
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-08-06 04:44:52 -0500 | marked best answer | depthimage_to_laserscan works with rosrun but the DepthImageToLaserScanNodelet does not work properly Hi, I have trouble with a nodelet which is responsible for converting depth image to laser scan. I have the required topics namely /camera/depth/camera_info and /camera/depth/image_raw and here is how my launch file looks like: My problem is that the /scan topic is empty and is not being published. However when I do the /scan topic is being published as expected. Do you have any suggestions? Thanks a lot in advance. |
| 2020-08-06 04:44:52 -0500 | received badge | ● Nice Answer (source) |
| 2020-05-07 15:49:59 -0500 | received badge | ● Famous Question (source) |
| 2020-04-09 08:44:26 -0500 | received badge | ● Famous Question (source) |
| 2019-11-13 08:34:39 -0500 | received badge | ● Famous Question (source) |
| 2019-10-03 18:31:51 -0500 | received badge | ● Famous Question (source) |
| 2018-04-18 12:49:35 -0500 | received badge | ● Famous Question (source) |
| 2018-03-27 04:19:55 -0500 | received badge | ● Notable Question (source) |
| 2018-01-23 01:32:11 -0500 | marked best answer | Problem with openni2_camera, Primesense not detected. Hi, I am trying to access the rgdb information of a Primesense sensor. I have ros-hydro-openni2-* installed using sudo apt-get and it previously worked just fine with the following command: I used to be able to access the rgbd information and the topics using exactly the same command about a month ago. I dont know if there has been an update which has led to this. I have ubuntu 12.04 and ROS hydro installed. I get the same error whether the Primesense sensor is plugged in or not and lsusb doesnt detect this device.
I have tried setting the Any suggestions are welcome, thanks in advance! Update 20140903 So this is the output // now with the Primesense connected I tried another ... (more) |
| 2017-12-01 02:49:36 -0500 | received badge | ● Popular Question (source) |
| 2017-11-30 07:16:29 -0500 | edited question | importing rospy and actionlib causes embedding python code in c++ to fail importing rospy and actionlib causes embedding python code in c++ to fail Hi, I am using a large code base were our robo |
| 2017-11-29 13:38:09 -0500 | received badge | ● Famous Question (source) |
| 2017-11-29 13:14:07 -0500 | answered a question | What do you suggest as a robust person tracking ROS-based solution using the Kinect I have found that openpose and its wrappers seem very promising at the moment. |
| 2017-11-29 13:12:35 -0500 | asked a question | importing rospy and actionlib causes embedding python code in c++ to fail importing rospy and actionlib causes embedding python code in c++ to fail Hi, I am using a large code base were our robo |
| 2017-10-24 09:30:11 -0500 | commented question | Track human orientation? Hi, Have you found a good solution? |
| 2017-07-21 07:36:22 -0500 | commented question | move_base error I am not sure if this helps, but I found out that this happens when a new goal is sent. In my case, I was only intereste |
| 2017-07-21 07:32:41 -0500 | commented question | 'Path' object has no attribute 'currentPosition' Sure, but I thought there might be an element of ROS such as threads that could lead to this, since I could not think of |
| 2017-06-07 08:56:46 -0500 | received badge | ● Notable Question (source) |
| 2017-06-06 15:10:46 -0500 | received badge | ● Popular Question (source) |
| 2017-06-06 11:59:19 -0500 | edited question | 'Path' object has no attribute 'currentPosition' 'Path' object has no attribute 'currentPosition' I have a very strange case here. I have a python node that has a class |
| 2017-06-06 11:57:41 -0500 | edited question | 'Path' object has no attribute 'currentPosition' 'Path' object has no attribute 'currentPosition' I have a very strange case here. I have a python node that has a class |
| 2017-06-06 11:55:15 -0500 | edited question | 'Path' object has no attribute 'currentPosition' 'Path' object has no attribute 'currentPosition' I have a very strange case here. I have a python node that has a class |
