The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-08-01 05:28:28 -0500 | received badge | ● Famous Question (source) |
| 2021-07-15 07:09:32 -0500 | received badge | ● Good Question (source) |
| 2021-01-13 22:17:32 -0500 | received badge | ● Nice Question (source) |
| 2020-12-14 00:49:25 -0500 | marked best answer | How to pause a mobile robot during navigation? Dear all, How to pause a mobile robot during navigation? How to make the robot restore after the pause? In my application, I expect the robot can pause for some while after I set the navigation goal. And restore into the navigation process after the pause. I am now using turtlebot with ROS navigation stack. Best Regards, Jack |
| 2019-02-11 18:05:17 -0500 | marked best answer | What's the function of the symbol '&' after roscore? The statement 'roscore &' offten appears before 'rosparam set /use_sim_time true'. What's the function of the symbol |
| 2019-02-01 00:50:27 -0500 | received badge | ● Nice Question (source) |
| 2018-09-19 14:19:34 -0500 | marked best answer | Is there any opensource hardware mobile robot platform? Is there any opensource hardware mobile robot platform? Like irobot create2, or Pioneer P3-DX? |
| 2018-07-04 22:04:04 -0500 | received badge | ● Famous Question (source) |
| 2018-01-13 01:51:30 -0500 | received badge | ● Famous Question (source) |
| 2018-01-11 22:41:25 -0500 | received badge | ● Notable Question (source) |
| 2018-01-11 20:19:54 -0500 | marked best answer | What does the "depth" mean on earth? I am really confused about the meaning of "depth" which is acquired by a RGB-D camera. I think there are two meanings, 1: The distance from a point in the 3-D world to the infrared camera center. 2: The Z value of the 3-D world point in the camera frame. Which is right? If the second meaning is right, the depth values of all the points in a wall which is parallel with the RGB-D camera should be equal, but the fact is not like that. However, many 3-D vision books indicate the second meaning is right. I am really confused. Who can help me? |
| 2017-12-05 16:50:08 -0500 | marked best answer | How can I use ROS with arduino robot? I have an arduino robot and a Raspberry Pi. I note that there is a package called ROS arduino. How can I develop a ROS driver to control my arduino robot? |
| 2017-09-13 19:29:16 -0500 | received badge | ● Famous Question (source) |
| 2017-06-23 16:21:07 -0500 | received badge | ● Famous Question (source) |
| 2017-06-21 12:47:42 -0500 | received badge | ● Famous Question (source) |
| 2017-04-20 14:18:33 -0500 | marked best answer | Does there exist any navigation package except the ROS navigation? Does there exist any navigation package except the ROS navigation? |
| 2017-04-20 14:11:21 -0500 | marked best answer | Does ROS navigation stack need wheel encoder? I have a mobile robot without wheel encoder. I have a 2D laser range finder. I want to run ROS navigation on this robot. I notice that amcl can provide tf between Does ROS navigation stack need wheel encoder? How can I run the navigation stack on this robot? |
| 2017-04-20 13:58:06 -0500 | marked best answer | How to communicate between multiple ROS master? I have two PCs in one robot. The PCs are connected using one router. PC1 is selected as ROS master. I have another two PCs in another robot. The PCs are connected using another router. PC3 is selected as ROS master. How to communicate between the ROS sub-networks? How to avoid name conflict? |
| 2017-04-20 13:54:06 -0500 | marked best answer | Mini mobile robot with mini PC I want to make a mini mobile robot with a mini PC which can run ubuntu. Is there any opensource hardware product? |
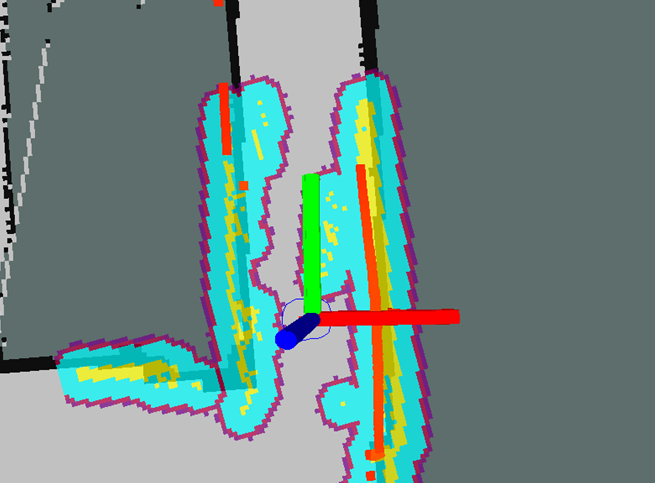
| 2017-04-19 17:52:46 -0500 | marked best answer | Using move_base for navigation, obstacle cannot be cleared timely Dear all, I am using move_base for navigation with a SICK laser scanner. I have set the local cost map update frequency to 30Hz. However, the obstacle cannot be cleared timely when the obstacle such as a walking person moved away. The costmap will not be updated until the robot move. For example, in the attached figure. The walking person in the green axis has moved away, but the costmap cannot clear the obstacle timely. Thus, the robot will be stuck in the virtual corner. The red axis is the robot heading direction.
The parameter settings are: move_base parameters: Thank you very much, Jack |
| 2017-02-05 21:37:16 -0500 | marked best answer | What does the Fixed Frame mean in rviz? What does the Fixed Frame mean in rviz? |
| 2017-01-21 10:20:25 -0500 | received badge | ● Famous Question (source) |
| 2016-12-17 13:31:35 -0500 | received badge | ● Famous Question (source) |
| 2016-11-06 06:14:24 -0500 | received badge | ● Notable Question (source) |
| 2016-11-05 16:23:23 -0500 | received badge | ● Popular Question (source) |
| 2016-11-05 08:34:52 -0500 | received badge | ● Associate Editor (source) |
| 2016-11-05 08:34:28 -0500 | asked a question | How to record the movement of robot arm? How to record the movement of a robot arm am play it back? I am using a kinova jaco arm. Is there any available stack for the movement recording? |
| 2016-07-29 01:25:02 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.