
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-01-14 02:55:37 -0500 | marked best answer | Help with IMU orientation Hi, I am trying to integrate IMU on the pioneer robot. I am using the BNO055 IMU sensor. For visualization I created a child_link from the base_link. The IMU is oriented with axes aligned to front (x axis), left (y axis) and top (z axis) from the sensors data sheet(pg.24). And my launch file for the robot is: The imu_link properly shows the orientation as same as the base_link. However, when I launch the imu node, the orientation of the imu is incorrect. Its been shown as rotated 180 degrees. I am not sure what am I doing wrong. My final goal is to use the robot_localization package to fuse the wheel odometry and imu sensor messages. But I am stuck for now. Thanks |
| 2020-12-14 01:34:22 -0500 | received badge | ● Nice Answer (source) |
| 2019-10-10 05:06:42 -0500 | received badge | ● Nice Answer (source) |
| 2019-08-28 07:09:45 -0500 | marked best answer | how to improve maps from octomap? Hi , I am trying to build quality maps by using octomap on ROS hydro using a xtion pro live sensor mounted on the robot. The map generated by octomap do not update well, when visiting the same area and corrupts the map. I am doing this on a p3dx pioneer robot. My octomap_mapping.launch file looks like this </launch> Can someone help me and suggest ideas as to how I can improve the maps generated by octomap. Thanks Alex |
| 2019-06-10 04:58:47 -0500 | commented answer | apt update fails / cannot install pkgs: key not working? this helped me. Thanks a lot. |
| 2019-05-03 15:44:34 -0500 | received badge | ● Notable Question (source) |
| 2019-05-03 15:44:34 -0500 | received badge | ● Famous Question (source) |
| 2019-03-12 12:33:39 -0500 | received badge | ● Famous Question (source) |
| 2019-01-25 19:05:00 -0500 | received badge | ● Popular Question (source) |
| 2018-12-16 19:44:18 -0500 | asked a question | Symbol lookup error - slam_gmapping Symbol lookup error - slam_gmapping Hi, I am using ROS kinetic on Ubuntu 16. I have slam_gmapping and openslam_gmappin |
| 2018-12-16 19:38:09 -0500 | marked best answer | Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for openslam and slam_gmapping using the command
However, whenever I am trying to use the gmapping node with ROS, it always throws the following error I am unable to figure out how do I solve this problem. My environment variables are properly defined in the bashrc. Thanks Edit 1: Edit 2: My environment is set as follows: all binary packages installed in and my custom package are inside the last two lines in my bashrc contains the following lines: The gmapping works when i do
Edit 3: Following @gvdhoorn's advice I cleaned my |
| 2018-12-16 06:31:05 -0500 | received badge | ● Famous Question (source) |
| 2018-12-15 23:33:21 -0500 | commented question | Error launching Gmapping node on ROS Hi @gvdhoorn, please add that as an answer. I will post another question for the new problem. Thanks. |
| 2018-12-13 23:33:22 -0500 | commented question | Error launching Gmapping node on ROS No I don't have them in catkin_ws. |
| 2018-12-13 23:33:08 -0500 | commented question | Error launching Gmapping node on ROS No I don't have them in catkin_ws. |
| 2018-12-13 22:20:18 -0500 | edited question | Error launching Gmapping node on ROS Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for opensl |
