
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-08-25 18:38:23 -0500 | received badge | ● Famous Question (source) |
| 2021-08-25 18:38:23 -0500 | received badge | ● Notable Question (source) |
| 2021-05-30 20:39:41 -0500 | received badge | ● Good Question (source) |
| 2021-04-26 15:11:05 -0500 | received badge | ● Nice Question (source) |
| 2021-03-07 07:10:37 -0500 | received badge | ● Nice Question (source) |
| 2021-02-27 03:33:55 -0500 | received badge | ● Popular Question (source) |
| 2021-01-18 15:04:36 -0500 | commented question | Navigation stack planning global path through large unknown wall segments of map I guess that's try, I'll have to try that out and see how it works... |
| 2021-01-17 22:44:56 -0500 | commented question | Navigation stack planning global path through large unknown wall segments of map I understand that, so make the unknown space untraversable, but there's two situations where I think I need to use unkno |
| 2021-01-17 21:53:41 -0500 | commented question | Navigation stack planning global path through large unknown wall segments of map Robot radius is 0.22m. Which is correct to the size of the robot. I checked the segment of the wall where it was trying |
| 2021-01-17 13:34:42 -0500 | asked a question | Navigation stack planning global path through large unknown wall segments of map Navigation stack planning global path through large unknown wall segments of map I'm running a Turtlebot type platform w |
| 2020-10-27 00:33:30 -0500 | marked best answer | Does a node receive messages sent by itself on a topic that it is both publishing and subscribing to? I am working on writing some code for a project, but I have a node that will be continuously publishing(30 Hz) to a topic while also subscribing to the same topic to listen for a different pub from a different node. Basically, node A is listening to topic X and publishing to topic X. Meanwhile another node, node B, will at some time, publish a message to topic X. Will the subscriber callback in node A be triggered every time it publishes sometime? Also, will it be able to pick up the message if node B only publishes once? Thanks, luketheduke |
| 2020-08-26 06:49:32 -0500 | received badge | ● Popular Question (source) |
| 2020-08-21 18:25:01 -0500 | received badge | ● Famous Question (source) |
| 2020-07-02 19:33:11 -0500 | marked best answer | Node clock is off in TF lookup I'm trying to run laser_scan_matcher, but I'm getting a tf extrapolation error, except that the requested lookup time varies wildly and doesn't line up at all with my system clock. All these nodes are running on one machine. This is the error message: I've launched it several times and I've gotten several different requested times, not including the one above:
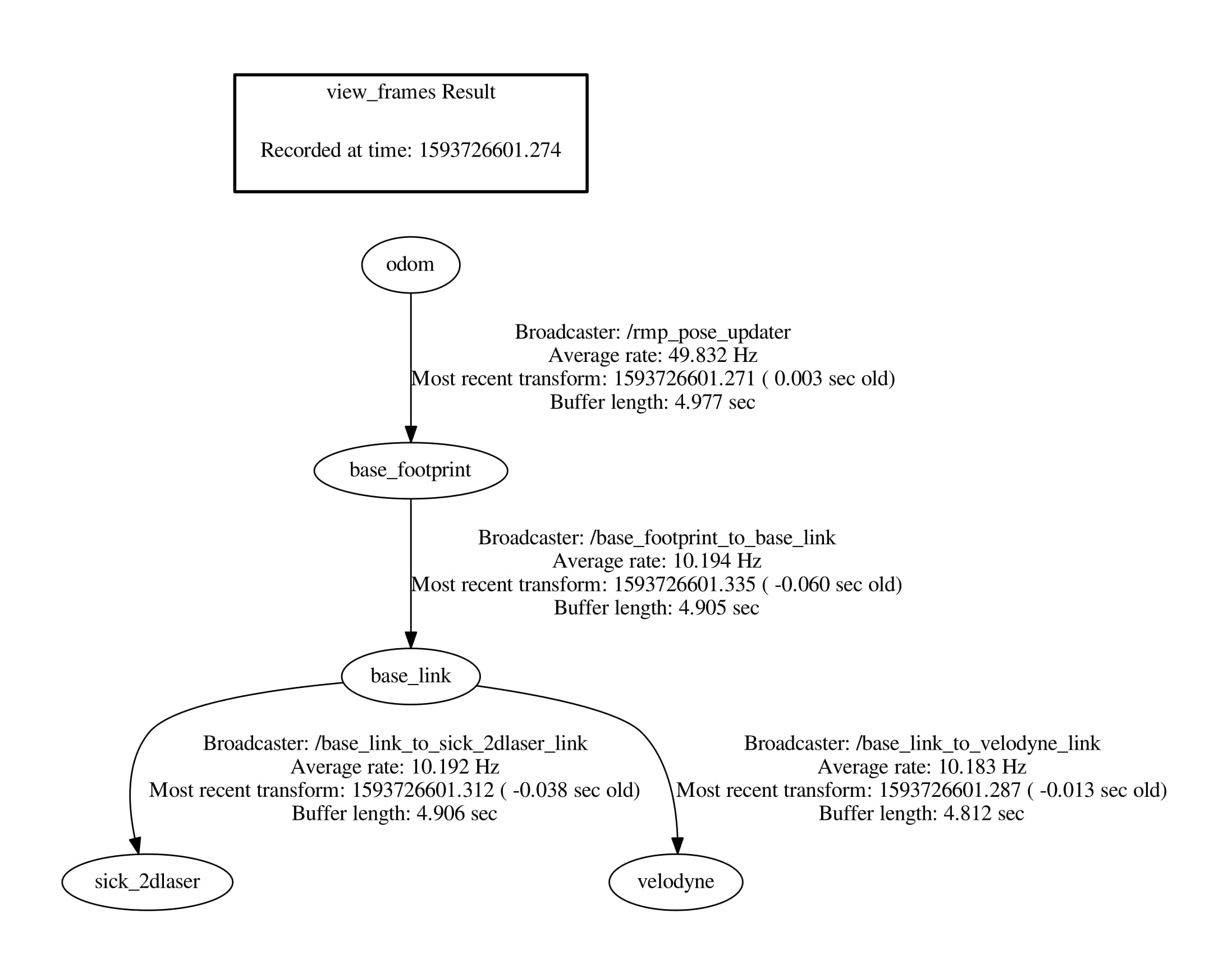
It seems like the node is just requesting random times, which is what's throwing me off. The message is being generated by one of two TF lookups in line 780-783 of the source file: https://github.com/ccny-ros-pkg/scan_... My launch file: </launch> TF Frames:
System details: ROS Kinetic Ubuntu 16.04 scan_tools v0.3.2 installed via apt. |
| 2020-07-02 19:33:08 -0500 | answered a question | Node clock is off in TF lookup Still haven't figured out what caused it, but the issue went away when I built from source, so it's possible there's an |
| 2020-07-02 19:33:08 -0500 | received badge | ● Rapid Responder (source) |
