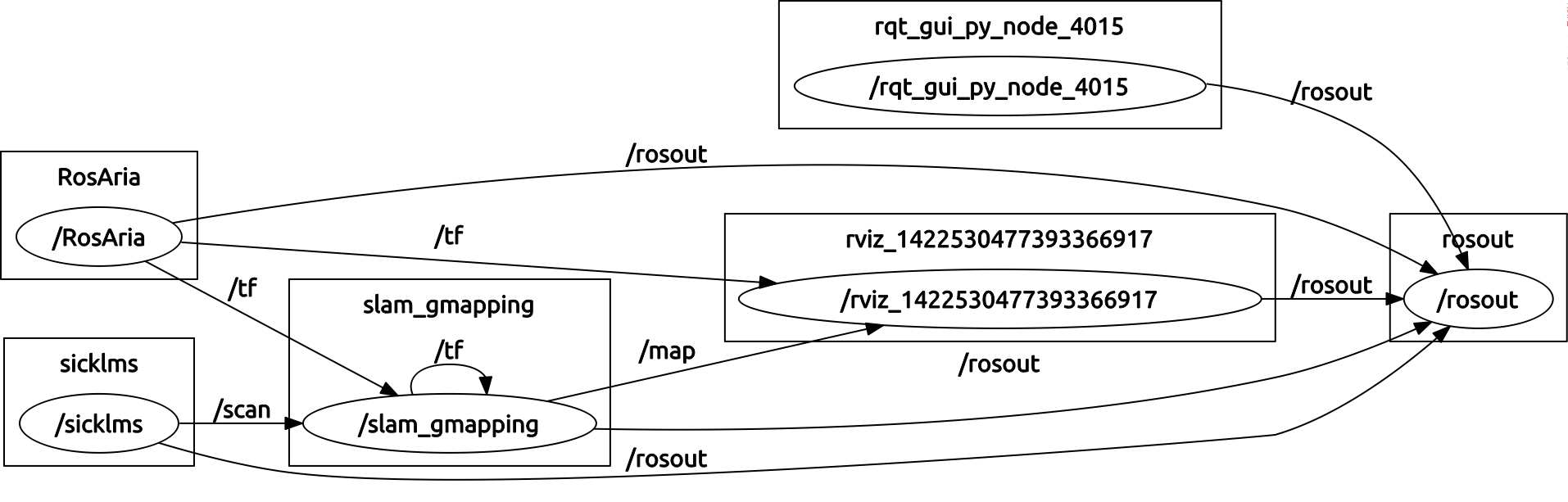
| 2016-05-08 16:07:07 -0500 | marked best answer | Map not built in slam_gmapping Hi, I am trying to build a map using slam_gmapping. My platform is ActivMedia MobileRobots Powerbot equipped with sonar sensors and SICKLMS laser range finder. I am using the So I followed this tutorial and built a bag by moving my robot around the room. The bag was created "successfully" since no errors had been given. At this point I wanted to verify that all the nodes were running appropriately and the right publishing and subcribing was being made. So I ran I thought that having all this set up would result in a successful build of the map. However, when I ran gmapping and replayed the bag that I had recorded I got this error: When the bag stopped replaying and I attempted to save the map, no map was saved and it just kept "Waiting for map". Also, during the process of 'building' the map, I tried to visualize it on rviz but again, I got a warning message telling me "Map is not found". Can anyone help me identify the fault and explain what is going on? Thanks! EDIT From what I can see from this EDIT I run the sicktoolbox_wrapper node as follows: |
