
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-07-14 03:25:41 -0500 | received badge | ● Famous Question (source) |
| 2016-08-08 16:36:14 -0500 | received badge | ● Famous Question (source) |
| 2015-11-27 07:42:01 -0500 | received badge | ● Notable Question (source) |
| 2015-07-17 07:12:03 -0500 | received badge | ● Taxonomist |
| 2015-04-14 18:43:40 -0500 | received badge | ● Famous Question (source) |
| 2014-12-08 02:10:26 -0500 | received badge | ● Famous Question (source) |
| 2014-10-19 15:19:03 -0500 | received badge | ● Famous Question (source) |
| 2014-09-23 08:19:15 -0500 | received badge | ● Famous Question (source) |
| 2014-09-04 20:15:21 -0500 | received badge | ● Famous Question (source) |
| 2014-08-26 10:32:09 -0500 | received badge | ● Notable Question (source) |
| 2014-08-26 05:17:09 -0500 | commented answer | Does the move_base plan a navigation in real time ? My car can not avoid the obstacles but go forward through the obstacles ,I am confused . should I change some config ?
|
| 2014-08-26 05:07:49 -0500 | received badge | ● Notable Question (source) |
| 2014-08-25 05:54:17 -0500 | received badge | ● Popular Question (source) |
| 2014-08-24 08:04:48 -0500 | commented question | Does the move_base plan a navigation in real time ? Another question , I input the |
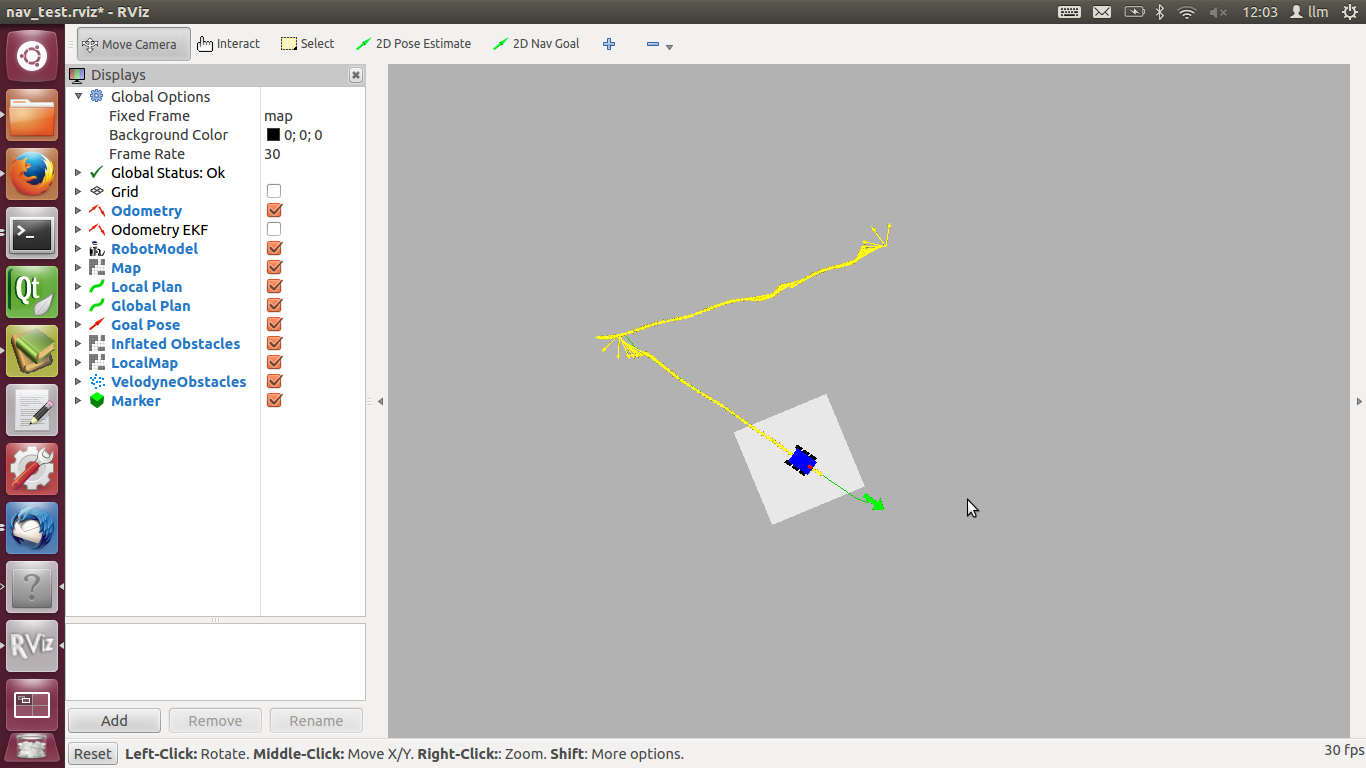
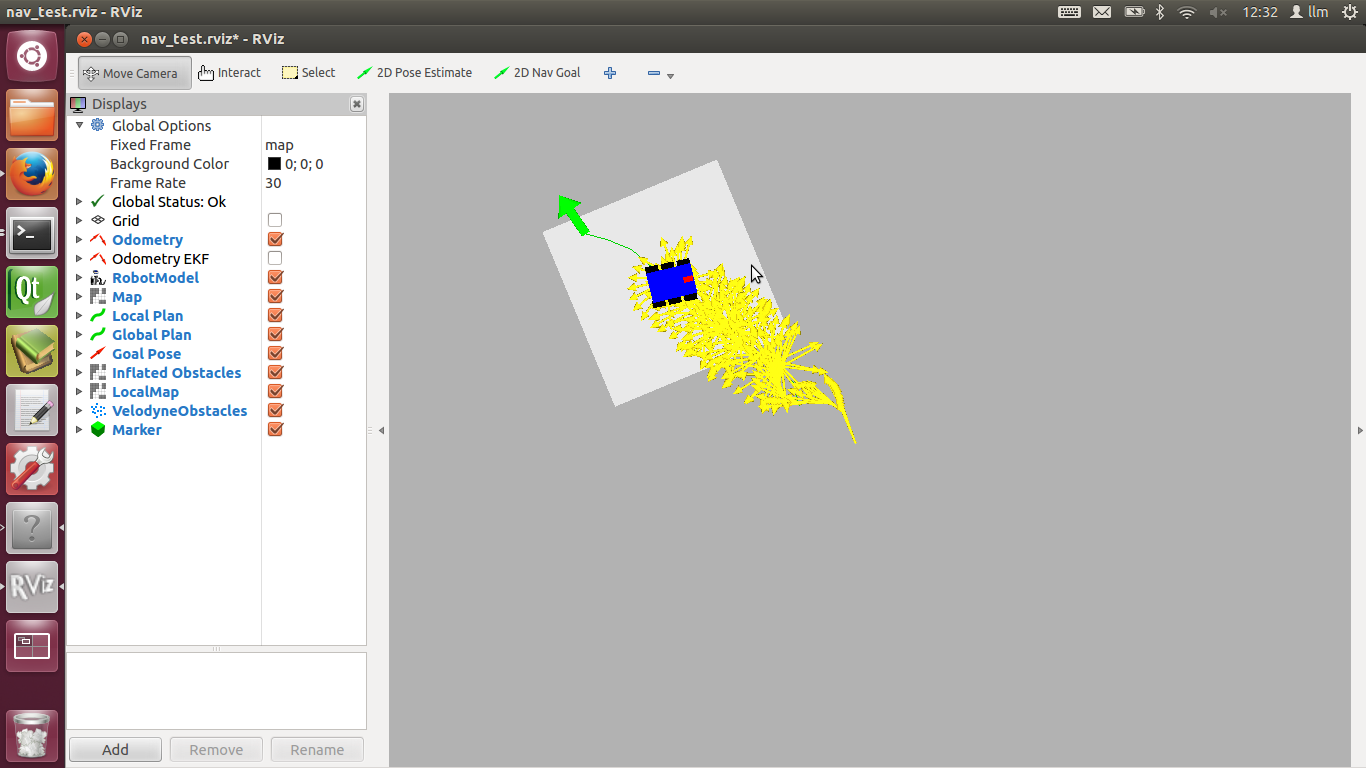
| 2014-08-24 06:41:39 -0500 | asked a question | Does the move_base plan a navigation in real time ? Hello !