| 2017-06-06 11:45:04 -0500 | commented question | 'Path' object has no attribute 'currentPosition' Please let me know what you would like to see more. |
| 2017-06-06 11:44:21 -0500 | commented question | 'Path' object has no attribute 'currentPosition' Thanks for your reply. Well, its not copying but rather creating a new object with similar fields for the variables of c |
| 2017-06-06 10:32:14 -0500 | asked a question | 'Path' object has no attribute 'currentPosition' 'Path' object has no attribute 'currentPosition' I have a very strange case here. I have a python node that has a class |
| 2017-06-06 10:32:12 -0500 | asked a question | 'Path' object has no attribute 'currentPosition' 'Path' object has no attribute 'currentPosition' I have a very strange case here. I have a python node that has a class |
| 2017-01-26 09:35:23 -0500 | received badge | ● Famous Question (source) |
| 2016-12-05 06:36:22 -0500 | commented answer | What do you suggest as a robust person tracking ROS-based solution using the Kinect I was wondering if there is already an off the shelf solution since many people are using the Kinect for this purpose nowadays. |
| 2016-12-02 09:12:44 -0500 | received badge | ● Notable Question (source) |
| 2016-12-02 02:13:05 -0500 | received badge | ● Popular Question (source) |
| 2016-12-01 08:37:24 -0500 | commented question | What do you suggest as a robust person tracking ROS-based solution using the Kinect I need a detector and tracker in combination. I could limit the speed of the robot to an extent. I am more considered about the robustness of the detection-tracking of the people (even at the expense of having to use lower speeds) |
| 2016-12-01 06:16:54 -0500 | commented question | What do you suggest as a robust person tracking ROS-based solution using the Kinect Thank for your prompt reply. I am targeting an indoor application. The Kinect is mounted on the robot at the height of approximately 1.2 m and the ground can be assumed to be planar. the robot can move up to 2 .5 m/s. |
| 2016-12-01 04:38:38 -0500 | asked a question | What do you suggest as a robust person tracking ROS-based solution using the Kinect Hi, I am looking for a robust person tracking ROS-based solution for the Kinect. I know there exist a number of different packages but I was wondering which one you recommend as a robust tracking solution when using specifically the Kinect. Thanks a lot in advance. |
| 2016-11-01 01:07:34 -0500 | received badge | ● Famous Question (source) |
| 2016-06-29 09:47:01 -0500 | received badge | ● Notable Question (source) |
| 2016-03-02 21:02:40 -0500 | received badge | ● Notable Question (source) |
| 2015-09-28 14:29:54 -0500 | received badge | ● Famous Question (source) |
| 2015-09-23 03:28:17 -0500 | received badge | ● Notable Question (source) |
| 2015-09-23 03:28:17 -0500 | received badge | ● Popular Question (source) |
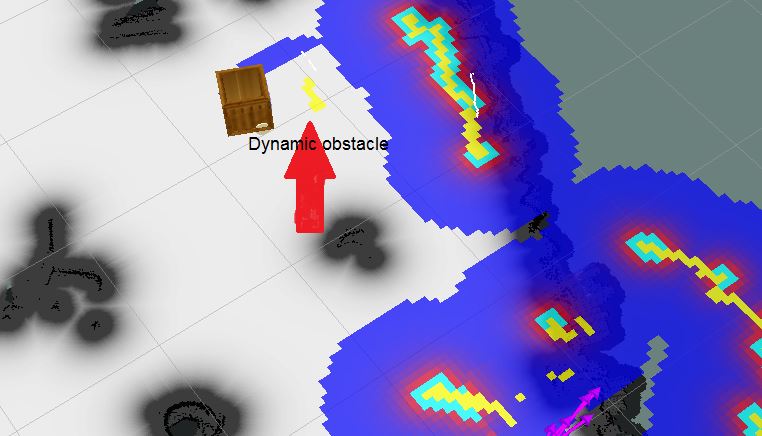
| 2015-09-16 09:18:52 -0500 | marked best answer | problem with obstacle avoidance and the local planner Hello, I have a problem regarding obstacle avoidance and local planning. I have a short range Primesense sensor which gives me the scan for my navigation. I am able to do mapping, localization and fairly good navigation when all obstacles are already incorporated in my map. The problem is that dynamic obstacles are detected and shown in my local costmap but the robot does not take them into account somehow. The strange thing for me is that it inflates the obstacles which are in the map but not the dynamic obstacles even though I have inflation_radius set in my local_costmap_params.yaml. I have this suspicion that it might be that the obstacles are only detected 35 cm away from the kinect and otherwise it thinks that the map is clear and since it plans for a short distance in each step it cant detect the obstacles ( I don't know if it makes sense!) I tried changing the sim_granularity: 0.2 but didn't see a difference. Does anyone have an idea about this? I have attached a snapshot of my rviz. Thanks a lot in advance. |
| 2015-09-16 09:18:52 -0500 | received badge | ● Nice Answer (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}