The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2016-09-22 08:53:58 -0500 | received badge | ● Nice Question (source) |
| 2016-04-01 06:11:35 -0500 | received badge | ● Taxonomist |
| 2016-01-04 09:40:27 -0500 | received badge | ● Nice Question (source) |
| 2015-10-12 01:27:55 -0500 | received badge | ● Famous Question (source) |
| 2015-10-12 01:26:32 -0500 | commented answer | Pose going up and constant "Visual Odometry got Lost!" message Sorry Sai, I missed your comment, I did not manage to get good results in the end. I ended up working with a different monocular camera. |
| 2015-10-06 05:57:17 -0500 | marked best answer | Camera calibration parameters not appropriate for SVO package Hello, I have been trying to use the SVO package using Ubuntu 12.04 and ROS Hydro, but I ran into trouble with the calibration file. In the SVO calibration guidelines says that the camera_calibration package can be used to obtain a calibration file that works with SVO, but the format of the calibration file expected by the SVO looks like this:
And the one obtained with the camera_calibration, after convertir to yaml using the camera_calibration_parsers looks like this:
I do not see how to make SVO work with the calibration file I'm getting and I have also not found a way to convert said file to the format that works. I found another forum question where a person with my same problem got to the conclusion that the camera_calibration file didn't work with SVO and that the ATAN format file from ethzasl_ptam had to be used instead. But when I try to implement the ptam package I get a missing header error that I haven't been able to solve either (it's this error, but the solutions found in that thread haven't worked for me neither in Hydro nor in Groovy). Which is why I need to make the camera_calibration file work. Thank you very much in advance for any ideas or suggestions. |
| 2015-07-22 06:47:55 -0500 | commented answer | Fovis_ros using freenect_launch has depth image format error I looked a bit more into it. With a fresh install of both Fovis and the freenect_launch in Indigo (14.04.2) the Kinect works well, using the same launch file but with the respective <include file="$(find freenect_launch)/launch/freenect.launch"> |
| 2015-07-22 05:57:04 -0500 | commented answer | Fovis_ros using freenect_launch has depth image format error Sorry I could not answer before, I read about some problems with the openni_launch and the Kinect in Indigo, but in Hydro it works just fine with the simple launch file. I am glad you could make it work. |
| 2015-07-20 10:43:32 -0500 | received badge | ● Famous Question (source) |
| 2015-07-14 06:13:26 -0500 | received badge | ● Teacher (source) |
| 2015-07-14 04:50:20 -0500 | commented answer | Fovis_ros using freenect_launch has depth image format error Too bad about openni, are you by any chance working from a virtual machine? I had a similar issue with one. I haven't used freenect, but if it publishes the required image and depth topics you might be able to use them by just changing the remaps and the upper include from the working launch file |
