The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-06-27 00:00:16 -0500 | received badge | ● Famous Question (source) |
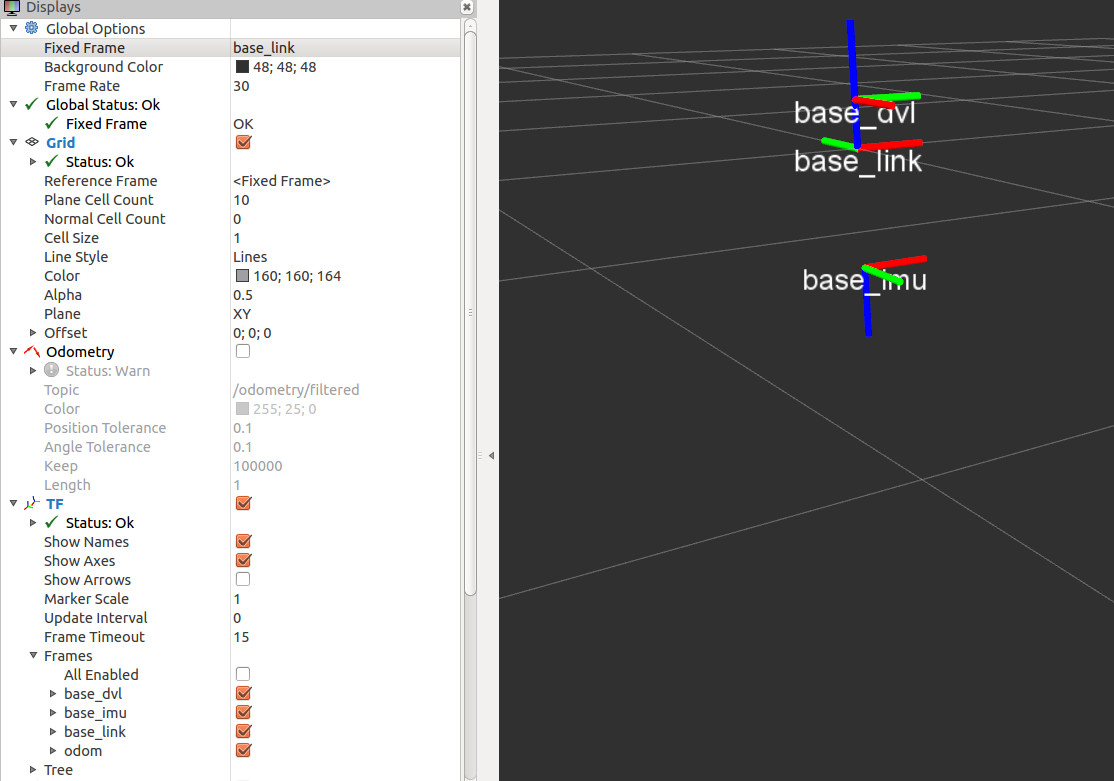
| 2019-05-20 02:08:22 -0500 | marked best answer | robot_localization not generating odom to robot's sensor_frame transform Hello all, I'm trying to fuse an IMU and a DVL (measures linear velocity on x, y, z). I have the following axis configurations.
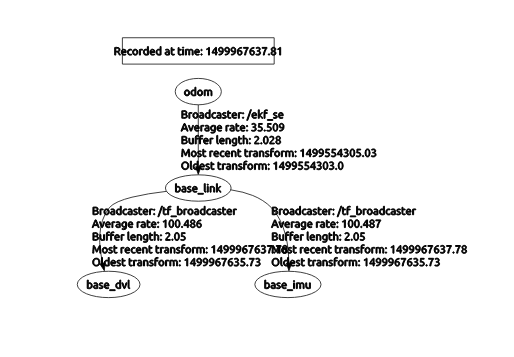
I have a transform broadcaster which broadcasts base_imu->base_link and base_dvl->base_link. The picture attached shows the frame poses. I have set the fixed frame as base_link here (rviz). This is the TF tree:
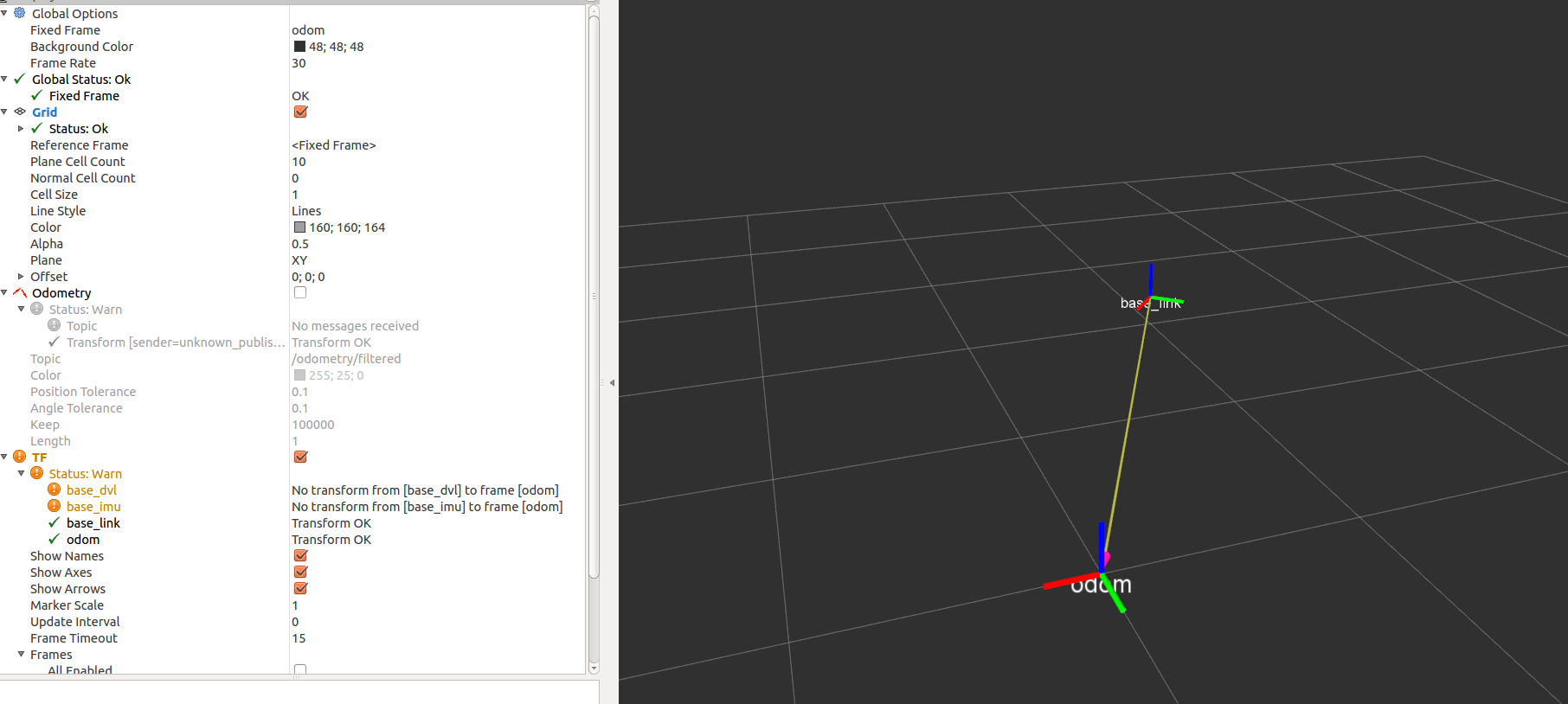
But when I run robot_localization, the localization is perfect but it doesn't show my sensor frames. There are also some warnings generated in rviz (check left pane), saying there isn't any transform to odom frame. But there is a transform as per the tf_tree. Here is a picture:
How do I fix this issue? |
| 2018-10-23 20:02:49 -0500 | received badge | ● Famous Question (source) |
| 2018-03-04 15:13:11 -0500 | received badge | ● Famous Question (source) |
| 2017-09-28 05:12:04 -0500 | received badge | ● Notable Question (source) |
| 2017-07-18 13:00:02 -0500 | commented question | robot_localization not generating odom to robot's sensor_frame transform Hi, Thanks for your reply. The timings don't matter to me much since they are just static transforms. But can that be c |
| 2017-07-17 16:33:25 -0500 | received badge | ● Popular Question (source) |
| 2017-07-15 14:23:12 -0500 | commented answer | About using imu_tools filters @martin-guenther Thanks a lot. |
| 2017-07-15 14:22:39 -0500 | commented answer | About using imu_tools filters @martin-guenther Thanks a lot. |
| 2017-07-14 20:50:28 -0500 | asked a question | robot_localization not generating odom to robot's sensor_frame transform robot_localization not generating odom to robot's sensor_frame transform Hello all, I'm trying to fuse an IMU and a DVL |
| 2017-07-11 13:14:56 -0500 | commented answer | About using imu_tools filters @Martin Günther Is there a launch file or a yaml file where you edit the parameters? I couldn't find one. Or should I di |
| 2017-07-11 13:05:53 -0500 | commented answer | About using imu_tools filters @martin Guenther Is there a launch file or a yaml file where you edit the parameters? I couldn't find one. Or should I d |
| 2017-07-11 13:05:21 -0500 | commented answer | About using imu_tools filters @martin Gunther Is there a launch file or a yaml file where you edit the parameters? I couldn't find one. Or should I di |
