
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-06-18 14:25:46 -0500 | received badge | ● Famous Question (source) |
| 2021-03-24 08:00:40 -0500 | received badge | ● Famous Question (source) |
| 2021-01-19 07:02:19 -0500 | received badge | ● Notable Question (source) |
| 2021-01-19 07:02:19 -0500 | received badge | ● Famous Question (source) |
| 2020-10-22 10:30:11 -0500 | received badge | ● Popular Question (source) |
| 2020-10-01 08:24:29 -0500 | edited question | Alternatives to PyKDL? Alternatives to PyKDL? Hello everyone! I am currently using python 3.6.9 and ROS Melodic. I have tried a lot to instal |
| 2020-10-01 08:23:56 -0500 | edited question | Alternatives to PyKDL? Alternatives to PyKDL? Hello everyone! I am currently using python 3.6.9 and ROS Melodic. I have tried a lot to instal |
| 2020-10-01 07:30:20 -0500 | edited question | Alternatives to PyKDL? Alternatives to PyKDL? Hello everyone! I am currently using python 3.6.9 and ROS Melodic. I have tried a lot to instal |
| 2020-10-01 07:29:29 -0500 | asked a question | Alternatives to PyKDL? Alternatives to PyKDL? Hello everyone! I am currently using python 3.6.9 and ROS Melodic. I have tried a lot to instal |
| 2020-09-24 05:21:02 -0500 | received badge | ● Notable Question (source) |
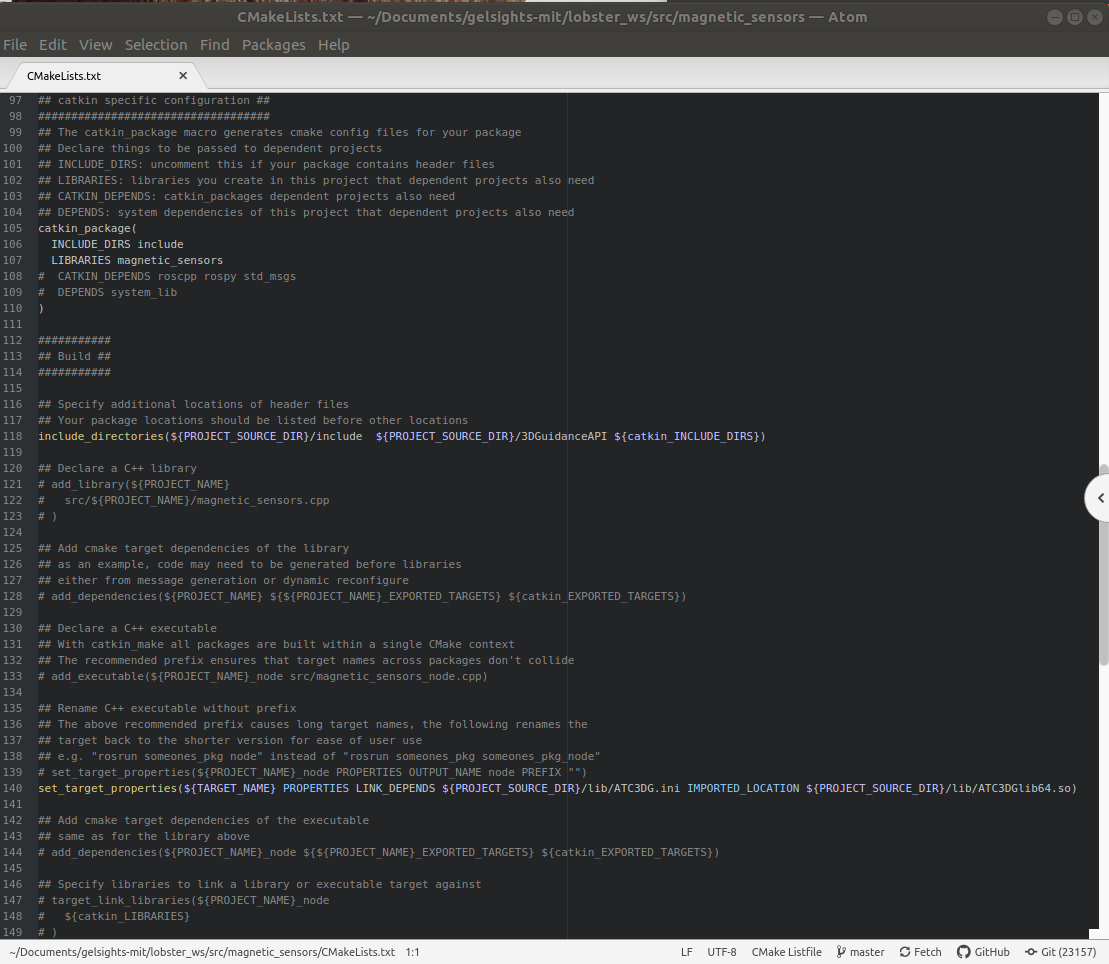
| 2020-04-23 10:17:04 -0500 | marked best answer | Cannot link libraries to CMakeLists.txt I have seen some similar questions on this forum but none of them worked for me so I am going to ask it here. So I have a custom package that generates a library file (ATC3DGlib64.so) during compilation and stores it in Below are the actual two command that are executed from the makefile when I run and I want to put all these commands in a CMakeLists.txt Essentially there is one .cpp file that needs to compiled and linked to the library file that is in the I have tried to link the ATC3DGlib64.so file to my executable in the CMakeLists.txt in many ways but none of them have worked for me. I keep getting this error when I run From what I read online it seems these kind of errors generate when the path is wrong and/or name is wrong and/or the library is not installed. I doubt any of these are true in my case. I have also tried to create a symbolic link between the original library file that is in For If anyone knows whats going on or has suggestions on what to try then please reply. Thanks for reading! Some useful links that have unfortunately not worked for me but might be useful to others.
I will add some more relevant links here soon... UPDATE: THIS LINK solved my problem. I am able to build the package now. |
| 2020-04-23 10:16:41 -0500 | received badge | ● Rapid Responder (source) |
| 2020-04-23 10:16:41 -0500 | answered a question | Cannot link libraries to CMakeLists.txt THIS LINK solved my problem. I am able to build the package now. |