| 2015-07-13 08:51:55 -0500 | answered a question | Fovis_ros using freenect_launch has depth image format error Hello, I was indeed having your same problem and it was because of the launch file I was using, which was this one. I still don't know why it didn't work, but adding the oppeni_launch include to the example launch file that Miguel Massot linked above fixed my problem, I don't think it should be any different in your case because you use Indigo. My current, working, launch file is this one: Hope it helps. |
| 2015-07-09 07:43:04 -0500 | received badge | ● Notable Question (source) |
| 2015-07-07 16:11:28 -0500 | received badge | ● Famous Question (source) |
| 2015-06-17 12:22:29 -0500 | received badge | ● Famous Question (source) |
| 2015-05-28 08:46:02 -0500 | commented answer | Turtlebot not moving according to input (in simulation and reality) And thank you for pointing out the control flaw, I will rethink how I'm using the tf measurements to account for deceleration. |
| 2015-05-28 08:44:11 -0500 | commented answer | Turtlebot not moving according to input (in simulation and reality) I am plotting the output of the /odom topic (that is published when I run the turtlebot_gazebo for the simulation and minimal.launch for the real robot), I thought that topic was giving me the combined odometry of IMU and wheels. |
| 2015-05-28 08:33:44 -0500 | commented answer | Turtlebot not moving according to input (in simulation and reality) robot_pose_ekf is being called on the turtlebot_bringup/package.xml as run_depend, but the odom_combined->base_footprint frame is not being published, the only one that appears is odom->base_footprint. I assumed that the odom-base_footprint was coming from the ekf since I don't have other odometry |
| 2015-05-28 03:21:24 -0500 | received badge | ● Notable Question (source) |
| 2015-05-27 16:37:09 -0500 | received badge | ● Popular Question (source) |
| 2015-05-27 11:30:14 -0500 | commented answer | Turtlebot not moving according to input (in simulation and reality) Sorry, I didn't read the last comment before. I thought the turtlebot's own odometry might be good enough since there are examples of people using the odom tf sucessfully to move in predefined trajectories, so maybe there's something wrong with my hardware instead of my code? |
| 2015-05-27 11:23:16 -0500 | commented answer | Turtlebot not moving according to input (in simulation and reality) and I tought the the cumulative error from the velocity would affect the real turtlebot but not the simulation. I did expect an improvement when using the tf because I don't depend on time or on the acurracy of the speed anymore and the odometry seems to work better than what the tf code shows |