| 2017-07-06 17:19:28 -0500 | commented answer | Can robot_localization fuse raw gyro/accel data with odometry ? Thanks a lot, @tom moore |
| 2017-07-06 05:13:32 -0500 | received badge | ● Popular Question (source) |
| 2017-07-06 05:13:32 -0500 | received badge | ● Notable Question (source) |
| 2017-07-05 17:17:11 -0500 | commented answer | Can robot_localization fuse raw gyro/accel data with odometry ? @gvdhoorn I understand. I didn't mean to offend anyone here. I re-commented in the off chance he missed to see it. Also |
| 2017-07-05 17:16:53 -0500 | commented answer | Can robot_localization fuse raw gyro/accel data with odometry ? @gvdhoom I understand. I didn't mean to offend anyone here. I re-commented in the off chance he missed to see it. Also t |
| 2017-07-05 13:53:50 -0500 | commented answer | Can robot_localization fuse raw gyro/accel data with odometry ? @tom moore Would really appreciate your reply on this |
| 2017-07-04 15:25:59 -0500 | commented answer | Can robot_localization fuse raw gyro/accel data with odometry ? @Tom Moore What if I want to use yaw measurements from the 'orientation'? What would the yaml file look like? Assume "or |
| 2017-07-04 15:23:59 -0500 | commented answer | Can robot_localization fuse raw gyro/accel data with odometry ? @Tom Moore What if I want to use yaw measurements from the 'orientation'? What would the yaml file look like? |
| 2017-04-27 07:40:05 -0500 | received badge | ● Notable Question (source) |
| 2017-04-16 01:43:36 -0500 | received badge | ● Popular Question (source) |
| 2017-04-15 15:19:35 -0500 | asked a question | Indoor mobile robot navigation I'm trying to realize indoor navigation for a car. I have a monocular camera and an IMU. Some ideas I'm exploring:
Q1. Are there ROS packages for 1,2,3 ? Q2. What other ideas should I explore? |
| 2017-03-30 15:54:44 -0500 | commented answer | How to return an array from my subscriber function Why exactly did you use a threading event object? |
| 2017-03-24 10:33:30 -0500 | asked a question | Ros nodes not starting from a launch file 'm trying to create a launch file for starting all the nodes. But for some reason, running the launch file doesn't run the node. The topic in which the node publishes is listed when I run rostopic list, but when I try to echo, nothing is displayed. On the other hand if I just do a rosrun, it all works perfectly fine. This is my launch file: I'm using Indigo. I'm trying to launch a python node in a folder called scripts within the IMU_filter ROS package. |
| 2016-02-25 05:26:42 -0500 | received badge | ● Enthusiast |
| 2015-06-11 14:26:08 -0500 | received badge | ● Famous Question (source) |
| 2015-03-15 11:36:34 -0500 | received badge | ● Famous Question (source) |