Now I meet a new question . I had a LIDAR on my real car , and the pointclouds of obstacle were showed around the simulate car on the blank map . When I give a goal I hope the move_base can plan a navigation in real time . I am confused about it ! |
| 2014-08-23 08:47:00 -0500 | commented answer | edit the package navigation I have solved this problem , thank you for your advice ! |
| 2014-08-22 01:56:17 -0500 | received badge | ● Popular Question (source) |
| 2014-08-20 23:21:25 -0500 | asked a question | edit the package navigation Hello !
I used Before I edit the code , I ran my simulation robot in
|
| 2014-08-11 20:59:48 -0500 | received badge | ● Notable Question (source) |
| 2014-08-11 10:38:34 -0500 | commented question | A question about using tf . I ran the tf view_frames and it does broadcast . But still no point cloud displayed in rviz . |
| 2014-08-11 10:38:34 -0500 | received badge | ● Commentator |
| 2014-08-11 10:22:07 -0500 | received badge | ● Popular Question (source) |
| 2014-08-11 09:39:30 -0500 | commented question | A question about using tf . How to do this step ? |
| 2014-08-11 08:24:50 -0500 | asked a question | A question about using tf . Hello !
I have a LIDAR HDL-32E on my car , and I load a car model in the rviz and display the point cloud . The
But point cloud did not show out ater I add the PointCloud2 in the left window . And it informs an Error :
Maybe I misunderstand the tf and the relationship between reality and simulation . Can tell me what should I do ? |
| 2014-08-10 22:30:32 -0500 | received badge | ● Notable Question (source) |
| 2014-08-10 21:41:21 -0500 | received badge | ● Notable Question (source) |
| 2014-08-10 21:40:31 -0500 | received badge | ● Citizen Patrol (source) |
| 2014-08-10 20:50:08 -0500 | answered a question | two ROS versions in the same time I have not try , but you can try to source the setup.bash file in the /opt/ros/../ in two terminal and the input roscd in each terminal . |
| 2014-08-10 20:45:32 -0500 | commented answer | How to use move_base ? We do not need to load a pre-created map , our car aims to run in a wide range , we do not know how to deal with the map_server . |
| 2014-08-10 15:46:26 -0500 | received badge | ● Popular Question (source) |
| 2014-08-10 02:50:51 -0500 | asked a question | How to use move_base ? Hello ! We team want to develop a UAV recently , and we decide to use move_base in our car's computer . But we meet many questions . Our car equipped a HDL-32E LIDAR , a GPS device . I can understand the structure of Navigation conceptually. structure But we still do not know :
Could you give me some advices ? Thank you very much ! |
| 2014-08-08 03:06:16 -0500 | received badge | ● Enthusiast |
| 2014-08-06 20:23:42 -0500 | marked best answer | A display question about Opencv&ROS Hello , I am learning how to use OpenCV in ROS recently , now I meet a question about display the image . Here is my code : But after I run the code , there is not window display . The terminal just print these information : I can not understand why . Can you help me ? Thank you ! |
| 2014-08-06 19:08:40 -0500 | marked best answer | Detect the objects using velodyne HDL-32E Hello ! I am using the LIDAR velodyne HDL-32E recently . The device was fixed on a car . Now I can get the data from the device using package velodyne , and I need to detect the objects and terrain on the road . So I want to know that is there any package or library can do it ? I notice some information here :http://www.ros.org/news/robots/ said:
Thank you ! |
| 2014-08-06 19:08:37 -0500 | commented answer | Detect the objects using velodyne HDL-32E Yes , thank you for your share ! I think I should search it by myself first :) |
| 2014-08-06 10:57:27 -0500 | received badge | ● Popular Question (source) |
| 2014-08-06 06:43:45 -0500 | received badge | ● Popular Question (source) |
| 2014-08-06 05:54:44 -0500 | commented answer | A display question about Opencv&ROS Yes , the window occurred . Thank you . Maybe it should wait for several ms after imshow or namedwindow in Linux . I never met this problem in win7 with VS or QtCreator . |
| 2014-08-06 02:49:03 -0500 | commented question | A display question about Opencv&ROS I ran the code in http://wiki.ros.org/cv_bridge/Tutorials/UsingCvBridgeToConvertBetweenROSImagesAndOpenCVImages , it still did not occur the window . |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}