| 2020-07-02 16:52:38 -0500 | edited question | Node clock is off in TF lookup Node clock is off in TF lookup I'm trying to run laser_scan_matcher, but I'm getting a tf extrapolation error, except th |
| 2020-07-02 16:43:41 -0500 | asked a question | Node clock is off in TF lookup Node clock is off in TF lookup I'm trying to run laser_scan_matcher, but I'm getting a tf extrapolation error, except th |
| 2020-06-08 05:59:48 -0500 | received badge | ● Notable Question (source) |
| 2020-06-08 05:59:48 -0500 | received badge | ● Popular Question (source) |
| 2020-04-24 07:04:30 -0500 | marked best answer | time.sleep() in a node I have a node where I need to wait for a specific amount of time. Can I just use time.sleep() in python or do I need something else? Thanks, luketheduke |
| 2020-04-21 09:45:46 -0500 | marked best answer | Husky Gazebo robot_state_publisher not broadcasting transforms I'm trying to record a bag from the Husky Gazebo simulation for Cartographer SLAM on Kinetic and Ubuntu 18.04 VM. The problem I'm facing is that some of the TF transforms are not being included in the bag file. Here's the steps I took:
Launch the simulator: |
| 2020-04-21 09:45:42 -0500 | answered a question | Husky Gazebo robot_state_publisher not broadcasting transforms As gvdhoorn pointed out, I wasn't recording /tf_static and that meant that I wasn't recording any static TF transforms, |
| 2020-04-21 09:45:42 -0500 | received badge | ● Rapid Responder |
| 2020-04-21 09:44:25 -0500 | commented question | Husky Gazebo robot_state_publisher not broadcasting transforms I didn't know those existed. I relaunched the sim and echoed the /tf_static topic and all the missing transforms are the |
| 2020-04-20 19:25:44 -0500 | commented answer | Nvidia Jetson GPIO with ROS It depends on what approach you want to take, you could either integrate GPIO into every package that needed it or make |
| 2020-04-20 19:23:49 -0500 | asked a question | Husky Gazebo robot_state_publisher not broadcasting transforms Husky Gazebo robot_state_publisher not broadcasting transforms I'm trying to record a bag from the Husky Gazebo simulati |
| 2020-01-15 09:17:38 -0500 | commented answer | Nvidia Jetson GPIO with ROS There are several different approaches to controlling GPIO with the Jetson. Because C++ is such a low level language her |
| 2019-11-15 14:46:12 -0500 | marked best answer | Two machines one ROS master connection rejected Hi, I am trying to view Kinect data in RVIZ on a remote client in ROS. I have exported the ROS_MASTER_URI to set to the machine with the roscore running but it won't send back any data. Rviz gives this error: How can I fix this? Both machines are running Ubuntu 14.04 with Indigo. I followed this tutorial and I couldn't get them talking to each other although I can see the topics being published with |
| 2019-09-16 23:25:54 -0500 | marked best answer | usb_cam node "permission denied" when launched by robot_upstart When I launch When I look at that log it says: When I launch the node using rosrun, it works perfectly. What could be causing this issue? I am running ROS Indigo on a Beaglebone Black and Ubuntu 14.04. |
| 2019-05-07 13:50:22 -0500 | received badge | ● Enlightened (source) |
| 2019-05-07 13:50:22 -0500 | received badge | ● Good Answer (source) |
| 2019-02-05 18:43:53 -0500 | received badge | ● Notable Question (source) |
| 2019-02-05 18:43:53 -0500 | received badge | ● Famous Question (source) |
| 2018-12-13 07:39:38 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
 Any ideas on how to fix this?
