
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-11-29 05:42:00 -0500 | received badge | ● Taxonomist |
| 2016-07-09 21:41:34 -0500 | received badge | ● Famous Question (source) |
| 2016-01-25 23:46:06 -0500 | received badge | ● Famous Question (source) |
| 2015-08-07 07:41:34 -0500 | commented question | obstacles are not removed from the costmap @David: I updated the screenshots |
| 2015-08-06 17:07:13 -0500 | received badge | ● Famous Question (source) |
| 2015-08-06 11:17:07 -0500 | received badge | ● Editor (source) |
| 2015-07-30 06:34:28 -0500 | received badge | ● Notable Question (source) |
| 2015-07-27 12:23:24 -0500 | received badge | ● Popular Question (source) |
| 2015-07-26 11:24:44 -0500 | commented question | obstacles are not removed from the costmap @David: Thanks for asking, I've updated the post. |
| 2015-07-25 17:49:01 -0500 | asked a question | obstacles are not removed from the costmap Hi, I've searched and i found similar questions, but no conclusions. scenario: ROS: Indigo Laser: XV11 The robot is stable not moving, i move near the robot, and the map is updated with an obstacle, i move away, and the obstacle is not removed (unless the move_base is restarted), the laser is clear, the obstacle is still there plus some yellow dots. rviz snapshots: initial: https://dl.dropboxusercontent.com/u/1... obstacle present: https://dl.dropboxusercontent.com/u/1... obstacle gone: https://dl.dropboxusercontent.com/u/1... obstacle gone (laser only): https://dl.dropboxusercontent.com/u/1... If i go again to the front of the robot the obstacle area get's bigger, and stays there even when i move away. Any clues ? Regards, Tiago Update1: (costmap parameters) |
| 2015-07-25 17:13:36 -0500 | received badge | ● Enthusiast |
| 2015-07-14 21:20:14 -0500 | received badge | ● Scholar (source) |
| 2015-07-13 07:18:20 -0500 | received badge | ● Notable Question (source) |
| 2015-07-12 10:41:23 -0500 | received badge | ● Popular Question (source) |
| 2015-07-11 18:21:43 -0500 | asked a question | teleop + Collision detection What is the most effective way to implement teleop (twist) with collision detection, basically how to query the costmap to determine if is clear of free to send the twist msg ? Cheers, Tiago |
| 2015-06-11 04:04:20 -0500 | received badge | ● Notable Question (source) |
| 2015-03-10 13:45:24 -0500 | received badge | ● Popular Question (source) |
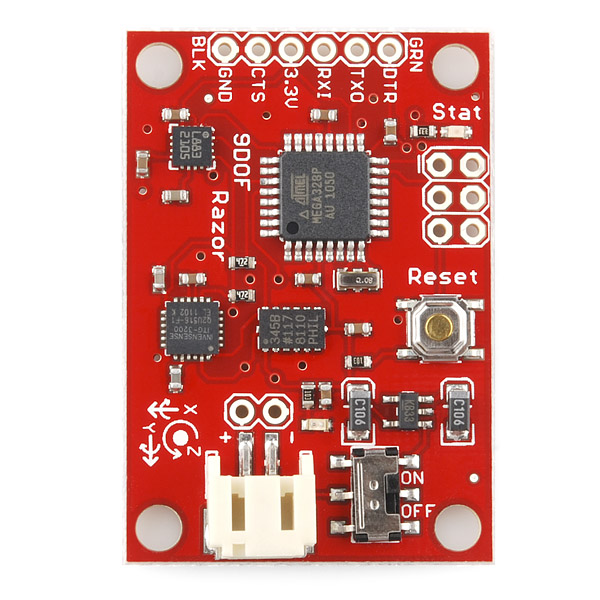
| 2015-03-09 14:51:04 -0500 | asked a question | razor_imu_9dof stick orientation The stick version the G/M/A axes are not aligned and are inverted (bottom board) https://cdn.sparkfun.com/assets/parts... versus the board: https://cdn.sparkfun.com/assets/parts... Firmware axes adjustments (sensors.ino) For all the boards: A=> x = y; y=x; z=z; G=> x = -y; y =-x; z = -z; For the 10724: M=> x = x; y = -y; z=-z; 1) What should be the stick alignment ? if both boards are aligned horizontal text: Board: x (down) / y (right) / z (counterclockwise) stick: invert horizontal axes(bottom print) we have: G=> x (up) / y(left) / z (counterclockwise) A=> y (left) / x(down) M=> x(left) / y(down) and looking to the firmware the only existent adjustment (HW__VERSION_CODE == 10724) is done over the magnet readings, but the Gyro and Accel are not aligned, shouldn't the firmware adjust those two ? Regards, Tiago |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}