The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-05-25 01:49:07 -0500 | received badge | ● Good Answer (source) |
| 2022-06-22 15:16:56 -0500 | received badge | ● Self-Learner (source) |
| 2020-08-23 00:48:18 -0500 | received badge | ● Famous Question (source) |
| 2019-06-11 09:36:27 -0500 | received badge | ● Famous Question (source) |
| 2019-05-20 08:56:32 -0500 | received badge | ● Nice Answer (source) |
| 2019-05-20 02:26:57 -0500 | marked best answer | mavros offboard no GPS Hi, have recently been trying to control a rover equipped with a Pixhawk2 in an indoor environment. After running a script similar to the tutorial one, I was able to switch to offboard mode, see below the echo of topic /mavros/state However, the mavros node interfacing with the rover is printing the following output: I have tried to set this position with no success. If any of you have managed to run a px4/apm robot in an offboard mode with no GPS I would be grateful for information on:
Thanks for any help. |
| 2019-04-16 04:25:45 -0500 | received badge | ● Famous Question (source) |
| 2019-04-04 05:07:40 -0500 | received badge | ● Great Answer (source) |
| 2019-04-04 05:07:40 -0500 | received badge | ● Guru (source) |
| 2018-11-19 23:48:25 -0500 | received badge | ● Good Question (source) |
| 2018-11-15 17:18:40 -0500 | received badge | ● Notable Question (source) |
| 2018-11-15 08:30:12 -0500 | received badge | ● Popular Question (source) |
| 2018-11-15 04:19:22 -0500 | commented question | Callback not updating class member variable It is part of a larger program which I cannot put here. I detailing the symptoms to see if anyone has encountered someth |
| 2018-11-15 03:49:01 -0500 | asked a question | Callback not updating class member variable Callback not updating class member variable I have encountered a strange problem. I have a standard class class A{ pub |
| 2018-07-20 02:38:57 -0500 | received badge | ● Famous Question (source) |
| 2018-04-29 22:49:36 -0500 | received badge | ● Famous Question (source) |
| 2018-04-26 23:55:21 -0500 | received badge | ● Famous Question (source) |
| 2018-04-26 23:55:21 -0500 | received badge | ● Notable Question (source) |
| 2018-04-05 14:40:26 -0500 | commented question | Robot with raspberry pi and ROS Hi, I am also building a robot with raspberry pi. Let me know of your progress and maybe I can give you some pointers if |
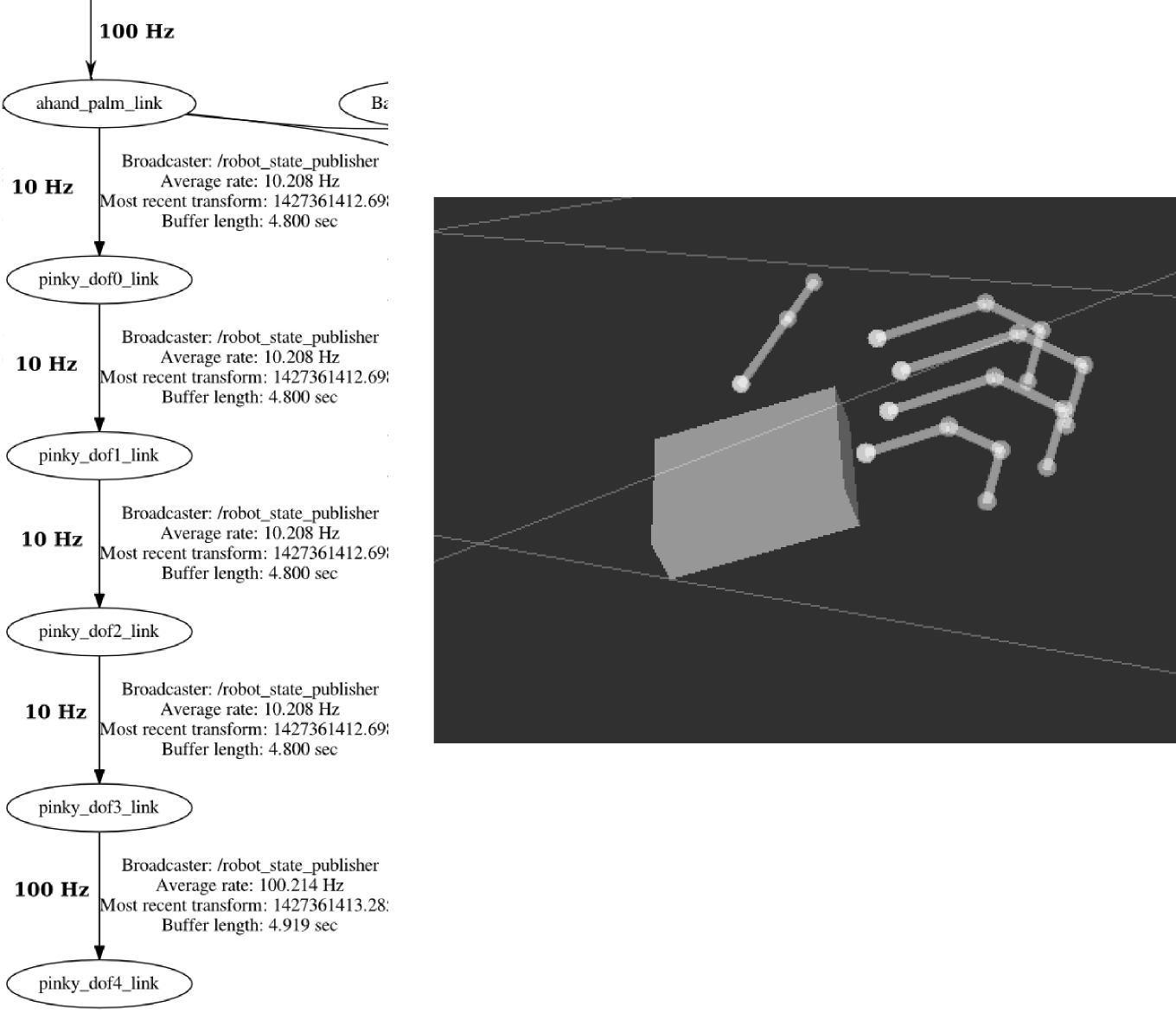