| 2016-05-08 16:06:26 -0500 | marked best answer | rosaria failed to connect to robot Hi, I want to use the RosAria package in order to send commands and interface with my robot. I have managed to successfully install and build this rosaria package and I have also tested it multiple times on simulation (by using MobileSim by MobileRobots). Now I want to connect rosaria to the actual robot, Powerbot (a pioneer robot by Adept MobileRobots). I have successfully connected to the robot ONCE by running Then I killed the node (^C) but when I tried to connect to it once again by re-running the same line (above), I got this error: Now $USER is a member of the In the error it is suggesting that I check that ~port parameter is correct, but I'm sure it is since I ran the same command previously. Can somebody help me understand this please? Thanks! |
| 2016-04-11 10:25:25 -0500 | received badge | ● Famous Question (source) |
| 2016-03-17 16:31:47 -0500 | received badge | ● Famous Question (source) |
| 2016-03-17 16:31:47 -0500 | received badge | ● Notable Question (source) |
| 2015-12-06 09:51:18 -0500 | received badge | ● Famous Question (source) |
| 2015-11-03 01:34:44 -0500 | received badge | ● Notable Question (source) |
| 2015-11-03 01:34:44 -0500 | received badge | ● Popular Question (source) |
| 2015-11-03 01:31:47 -0500 | received badge | ● Notable Question (source) |
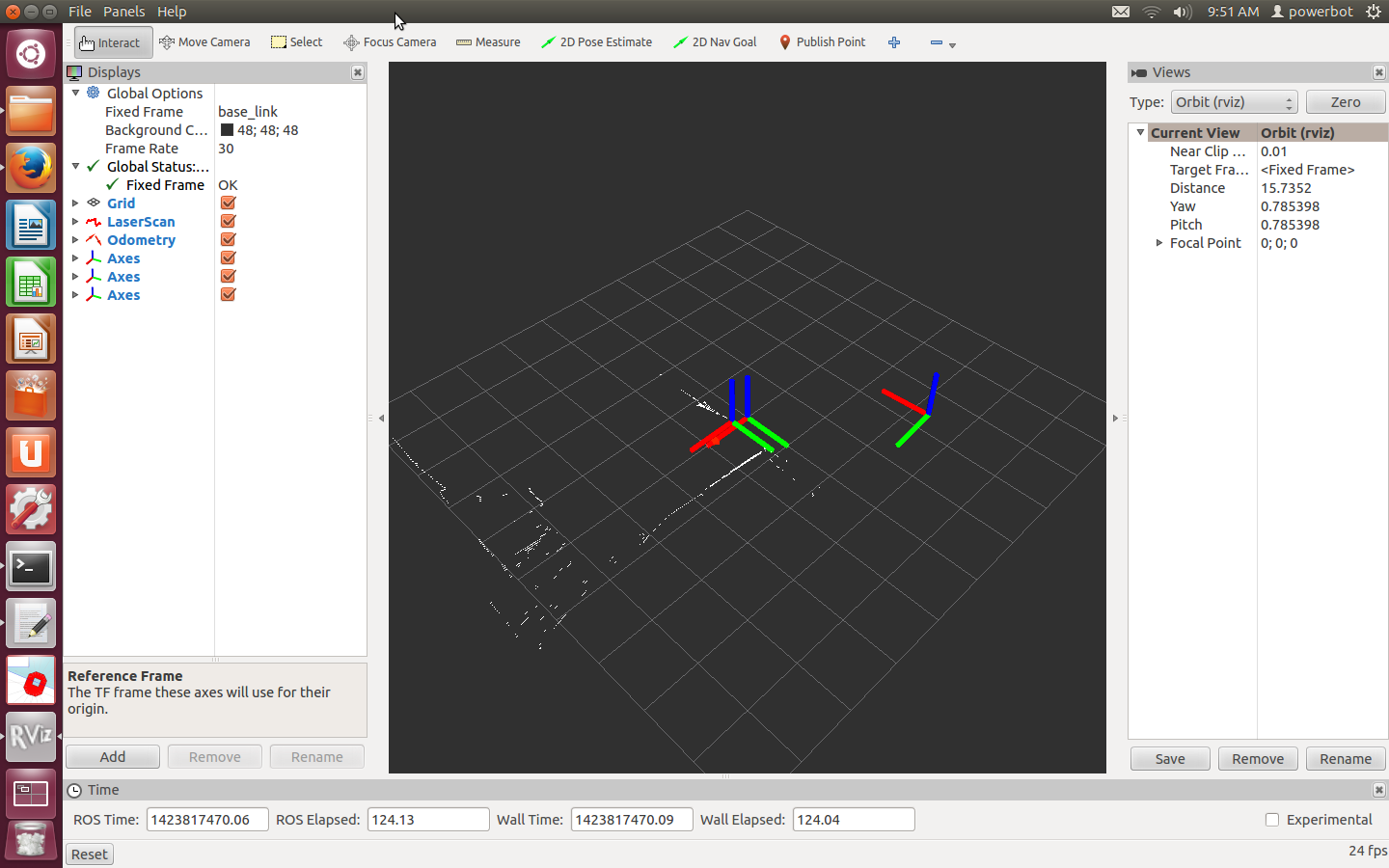
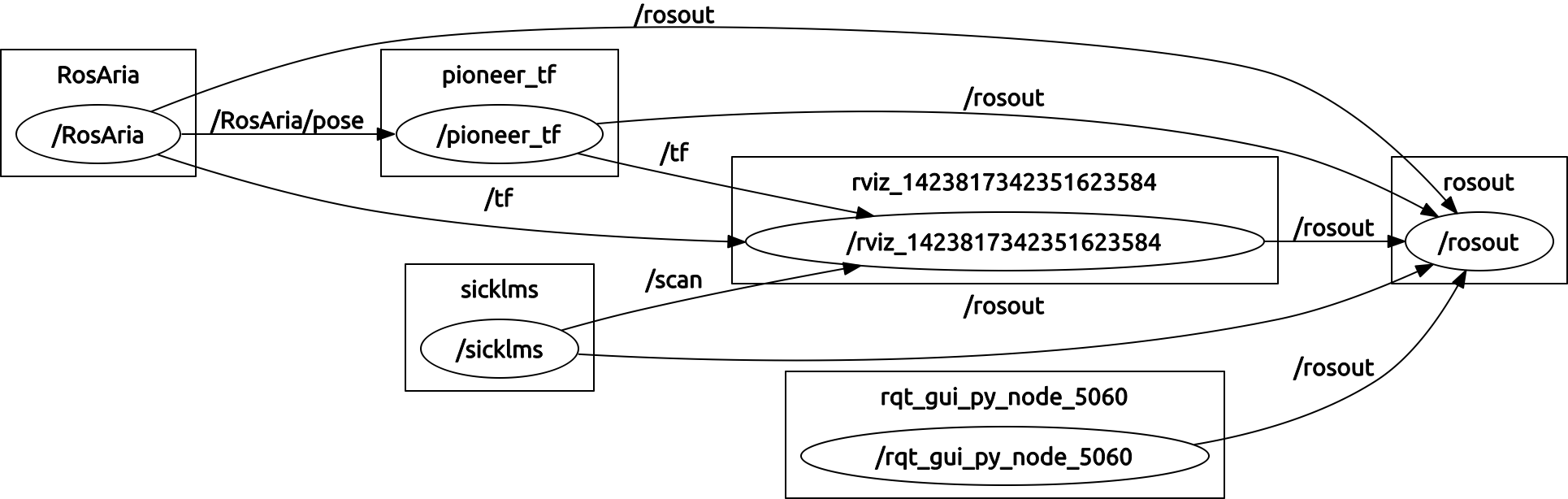
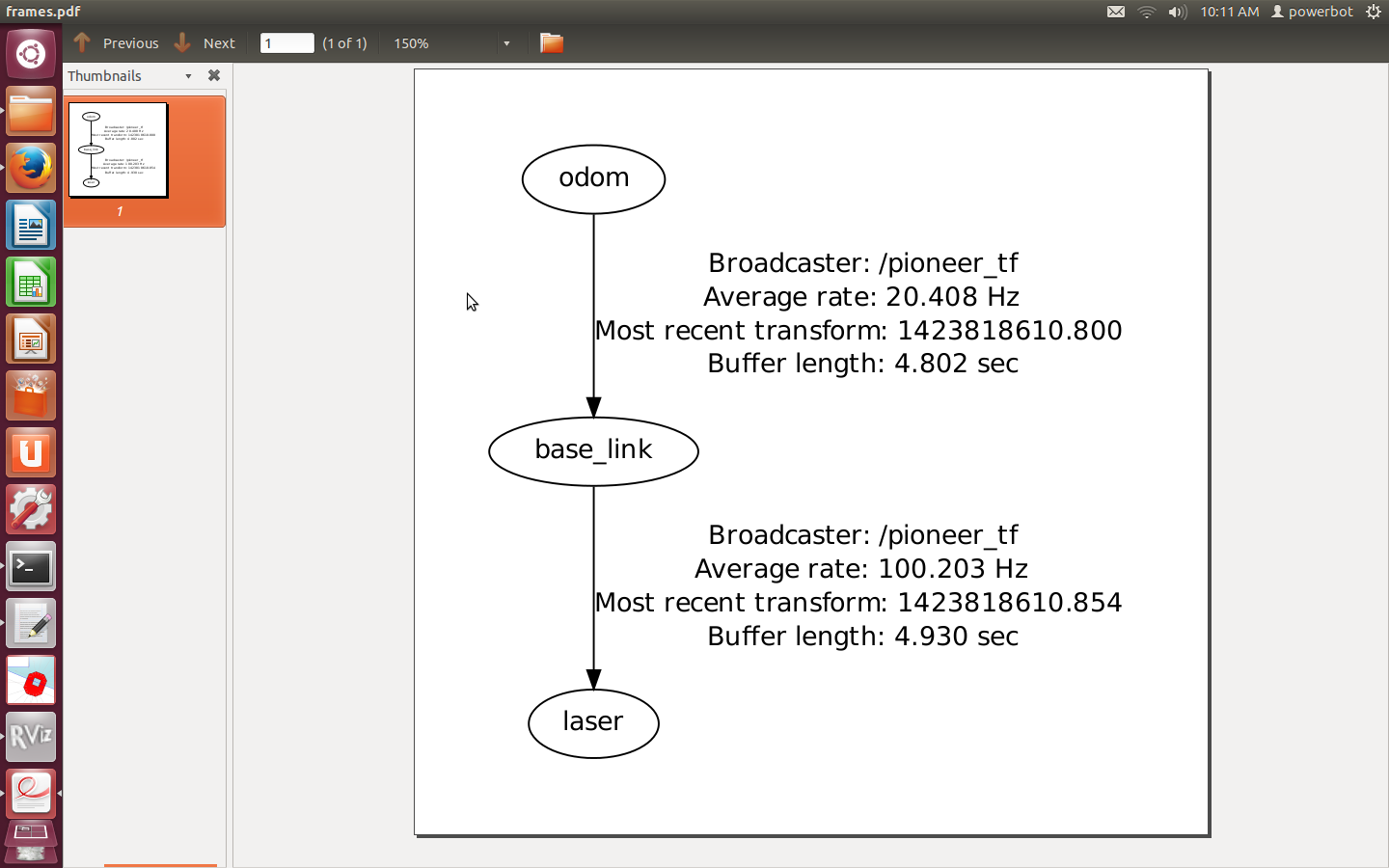
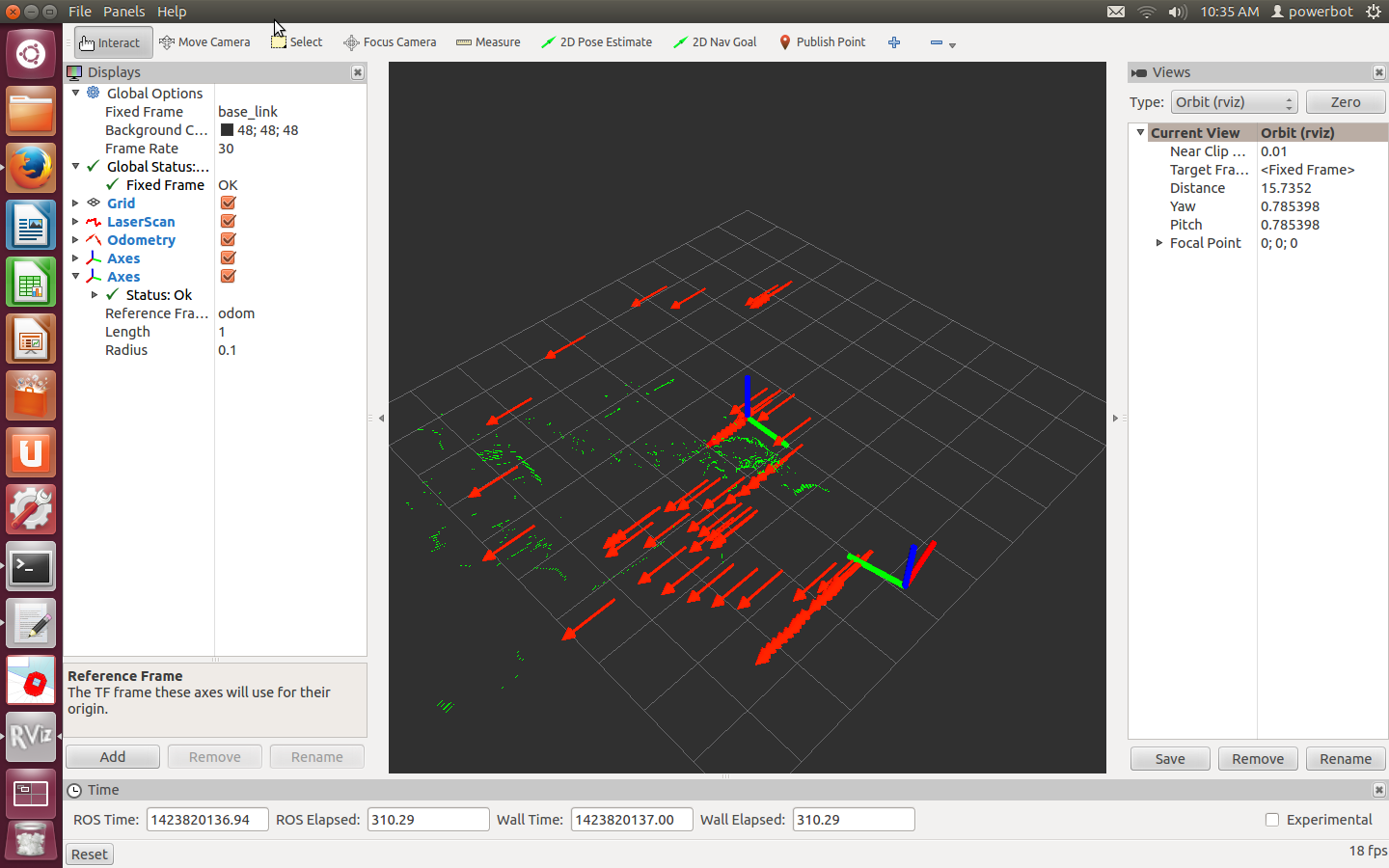
| 2015-11-01 02:26:38 -0500 | marked best answer | Odom Axes not in line with base_link Hi, I am using Powerbot to be able to build a map using gmapping algorithm. To setup my robot, I am using the ROSARIA package to be able to have control on the motors, get pose estimates from odometry etc. This is an ROS wrapper for the ARIA library provided by ActivMedia mobilerobots. I am aware that I need some tf configuration in order to align the odometry frame with the base_link and to align the laser frame with base_link frame. I have followed the tutorials and I have understood the concept. I came across this tutorial and followed it to be able to create my transforms while using ROSARIA. However, in doing so, I have noticed that the odometry axes is not aligned with the base_link axes. The laser axes are aligned perfectly as can be seen in this screenshot. The odometry axes as the ones far off from the other