The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-08-02 15:05:44 -0500 | received badge | ● Famous Question (source) |
| 2016-06-27 12:47:19 -0500 | received badge | ● Notable Question (source) |
| 2016-06-11 02:38:01 -0500 | commented answer | How do I access files in same directory as executable? (Python Catkin) Took your advice, installed my API scripts in |
| 2016-06-09 08:05:10 -0500 | received badge | ● Self-Learner (source) |
| 2016-06-09 08:05:10 -0500 | received badge | ● Teacher (source) |
| 2016-06-06 14:35:53 -0500 | received badge | ● Popular Question (source) |
| 2016-06-06 13:16:29 -0500 | commented answer | How do I access files in same directory as executable? (Python Catkin) This works! Thanks a lot, didn't know this trick till now. |
| 2016-06-05 13:21:05 -0500 | asked a question | How do I access files in same directory as executable? (Python Catkin) I have a python catkin package in which I am trying to run some shell files kept in the same |
| 2015-05-29 13:52:17 -0500 | received badge | ● Famous Question (source) |
| 2015-03-30 03:32:50 -0500 | received badge | ● Notable Question (source) |
| 2015-03-25 16:47:36 -0500 | answered a question | How to use laser_scan_matcher with depthimage_to_laserscan and gmapping? Okay, got it working. There was an issue with the |
| 2015-03-25 14:22:03 -0500 | received badge | ● Popular Question (source) |
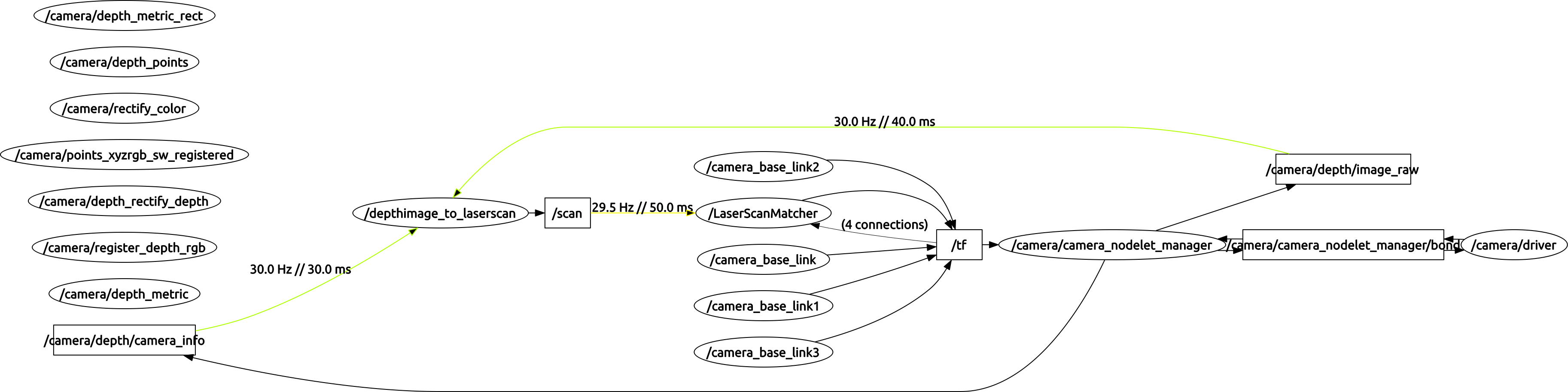
| 2015-03-25 04:02:49 -0500 | asked a question | How to use laser_scan_matcher with depthimage_to_laserscan and gmapping? I am kinda new to ROS here, so please help me out accordingly. EDIT: Here is what I'm doing so far 1. roscore
2. roslaunch openni2_launch openni2.launch
3. rosrun depthimage_to_laserscan depthimage_to_laserscan image:=/camera/depth/image_raw
4. rosrun laser_scan_matcher laser_scan_matcher_node Here is the error I get from
Here is my |
| 2014-10-25 20:23:25 -0500 | received badge | ● Student (source) |
| 2014-10-13 18:09:29 -0500 | received badge | ● Famous Question (source) |
| 2014-09-26 01:20:39 -0500 | received badge | ● Enthusiast |
| 2014-09-24 02:15:24 -0500 | received badge | ● Notable Question (source) |
| 2014-09-23 13:08:12 -0500 | commented question | rosserial_python Failed Packet Flags + Lost Sync With Device, Restarting Yeah, I agree with that @paulbovbel. But people have gotten the "Hello World" working on Groovy. Even that isn't working for me. |
| 2014-09-23 12:56:02 -0500 | received badge | ● Popular Question (source) |
| 2014-09-23 12:47:52 -0500 | commented answer | rosserial Device Lost Sync, restarting |
| 2014-09-23 03:49:09 -0500 | commented answer | Problem setting up rosserial_arduino |
| 2014-09-23 02:48:31 -0500 | commented question | rosserial_python Failed Packet Flags + Lost Sync With Device, Restarting @ahendrix, please help me out here. |
| 2014-09-22 03:57:30 -0500 | received badge | ● Editor (source) |
| 2014-09-22 03:56:19 -0500 | received badge | ● Famous Question (source) |
| 2014-09-22 03:56:07 -0500 | commented answer | rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0 on RasPi giving "could not open port /dev/ttyUSB0" error |
| 2014-09-22 03:11:36 -0500 | received badge | ● Supporter (source) |
| 2014-09-22 03:11:32 -0500 | received badge | ● Scholar (source) |
| 2014-09-22 03:11:30 -0500 | commented answer | rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0 on RasPi giving "could not open port /dev/ttyUSB0" error Yeah, I checked that. It's all groovy. |
| 2014-09-22 03:06:17 -0500 | asked a question | rosserial_python Failed Packet Flags + Lost Sync With Device, Restarting I am using ROS Groovy on my RasPi and the Arduino Leonardo and the Arduino Mega 2560.
I checked out the solution given here and here but none of that worked. It seems to be a memory problem, but I can't figure out exactly where to begin solving this problem. |
| 2014-09-22 02:14:48 -0500 | commented answer | rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0 on RasPi giving "could not open port /dev/ttyUSB0" error You deserve a cookie. That worked.
But it gives an error of |
| 2014-09-22 01:13:06 -0500 | received badge | ● Notable Question (source) |
| 2014-09-21 23:30:48 -0500 | received badge | ● Popular Question (source) |
| 2014-09-21 15:25:45 -0500 | edited question | rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0 on RasPi giving "could not open port /dev/ttyUSB0" error I have installed Now, the issue here is that when I try step 2 using
For some reason, it keeps taking Thanks to ahendrix for having found out the problem. But there is a follow up issue here. Please check. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.