| 2020-04-23 10:15:16 -0500 | received badge | ● Popular Question (source) |
| 2020-04-23 08:27:29 -0500 | edited question | Cannot link libraries to CMakeLists.txt Cannot link libraries to CMakeLists.txt I have seen some similar questions on this forum but none of them worked for me |
| 2020-04-23 08:26:09 -0500 | commented question | Cannot link libraries to CMakeLists.txt This link solved my problem. I am able to build the package now. |
| 2020-04-23 06:32:49 -0500 | commented question | Cannot link libraries to CMakeLists.txt Could be, could be not. I am not sure at the moment. |
| 2020-04-23 06:32:13 -0500 | edited question | Cannot link libraries to CMakeLists.txt Cannot link libraries to CMakeLists.txt I have seen some similar questions on this forum but none of them worked for me |
| 2020-04-23 06:24:47 -0500 | edited question | Cannot link libraries to CMakeLists.txt Cannot link libraries to CMakeLists.txt I have seen some similar questions on this forum but none of them worked for me |
| 2020-04-23 06:23:21 -0500 | edited question | Cannot link libraries to CMakeLists.txt Cannot link libraries to CMakeLists.txt I have seen some similar questions on this forum but none of them worked for me |
| 2020-04-23 06:09:26 -0500 | edited question | Cannot link libraries to CMakeLists.txt Cannot link libraries to CMakeLists.txt ROS Melodic I have seen some similar questions on this forum but none of them wo |
| 2020-04-22 20:28:29 -0500 | asked a question | Cannot link libraries to CMakeLists.txt Cannot link libraries to CMakeLists.txt ROS Melodic I have seen some similar questions on this forum but none of them wo |
| 2019-11-05 18:13:02 -0500 | received badge | ● Famous Question (source) |
| 2018-07-25 14:04:12 -0500 | marked best answer | Invalid roslaunch XML syntax: not well-formed I am trying to launch several launch files from a main launch file. I can successfully call one of the launch files from my main launch file. Like this. http://answers.ros.org/question/42814... But I fail at calling the other two. The launch file that I can successfully call runs just a single node. No arguments. But the other two launch files that I fail calling have a bunch of arguments which I feel should be passed inside of the "include" tag? One of them is the launch file for the Kinova Jaco arm and the other one is a launch file that has all the perception functionalities in it. I am new to xml files and need help with this. |
| 2017-10-06 01:22:42 -0500 | received badge | ● Notable Question (source) |
| 2017-03-20 20:45:31 -0500 | received badge | ● Famous Question (source) |
| 2017-02-24 07:38:36 -0500 | marked best answer | How to use image_proc node Using Xtion on Ubuntu with ROS hydro. Ran openni2_launch to the launch camera drivers.