| 2015-05-27 11:17:34 -0500 | commented answer | Turtlebot not moving according to input (in simulation and reality) Since I can compare the trajectory without odometry, with imu+wheel odometry and with the VOs. I thought the clock and loop errors wouldn't affect that much, since they didn't affect the turtlesim but maybe it got worse on gazebo because it is much heavier, |
| 2015-05-27 11:12:33 -0500 | commented answer | Turtlebot not moving according to input (in simulation and reality) Hello, thank you very much for the answer. My main goal is to test how the libfovis and viso2 visual odometry packages respond to different lightning conditions and environments, but for that I wanted a repeatable test so I thought the turtlebot was the best choice |
| 2015-05-27 10:08:14 -0500 | asked a question | Turtlebot not moving according to input (in simulation and reality) Hello, I'm using a Turtlebot with Kobuki base and running Ros Hydro on Ubuntu 12.04. I need the Turtlebot to move in the shape of a square and guiding myself by this codes: albany , turtlebot motion and turtlebot tutorials, I put together a code that only sends the appropriate cmd_vel messages to make the robot move at a certain speed for a chosen time and another one that uses tf information from odom->base_footprint to make the robot move a chosen distance at a certain speed. I was first testing the codes on turtlesim and they seemed to work well, but when I tested them on the gazebo turtlebot simulator and on the real turtlebot this was the outcome (obtained from the /odom topic on rviz): Gazebo Simulation - From the code that doesn't use tf:
Gazebo Simulation - From the code that uses the odom->base_footprint tf:
Real Turtlebot - From the code that doesn't use tf:
Real Turtlebot - From the code that uses the odom->base_footprint tf:
From what I've read the odom->base_footprint tf uses the wheel odometry and IMU data and the kobuki base already comes with a calibrated gyro, so I don't think the problem is in the odometry tf. Also, the movement of the turtlebot with the code that doesn't use the tf looks similar to the one the /odom topic shows. The result from the real turtlebot is terrible, but I was surprised that even in the simulation the code doesn't work well. I don't really know how to improve this results, because I expected that the way to improve the first code was to use the one that implements the tf and that one is the one that works the worst. Am I misusing the tfs or am I missing something particular about the turtlebot with the messages I'm sending? at least in the first code it looks as if the robot doesn't move as much as the speed would indicate but the tf should be indifferent to that. I read the similar questions in the FAQs but none of them help me solve this. Thank you very much in advance and sorry for the rviz plots, I didn't find another way to get the trajectory of the robot. The two codes are below: Code that only sends the appropriate cmd_vel messages to make the robot move at a certain speed for a chosen time: |
