
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2015-12-20 18:21:13 -0500 | received badge | ● Taxonomist |
| 2015-08-06 02:25:23 -0500 | received badge | ● Famous Question (source) |
| 2015-06-09 22:49:57 -0500 | received badge | ● Notable Question (source) |
| 2015-06-01 16:31:20 -0500 | commented question | ROS stereo disparity issues looks like I forgot to calibrate. Will do that when I get back to the lab |
| 2015-06-01 16:30:50 -0500 | commented answer | ROS stereo disparity issues ah. yeah I completely forgot to calibrate it. When I get the calibration values, and convert them to the .yaml, where do I pass in the parameters? since this is a stereo camera, are they passed into stereo_image_proc? |
| 2015-06-01 03:38:38 -0500 | received badge | ● Popular Question (source) |
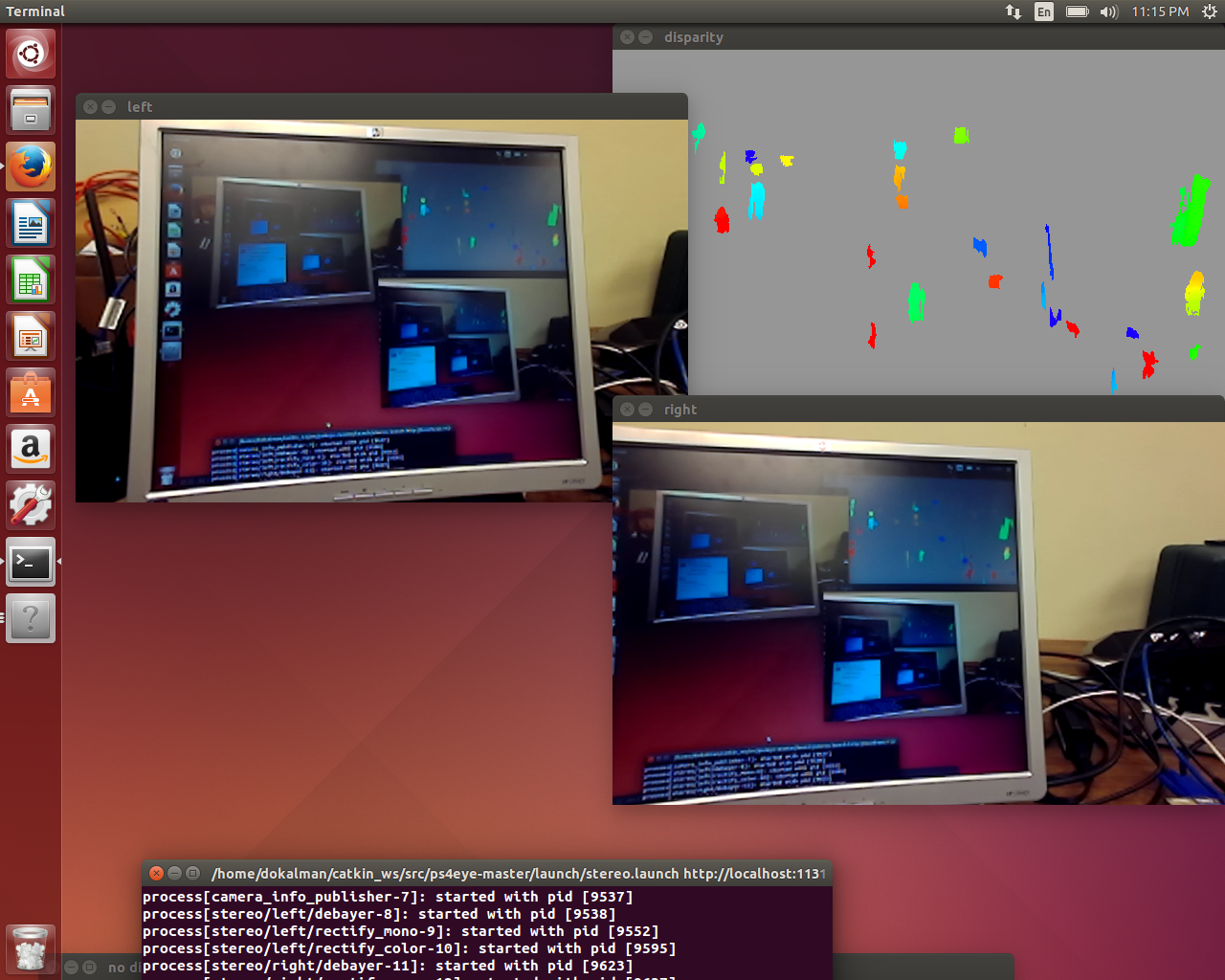
| 2015-05-30 15:06:29 -0500 | asked a question | ROS stereo disparity issues Im having issues getting a stereo disparity image to work with the PS4EYE this is what I am getting from the camera. the left and right cameras seem to be working, but disparity is way off. Even when I point it at a person. how do I fix this? I'm using the PS4EYE node from longjie. Screenshot from 2015-05-29 23_15_01.png EDIT: Looks like its in the parameters, but I have no idea what values I should change to make it look right. |
| 2015-03-01 13:45:37 -0500 | received badge | ● Good Question (source) |
| 2015-01-12 00:58:42 -0500 | received badge | ● Famous Question (source) |
| 2014-12-28 16:36:25 -0500 | received badge | ● Nice Question (source) |
| 2014-12-21 22:26:51 -0500 | received badge | ● Student (source) |
| 2014-11-21 11:50:56 -0500 | received badge | ● Notable Question (source) |
| 2014-11-07 02:55:00 -0500 | received badge | ● Popular Question (source) |
| 2014-11-06 13:28:39 -0500 | asked a question | how to use diff_drive_controller I have installed ros_control, ros_controllers, and diff_drive_controller under ROS indigo. however, I am having issues getting the diff_drive_controller node to rosrun. normally i can tab complete the node executable (e.g rosrun joy joy_node). however, diff drive does not allow autocomplete, and doesn't seem to have an executable. perhaps I have missed something that needs to be set up, but i've read the wiki page a few times and haven't found anything outstanding that would seem to break the install. |
| 2014-11-06 13:26:05 -0500 | commented answer | Building indigo on 14.10 Thank you!! |
| 2014-11-06 13:25:59 -0500 | commented answer | Building indigo on 14.10 Thank you!! I will keep that in mind. for right now, the actual robot computer is running 14.04, and I'm using a VM under windows with 14.04 and ROS. |
| 2014-11-06 13:25:22 -0500 | received badge | ● Famous Question (source) |
| 2014-10-30 19:27:50 -0500 | answered a question | Building indigo on 14.10 Is there any documentation on how to create a rosdep rule and setting that up. |
| 2014-10-30 18:40:55 -0500 | received badge | ● Notable Question (source) |
| 2014-10-28 14:33:44 -0500 | received badge | ● Popular Question (source) |
| 2014-10-27 20:23:00 -0500 | asked a question | Building indigo on 14.10 Is it possible to build indigo on Utopic. I have to run Utopic due to several issues that were solved in 14.10. I tried the build from source, but I get gazebo_ros: No definition of [gazebo] for OS version [utopic] |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}