| 2014-09-10 00:57:48 -0500 | commented answer | Fatal error while trying to build map from logged data. (hector SLAM) Ah. yes. It worked. I wish they told that in the wiki, that desired topics, pointcloud,map or path etc should be selected from the panel. |
| 2014-09-10 00:47:18 -0500 | received badge | ● Notable Question (source) |
| 2014-09-08 00:20:57 -0500 | received badge | ● Popular Question (source) |
| 2014-09-07 16:03:50 -0500 | received badge | ● Notable Question (source) |
| 2014-09-07 16:01:54 -0500 | commented answer | Fatal error while trying to build map from logged data. (hector SLAM) Hey, the .bag file opened but there wasn't any real time map generation in RVIZ. My impression was based on the point cloud data, RVIZ will generate a map, but nothing happened. Am I missing something? |
| 2014-09-07 15:08:31 -0500 | commented question | Fatal error while trying to build map from logged data. (hector SLAM) @bvbdort edited. |
| 2014-09-07 13:48:34 -0500 | asked a question | Fatal error while trying to build map from logged data. (hector SLAM) I've been following this tutorial, http://wiki.ros.org/hector_slam/Tutor... , but I never got past step 4. My OS version - Ubuntu 14.04 and I'm running ROS Indigo. I get the following error: [EDIT] But the file was successfully downloaded, Any thoughts as to why this is happening? |
| 2014-09-06 13:01:53 -0500 | received badge | ● Popular Question (source) |
| 2014-09-06 12:37:15 -0500 | commented answer | Error while compiling a program to publish a string in a custom topic. Hello, it worked. Can you tell me why we have it to do this way? I saw the same in the ROSwiki also. Thank you |
| 2014-09-06 12:37:15 -0500 | received badge | ● Commentator |
| 2014-09-06 08:18:48 -0500 | commented answer | Error while compiling a program to publish a string in a custom topic. I tried editing the xml file also, but still same error. |
| 2014-09-06 08:03:56 -0500 | commented answer | Error while compiling a program to publish a string in a custom topic. I have added those dependencies in CMakeLists.txt. Haven't edited the xml file though, can it result in compile errors? |
| 2014-09-06 08:01:35 -0500 | commented question | Error while compiling a program to publish a string in a custom topic. hello, edited. |
| 2014-09-06 08:00:19 -0500 | edited question | Error while compiling a program to publish a string in a custom topic. I'm trying to publish a string under the topic, name. But I'm getting compile error and I can't figure out where exactly the problem lies also. Could someone help me out. This is my pubname.cpp file. This is my CMakeLists.txt, Error: |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.