Any ideas on how to fix this? Here's a close up of the problem area:
Here's a close up of the problem area: 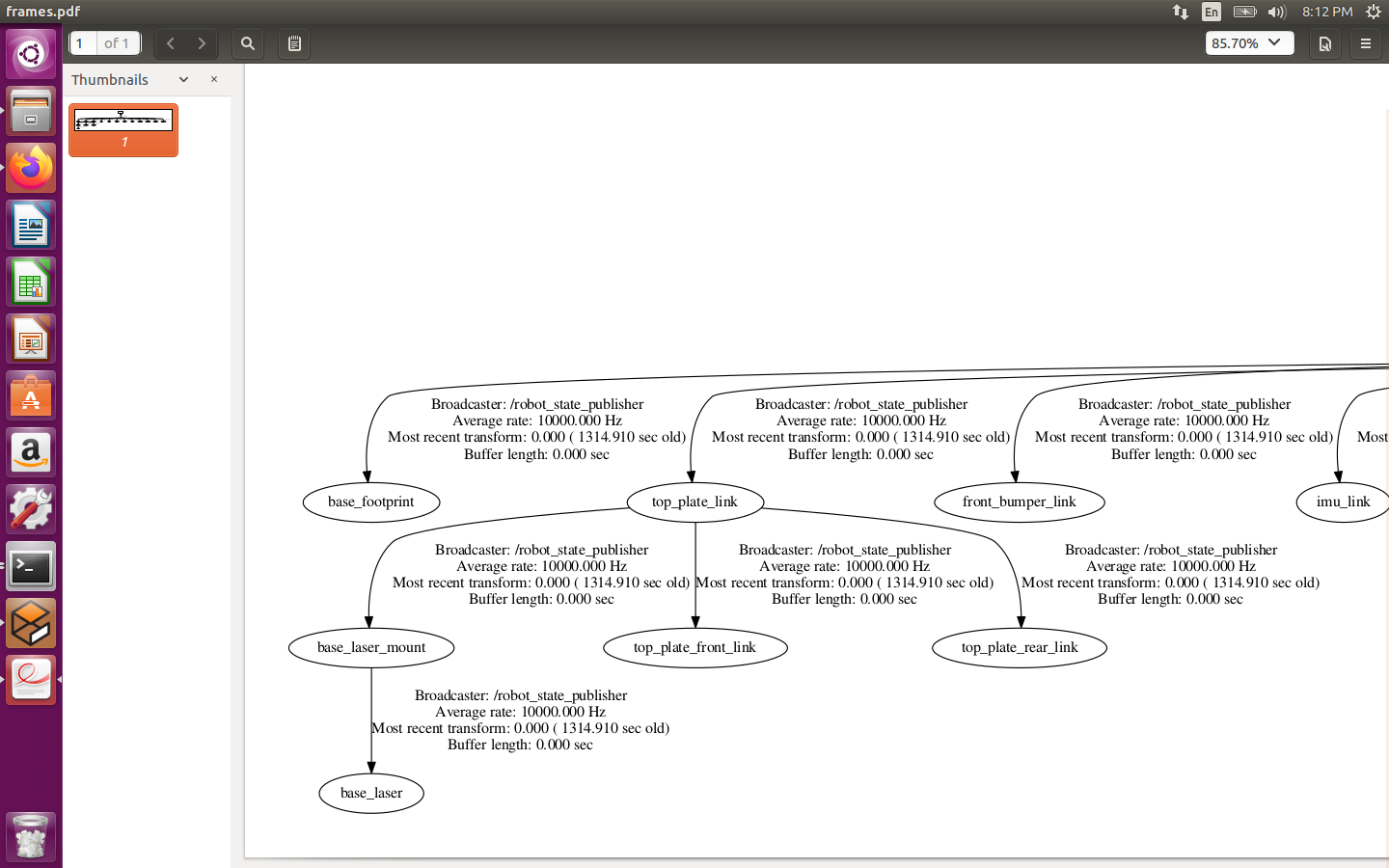 When I record a bag with
When I record a bag with 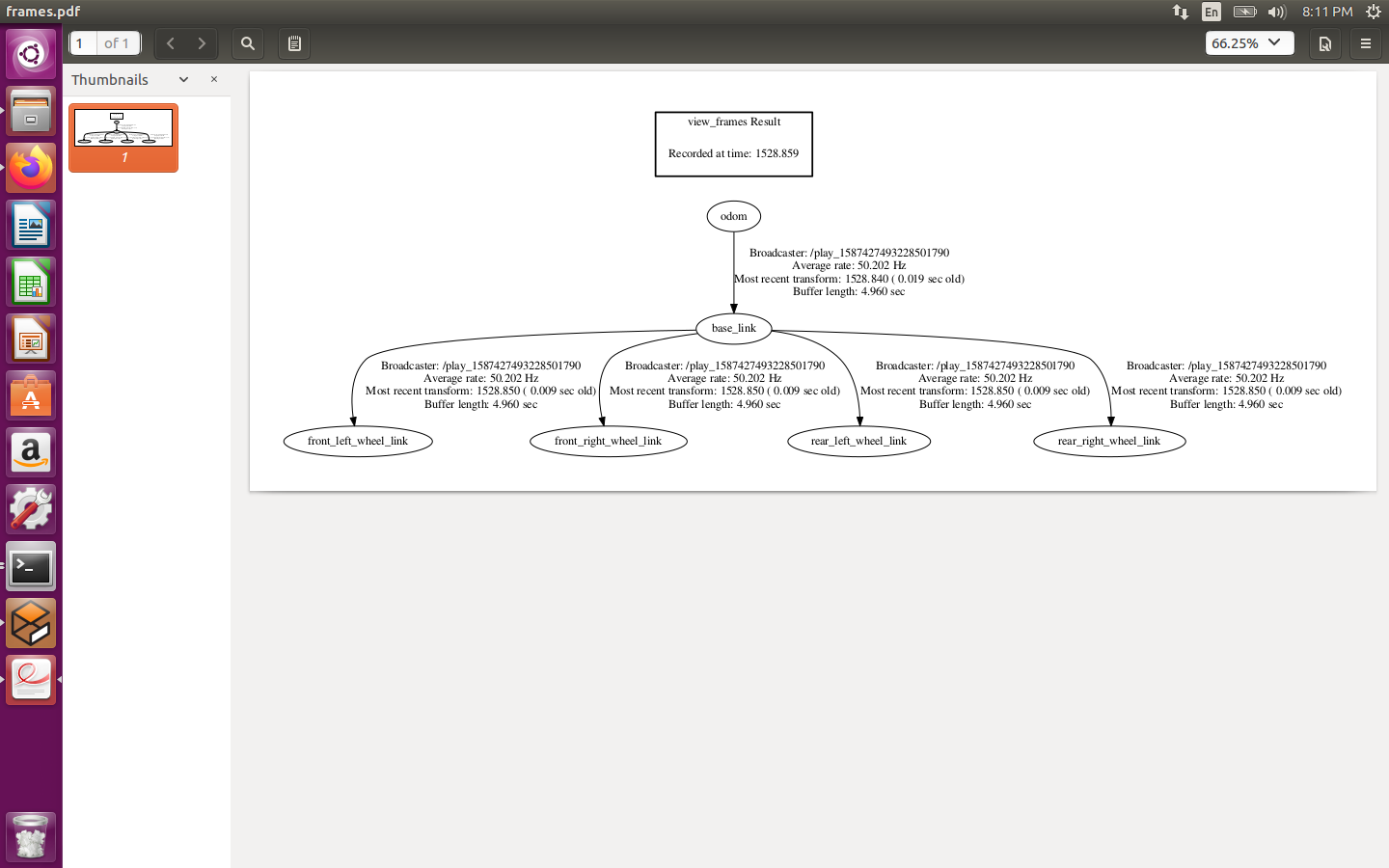 The TF tree is missing large parts, including the base_laser link, which is the one I need. I think the error is that
The TF tree is missing large parts, including the base_laser link, which is the one I need. I think the error is that