| 2018-02-06 02:45:02 -0500 | marked best answer | robot_state_publisher link publish frequency not consistent I have a urdf model of a human hand in Rviz for which I update its position via my own tf broadcaster. I have noticed that when I move the hand the fingers lag behind the wrist. I am updating the position of the wrist at 100 Hz and in my launch file, I set the parameter of robot_state_publisher to 100 Hz as well. When I look at the rate at wich the tf frames are being published (from rosrun tf view_frames) the update of the palm (first link) is at 100 Hz and the last link "pinky_dof_4" is also updated at 100 Hz. However everything in between is being updated at 10 Hz. I would like to get all links in the URDF to be updated at 100 Hz.
|
| 2017-12-22 07:35:03 -0500 | received badge | ● Necromancer (source) |
| 2017-11-21 04:11:40 -0500 | received badge | ● Famous Question (source) |
| 2017-10-18 09:06:46 -0500 | received badge | ● Nice Answer (source) |
| 2017-10-05 18:47:42 -0500 | received badge | ● Famous Question (source) |
| 2017-10-05 12:49:34 -0500 | received badge | ● Notable Question (source) |
| 2017-10-05 12:49:34 -0500 | received badge | ● Popular Question (source) |
| 2017-08-22 03:29:41 -0500 | commented question | mavros offboard no GPS @jayess, not sure either. I will ask on the px4 forum and see if anybody has an idea. |
| 2017-08-21 16:57:46 -0500 | edited question | mavros offboard no GPS mavros offboard no GPS Hi, have recently been trying to control a rover equipped with a Pixhawk2 in an indoor environmen |
| 2017-08-21 16:57:10 -0500 | asked a question | mavros offboard no GPS mavros offboard no GPS Hi, have recently been trying to control a rover equipped with a Pixhawk2 in an indoor environmen |
| 2017-06-02 09:29:10 -0500 | received badge | ● Notable Question (source) |
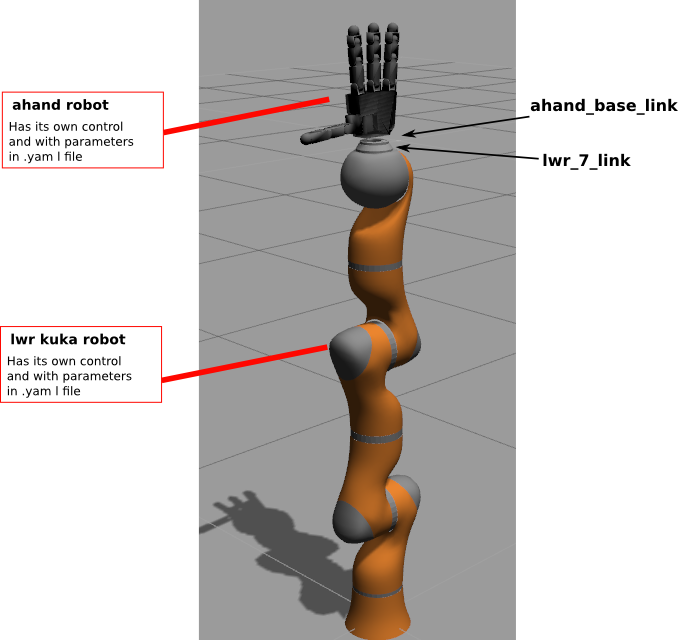
| 2017-05-19 01:11:37 -0500 | marked best answer | multiple robots and ros_control I am trying to spawn two different robot models, one is a robotic arm (lwr kuka) and the other is a robotic hand manipulator (allegro hand), with their own controllers. I can load and control both robots independently from one another at the moment. See the figure bellow for an idea of the setup. My goal is to be able to control these two connected robots with their own separate controllers.
I have seen the discussion regarding spawning multiple turtle-bots, but my situation is different. I want the two robots (arm and hand) to be connect by a link (from arm eof to hand base) but controlled separately. Here is the description of my launch file robots.lauch: Here are two launch files of the independent robots lwr_kuka.lauch and ahand.launch To connect both of them I tried to change the parent link in my ahand_init.xacro to be the last link of the robot arm. This not a workable solution. It seems that the full description of the robot (both arm and hand) have be defined in a single .xacro file and cannot be