/camera/rgb/image_raw /camera/rgb/camera_info and many other topics /camera/depth/.. camera/ir/..
tells me to advertise /camera/image_raw first. I was assuming my camera drivers are publishing to /camera/image_raw and camera/camera_info by default which I suppose image_proc will subscribe to publish image_mono or image_rect image but apparently they are publishing /camera/rgb/image_raw and camera/rgb/camera_info. What is the difference between /camera/image_raw and /camera/rgb/image_raw and how should I publish /camera/image_raw. |
| 2017-02-20 13:07:10 -0500 | received badge | ● Famous Question (source) |
| 2017-02-15 20:42:13 -0500 | marked best answer | Baxter Moveit tutorial example error Using Ubuntu 14.04 with ROS Indigo installed. Trying to implement Moveit example for baxter. I updated the baxter to the new sdk. Version 1.2. Runnig
gives me this error ... logging to /home/colab/.ros/log/3c0648a4-bdfe-11e5-aedd-000af70eb5a9/roslaunch-ros-monster-10040.log Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. while processing /home/colab/ros/ws_baxter_sdk/src/moveit_robots/baxter/baxter_moveit_config/launch/planning_context.launch: Invalid tag: Cannot load command parameter [robot_description_semantic]: command [/opt/ros/indigo/share/xacro/xacro.py --inorder /home/colab/ros/ws_baxter_sdk/src/moveit_robots/baxter/baxter_moveit_config/config/baxter.srdf.xacro left_electric_gripper:=true right_electric_gripper:=true left_tip_name:=left_gripper right_tip_name:=right_gripper] returned with code [2]. Param xml is The traceback for the exception was written to the log file Cannot understand the error. Please assist. Thank you |
| 2016-12-22 12:19:47 -0500 | commented answer | Moveit! integration with Jaco arm ISSUE rosparam list | grep moveit_controller_manager gives me /moveit_controller_manager as the output. Nothing else. Not sure if this is what we want!? |
| 2016-12-22 09:43:46 -0500 | received badge | ● Associate Editor (source) |
| 2016-12-22 06:01:48 -0500 | received badge | ● Notable Question (source) |
| 2016-12-21 11:36:10 -0500 | commented question | Moveit! integration with Jaco arm ISSUE Thank you for responding to my question. I have edited my question and added the errors and warnings that I am getting. Can you please guide me now? |
| 2016-12-21 10:02:06 -0500 | received badge | ● Popular Question (source) |
| 2016-12-20 18:45:39 -0500 | asked a question | Moveit! integration with Jaco arm ISSUE Hi all, I have been trying to integrate Moveit! with a real arm (Jaco2 from Kinova) for almost a MONTH now! and I haven't made any progress since I finished the tutorials. I can get everything (planning, obstacle avoidance etc.) working in simulation from the tutorials but I haven't really figured out how to get it working with a real arm. For now my aim is to get the real robot in rviz, plan a path using Moveit! and execute it via the real arm. I can get bits and pieces of information from the internet scattered everywhere but the whole picture is still not clear. Also because I think I do not know ROS super well. This is what I have been doing as per my understanding.
After finishing all the tutorials and creating the jaco_moveit_config folder from the Moveit! setup assistant I launch the real robot, I then create the jaco_controllers.yaml file and moveit_planning_execution.launch file as mentioned here. I also create a jaco_moveit_simple_controller_manager.launch file as mentioned here. After that I
and following warnings
After which when I try
Is the sequence of launching things wrong? My belief is that these three things are sufficient to see the real arm in rviz in real time and plan and execute some motions. Also note I would not need any action servers at this point as I am not executing any trajectories on the real arm. (correct me here if I am wrong) The issue I think might be is that the joint names in the urdf that I have and the names in the rosparam server does not match. That's why I get stuck in errors and warnings all the time regarding the mismatch in joint names. Can anyone please go through my files and point out the mistakes I am making? I am happy to share my files on git. Feel free to check them out. Also if you need to look at some ... (more) |
| 2016-09-16 08:24:46 -0500 | received badge | ● Popular Question (source) |
| 2016-09-13 16:55:36 -0500 | commented answer | Invalid roslaunch XML syntax: not well-formed And the error message is always the same. Same as in the question topic. I do not get line number or file name. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}