| 2018-12-13 22:20:05 -0500 | edited question | Error launching Gmapping node on ROS Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for opensl |
| 2018-12-13 22:19:36 -0500 | commented question | Error launching Gmapping node on ROS Hi, @gvdhoorn, This partially solved my problem, but I am getting a new error now. Please see Edit 3 in the question. |
| 2018-12-13 22:18:14 -0500 | edited question | Error launching Gmapping node on ROS Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for opensl |
| 2018-12-13 08:28:35 -0500 | commented question | Error launching Gmapping node on ROS Hi thanks, I do not have access to the PC right now, I will report back tomorrow. Many thanks. |
| 2018-12-13 07:52:25 -0500 | edited question | Error launching Gmapping node on ROS Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for opensl |
| 2018-12-13 07:42:48 -0500 | edited question | Error launching Gmapping node on ROS Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for opensl |
| 2018-12-13 07:42:48 -0500 | received badge | ● Associate Editor (source) |
| 2018-12-13 07:42:14 -0500 | edited question | Error launching Gmapping node on ROS Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for opensl |
| 2018-12-13 07:41:47 -0500 | commented question | Error launching Gmapping node on ROS No I just have one workspace i.e. catkin_ws/src where I put all other packages. Rest all other packages are binary insta |
| 2018-12-13 07:37:04 -0500 | edited question | Error launching Gmapping node on ROS Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for opensl |
| 2018-12-13 04:18:06 -0500 | received badge | ● Notable Question (source) |
| 2018-12-13 01:00:06 -0500 | commented question | Error launching Gmapping node on ROS Sorry for that. following your advice I can find the slam_gmapping node. Sourcing the catkin_ws/devel/setup.bash, I am g |
| 2018-12-13 00:56:32 -0500 | commented question | Error launching Gmapping node on ROS Sorry for that. following your advice I can find the slam_gmapping node. Sourcing the catkin_ws/devel/setup.bash, I am g |
| 2018-12-12 08:22:54 -0500 | commented question | Error launching Gmapping node on ROS rosrun gmapping slam_gmapping gives the same error that slam_gmapping node not found. |
| 2018-12-12 08:21:27 -0500 | commented question | Error launching Gmapping node on ROS $ ls -al /opt/ros/kinetic/lib/gmapping total 944 drwxr-xr-x 2 root root 4096 12月 7 13:00 . drwxr-xr-x 213 root roo |
| 2018-12-12 08:20:43 -0500 | commented question | Error launching Gmapping node on ROS Hi ls -al /opt/ros/kinetic/lib/gmapping total 944 drwxr-xr-x 2 root root 4096 12月 7 13:00 . drwxr-xr |
| 2018-12-12 08:20:19 -0500 | commented question | Error launching Gmapping node on ROS $ ls -al /opt/ros/kinetic/lib/gmapping total 944 drwxr-xr-x 2 root root 4096 12月 7 13:00 . drwxr-xr-x 2 |
| 2018-12-12 08:20:09 -0500 | commented question | Error launching Gmapping node on ROS $ ls -al /opt/ros/kinetic/lib/gmapping total 944 drwxr-xr-x 2 root root 4096 12月 7 13:00 . drwxr-xr-x 213 root root |
| 2018-12-12 08:06:37 -0500 | commented question | Error launching Gmapping node on ROS Hi I edited the question, also sorry for the previous comment I put a wrong command for grep gmapping please check edit1 |
| 2018-12-12 08:00:38 -0500 | received badge | ● Popular Question (source) |
| 2018-12-12 07:58:15 -0500 | edited question | Error launching Gmapping node on ROS Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for opensl |