| 2015-05-27 05:19:34 -0500 | commented answer | Trouble building fovis_ros on Hydro I think when I was doing git clone it was downloading the indigo versions (I am really new with github) and that's why it wasn't working. I hope it helps |
| 2015-05-27 05:18:54 -0500 | commented answer | Trouble building fovis_ros on Hydro Hello Sai, I don't know if it will help you but this is exactly what worked for me in the end: I deleted what I had from fovis, then I downloaded (manually, not by git clone) the two folders (libfovis and fovis) from the hydro branch in github to the catkin/src/ folder and then it compiled well. |
| 2015-05-26 23:41:41 -0500 | received badge | ● Famous Question (source) |
| 2015-05-26 23:37:20 -0500 | marked best answer | Trouble building fovis_ros on Hydro Hello, I'm running Ubuntu 12.04 with ROS Hydro and wanted to test fovis_ros with a Kinect, but I'm having trouble building the package. Following the advice given in this question I executed the following commands :
So I had the fovis and libfovis folders inside catkin_ws/src. Then I tried building with catkin_make and got the following messages at the end:
I verified and the "visual_odometry.hpp" file is inside the libfovis/libfovis folder, like the rest of the files used by fovis_ros that don't seem to present an issue. I tried building the libfovis library first, which gave no trouble and then adding fovis_ros but I got the exact same error. I also followed the advice from issue #11 but the problem remained. Here is the complete log in case it's more useful. Thank you in advance. |
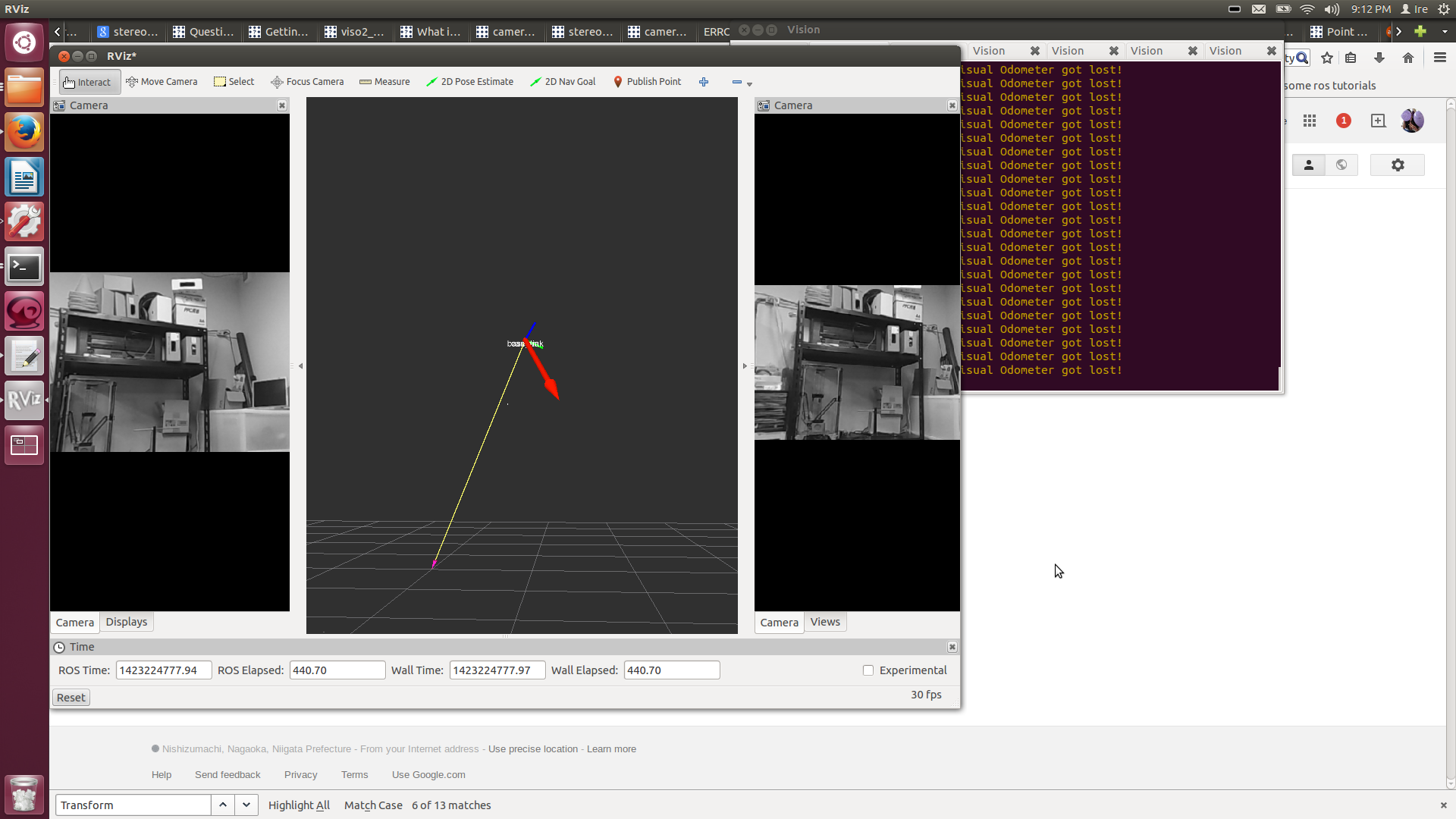
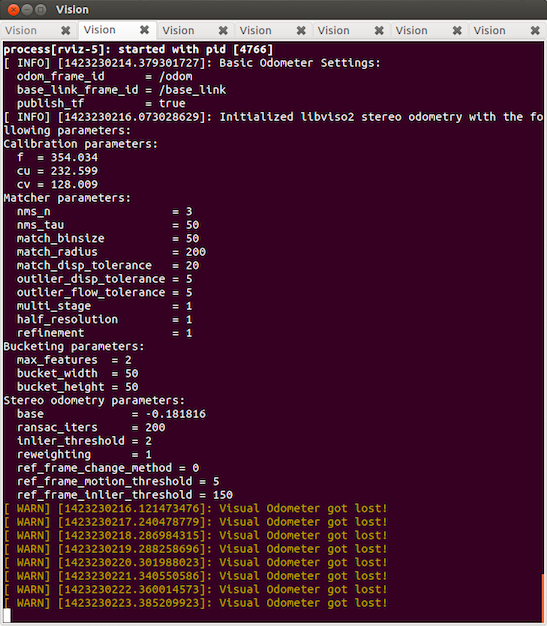
| 2015-05-25 14:38:24 -0500 | marked best answer | Pose going up and constant "Visual Odometry got Lost!" message Hello, I'm using the viso2_ros' stereo node with Ubuntu 12.04 and ROS Hydro. My setup consists of two webcams attached to a steady surface at a distance of 17.3 cm from each other and calibrated with the stereo camera_calibration. I am viewing in Rviz the Pose and Point_cloud published by the node and after a few seconds of running, the Pose starts shooting up:
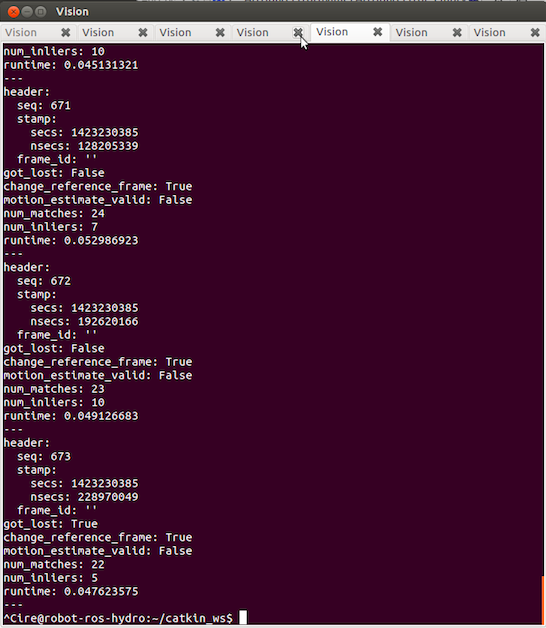
I also get a the "Visual Odometry got Lost!" message frequently. I checked the ~info topic and this was the outcome:
I read the FAQs for the package and I tried to apply the solutions given to people with similar issues. So I reset the odometer by calling the stereo_odometer/reset_pose service and changed the match_disp_tolerance parameter. Reseting the odometer didn't work because the pose went back down to the grid but after a few seconds it was going up again. I increased the match_disp_tolerance parameter from 5 (the value that it had by default) to 20 and then to 100. For some reason the number of "Visual Odometry got Lost!" messages increased with the parameter, and I think it worked the best with the original value.