two. I am aware that ROSARIA publishes its own tf as can be seen from rosgraph.png. The current transform tree according to my code is this. The code that I am using to build the transformations is the following: Of course, the maps created using this setup are a mess. This happens after I move the robot with the joystick for a bit. Initially, on starting up ROSARIA and the transform node the axes are aligned. It is only after the robot moves that they lose their alignment. Can someone help me understand what is wrong with my transform tree and how can I fix this? Thanks! EDIT This is a typical example of what happens to my robot's odometry when I drive it around a little bit. Basically, it moved forwards, then turned around a desk and then moved forwards some more. I do not expect such bad odometry. |
| 2015-09-04 10:15:55 -0500 | received badge | ● Famous Question (source) |
| 2015-07-13 17:32:50 -0500 | received badge | ● Popular Question (source) |
| 2015-07-13 17:32:50 -0500 | received badge | ● Notable Question (source) |
| 2015-07-08 11:28:29 -0500 | commented question | rosaria failed to connect to robot can you specify the error that you are getting? |
| 2015-07-08 02:29:07 -0500 | commented question | rosaria failed to connect to robot @anirban you can either follow the above comments, or check that the port you are using is valid. How are you connecting to rosaria? |
| 2015-06-18 07:47:09 -0500 | commented answer | move_base without base_local_planner How do you configure the Costmap2DROS to work with navfn in code? I need to give a goal to navfn and obtain its planned path. I have opened a question here: navfn question |
| 2015-06-18 07:35:15 -0500 | commented question | navfn and costmap_2d Shall I place the code in a separate file? I would need others to see this code since I do not know what I'm doing wrong. |
| 2015-06-18 05:22:32 -0500 | asked a question | navfn and costmap_2d Hello, I am trying to use the classes navfn::NavfnROS and costmap_2d::Costmap2DROS in order to calculate a path from a start location to a goal location. I need to do this such that I can evaluate the paths to a set of goals in the world. I have implemented the following code: In this code I am attempting to get the global costmap of the current map and use it to plan a path by navfn. However, the output on my console is this: |
| 2015-06-12 12:43:43 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}