| 2018-12-12 07:57:31 -0500 | commented question | Error launching Gmapping node on ROS Hi I edited the question, also sorry for the previous comment I put a wrong command for grep gmapping |
| 2018-12-12 07:51:04 -0500 | commented question | Error launching Gmapping node on ROS Hi Thanks Yes I ran the full command and the result is same : gmapping: command not found |
| 2018-12-12 07:20:18 -0500 | commented question | Error launching Gmapping node on ROS hi, grep | gmapping gives : gmapping: command not found but when I run : rospack gmapping it returns /opt/ros/kineti |
| 2018-12-12 07:11:25 -0500 | commented question | Error launching Gmapping node on ROS hi, grep | gmapping gives : gmapping: command not found |
| 2018-12-11 22:47:32 -0500 | asked a question | Error launching Gmapping node on ROS Error launching Gmapping node on ROS Hi, I am using ROS kinetic on ubuntu 16 and have installed the binaries for opensl |
| 2018-04-29 21:57:32 -0500 | marked best answer | Calibrating Pioneer P3DX robot for ROSARIA Hi All, I am now setting up a new Pioneer 3DX with kinect and URG laser sensor. I have so far managed to put all the sensors and connect them via rosaria. I would now like to do odometry calibration of the mobile base. Does anyone know how to do it. There are no specific tutorials available on the ros wiki page. Also what are the optimum values of (TicksMM, DriftFactor, RevCount) for P3DX mobile robot. At present when I run the rosaria node I get the settings like this: TicksMM - 128 DriftFactor - 0 RevCount - 16570 I can change these values using dynamic_reconfigure. I need the optimum values for this particular model. And how do I permanently change these parameters everytime I launch the rosaria node. Can someone explain me the process. Basically I believe the robots odometry is not good when its turning, how do I correct that. Thanks |
| 2018-01-11 20:12:00 -0500 | received badge | ● Famous Question (source) |
| 2017-12-20 00:03:06 -0500 | marked best answer | Need suggestions for calibrating Asus Xtion Pro live sensor Hi, I want suggestions from experts here to calibrate the asus xtion pro live sensor. I am running ROS Hydro on Ubuntu 12.04. Also I want to mention I am using openni2 to run the sensor. I read the camera intrinsic and extrinsic calibration tutorial on ros wiki but most of them are written for the kinect sensor. Can anyone here, help me or point me in right direction into how to correctly calibrate the xtion pro live on ROS Hyro? What are the steps I should be careful of? Any blog or video which you can point out giving detailed tutorial and process of calibration. Thanks Alex |
| 2017-12-01 03:21:39 -0500 | commented question | Help with IMU orientation Hi, Sorry for the late reply. You were right, I somehow screwed up the urdf definition and found that I was defining th |
| 2017-10-28 08:09:42 -0500 | received badge | ● Notable Question (source) |
| 2017-10-03 03:10:32 -0500 | received badge | ● Famous Question (source) |
| 2017-10-01 22:25:42 -0500 | commented question | SICK LMS1XX connectivity issue lms111 ROS kinetic Did you solved this problem? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
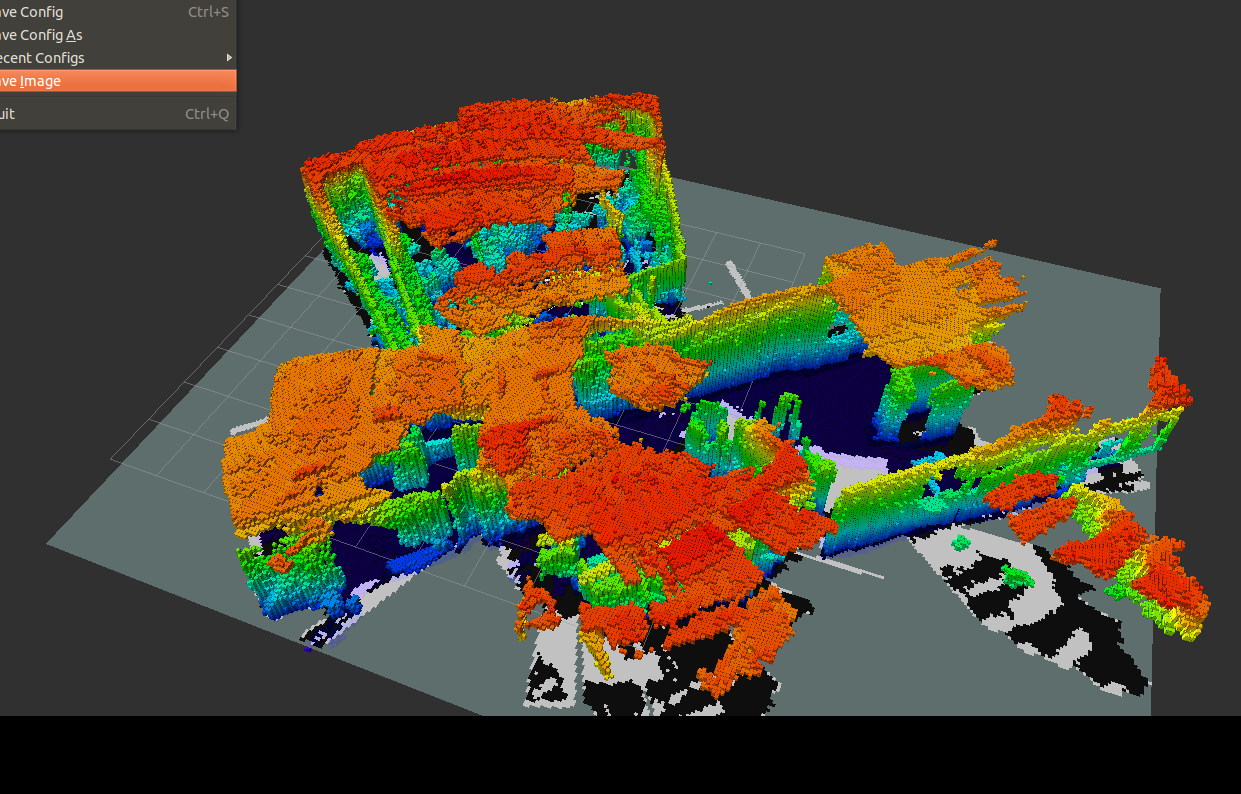 . I am using gmapping for SLAM with a Hokuyo sensor. The 2d grid map builds up nicely and updates but the octomap overlays the map and do no update.
. I am using gmapping for SLAM with a Hokuyo sensor. The 2d grid map builds up nicely and updates but the octomap overlays the map and do no update.