I thought the problem might be that the number of inliers was too low, but even if i changed the background drastically the number of inliers didn't remain high for long (sometimes I get a lot of inliers but after a few seconds, without moving the camera, they decrease to less than 10, then they go up again and so on). This is the image I was viewing for the messages on some of the screenshots above:
And this is the launch file I'm using: Since I was getting the "Visual Odometry got Lost!" message constantly, I decided to test the odometry of the stereo camera without the robot, that's why I publish the tf with arguments 0 0 0 0 0 0 1 base_link camera 100. I still have some trouble grasping the tfs so I didn't want to add any mistake with them to my current problem. I'm not sure if I'm doing something wrong or if my cameras are not good enough to use the package ... (more) |
| 2015-05-19 12:50:46 -0500 | received badge | ● Notable Question (source) |
| 2015-05-19 12:50:46 -0500 | received badge | ● Popular Question (source) |
| 2015-05-16 09:27:01 -0500 | marked best answer | Building cob_people_detection package on Hydro Hello, I'm currently running Ros Hydro on Ubuntu 12.04 and I want to use a Kinect for face recognition. I found the cob_people_detection package and downloaded cob_people_perception-hydro_dev to my catkin_ws/src/ folder, but when I try to build it with catkin_make I get errors concerning several configuration files, like this ones: CMake Error at /opt/ros/hydro/share/catkin/cmake/catkinConfig.cmake:75 (find_package): Could not find a configuration file for package cob_image_flip. CMake Error at /opt/ros/hydro/share/catkin/cmake/catkinConfig.cmake:75 (find_package): Could not find a configuration file for package cob_perception_msgs. Here is the complete log. I tried deleting the devel and build folders, and then building, but I get the same error. I don't have a similar problem with any of the other packages I'm using, so I'm not sure if I'm missing something here. Thank you in advance, |
| 2015-05-16 09:26:58 -0500 | commented answer | Building cob_people_detection package on Hydro Thank you very much, with the first suggestion the compilation errors remained, but ignoring the packages you mentioned in the second one it compiled without errors. Thank you again. |
| 2015-05-15 08:41:54 -0500 | received badge | ● Notable Question (source) |
| 2015-05-11 07:39:04 -0500 | commented answer | Building cob_people_detection package on Hydro other packages to see if it made any difference (I once had an issue with two conflicting packages), but it didn't help. Today I downloaded the common and perception packages once more and compiled several times, but it's still the same error. I tried deleting the devel and build folders too (2/2) |
| 2015-05-11 07:36:58 -0500 | commented answer | Building cob_people_detection package on Hydro Hello, sorry but it is still trowing errors when I tried to build ( https://gist.github.com/Athria/c575b2... ), first I downloaded again both packages from github and tried with catkin_make and catkin_make -j1, since none of them worked and I couldn't fix the error I tried deleting (1/2) |
| 2015-05-08 04:40:27 -0500 | commented answer | Building cob_people_detection package on Hydro I also tried installing the indigo_dev like suggested, but it threw errors as well. I think I have all the dependencies for the openni2_tracker and I couldn't find anything about additional dependencies for the libnite2, but from the errors I think I might be missing something there. Thank you again |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.