combine in a roslaunch file. Is this an accurate observation ? It would be great if a robot could be assembled in the roslaunch file, especially when considering multiple possible end-effectors. Since this did not work, the back up solution is to have a kuka_ahand.xacro file which combines the two models. The problem is then shifted in how to important two controllers for one urdf robot description. I would appreciate suggestions on how to do this. I would like to have two separate .yaml files and controllers which get loaded in the launch file. Is this possible ? Proposed solution 1) connect ahand_base_link and lwr_link with a static tf broadcaster. (Edit: only works (possibly) when consider ... (more) |
| 2017-05-19 01:11:37 -0500 | received badge | ● Enlightened (source) |
| 2017-05-19 01:11:37 -0500 | received badge | ● Good Answer (source) |
| 2017-04-20 13:44:07 -0500 | marked best answer | controller_interface frequency rate I have been using the ros_control interface to implement a position controller to use both in Simulation (Gazebo) and on a real robot. My implementation inherits from control_base.h and I implement hardware_interface::PositionJointInterface. My problem is that I would like to know the frequency of the update rate (base class code shown below) such to perform interpolation between desired and target joint positions such to follow a desired velocity. Is there a method that gives me back the update rate of this function (above). Is it in the Time and Duration variables ? I have so fare failed to find a good tutorial which explains in detail the usage of control_base.h etc.. any pointers would be welcome. |
| 2017-04-20 13:43:01 -0500 | received badge | ● Notable Question (source) |
| 2017-03-31 11:09:31 -0500 | received badge | ● Nice Answer (source) |
| 2017-03-26 01:15:51 -0500 | received badge | ● Popular Question (source) |
| 2017-03-09 12:04:54 -0500 | received badge | ● Famous Question (source) |
| 2017-03-09 11:31:03 -0500 | asked a question | catkin rospy package structure Hi have been writing a ros python package with the following structure (I checked my structure against moveit_commander). When package_python is in the folder src I am able to roscd and roslaunch this package. However I would like to have package_name inside a root dummy folder python-package. When I do this I am no longer able to roscd, roslaunch, python_package. What should I do in order to have my python_package inside python-package and still be to call use it. For a C++ project this is not a problem. |
| 2017-02-27 07:41:02 -0500 | received badge | ● Notable Question (source) |
| 2017-02-10 02:11:10 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.