| 2022-02-11 13:47:17 -0500 | received badge | ● Favorite Question
(source)
|
| 2019-04-21 19:41:45 -0500 | received badge | ● Famous Question
(source)
|
| 2017-02-07 21:57:50 -0500 | received badge | ● Good Question
(source)
|
| 2016-06-10 05:36:57 -0500 | received badge | ● Famous Question
(source)
|
| 2016-05-08 15:41:39 -0500 | marked best answer | error while installing ros from source on ubuntu arm Hello, Although the website provides methods installing ros on arm, it is an armhf version of Ubuntu .However,I use an armel version of Ubuntu.So I want to install ros from source on the armel version of Ubuntu according to this page http://wiki.ros.org/groovy/Installati...
When I excute $ rosinstall_generator ros_comm --rosdistro groovy --deps --wet-only > groovy-ros_comm-wet.rosinstall
there was an error as follows, Traceback (most recent call last):
File "/usr/local/bin/rosinstall_generator", line 141, in <module>
rc = main()
File "/usr/local/bin/rosinstall_generator", line 129, in main
upstream_version_tag=args.upstream, upstream_source_version=args.upstream_development)
File "/usr/local/lib/python2.7/dist-packages/rosinstall_generator/generator.py", line 247, in generate_rosinstall
wet_package_names, unreleased_repo_names = _get_packages_for_repos(distro_name, repo_names)
File "/usr/local/lib/python2.7/dist-packages/rosinstall_generator/generator.py", line 93, in _get_packages_for_repos
wet_distro = get_wet_distro(distro_name)
File "/usr/local/lib/python2.7/dist-packages/rosinstall_generator/generator.py", line 213, in get_wet_distro
_wet_distro = _get_wet_distro(distro_name)
File "/usr/local/lib/python2.7/dist-packages/rosinstall_generator/distro.py", line 45, in get_distro
return get_cached_distribution(index, distro_name)
File "/usr/local/lib/python2.7/dist-packages/rosdistro/__init__.py", line 134, in get_cached_distribution
cache = get_distribution_cache(index, dist_name)
File "/usr/local/lib/python2.7/dist-packages/rosdistro/__init__.py", line 160, in get_distribution_cache
yaml_gz_str = load_url(url, skip_decode=True)
File "/usr/local/lib/python2.7/dist-packages/rosdistro/loader.py", line 59, in load_url
raise URLError(str(e) + ' (%s)' % url)
urllib2.URLError: <urlopen error <urlopen error [Errno -2] Name or service not known> (http://ros.org/rosdistro/groovy-cache.yaml.gz)>
Please help me slove the problem,thank you very much. |
| 2016-03-03 09:56:48 -0500 | received badge | ● Nice Question
(source)
|
| 2016-03-02 07:56:21 -0500 | marked best answer | install navigation form sources Hello,I have installed the Groovy Ros-Comm from source. Now,I need the navigation package.So I download the navigation source code from Browse Software http://www.ros.org/browse/list.php . At the same time, I download all the packages that navigation depends ,and put them in the navigation.I compiled the navigation using rosmake.Than it shows as following: error: /home/sxl/ros_catkin_ws1/src/navigation-groovy-devel/robot_pose_ekf/include/robot_pose_ekf/nonlinearanalyticconditionalgaussianodo.h:22:59: did not have pdf/analyticconditionalgaussian_additivenoise.h:
In fact,there is the file at bfl/src/.I have download the bfl and put it in the navigation package. PS: I can not install navigation through sudo apt-get install navigation
Please help me.How can I install navigation from source.What causes this error.How to solve it.Thank you very much. [ rosmake ] rosmake starting...
[ rosmake ] No package specified. Building stack ['navigation-groovy-devel']
[ rosmake ] Packages requested are: ['navigation-groovy-devel']
[ rosmake ] Logging to directory /home/sxl/.ros/rosmake/rosmake_output-20141127-143344
[ rosmake ] Expanded args ['navigation-groovy-devel'] to:
['bondcpp', 'bond', 'smclib', 'bondpy', 'test_bond', 'bfl', 'voxel_grid', 'flann', 'pcl_ros', 'nav_core', 'nodelet', 'move_base_msgs', 'pcl', 'dwa_local_planner', 'clear_costmap_recovery', 'move_slow_and_clear', 'base_local_planner', 'rotate_recovery', 'amcl', 'map_server', 'fake_localization', 'robot_pose_ekf', 'move_base', 'laser_geometry', 'nodelet_topic_tools', 'test_nodelet_topic_tools', 'test_nodelet', 'navfn', 'tf_conversions', 'kdl_conversions', 'eigen_conversions', 'tf', 'costmap_2d', 'carrot_planner', 'pcl_msgs']
[rosmake-0] Starting >>> catkin [ make ]
[rosmake-1] Starting >>> bondcpp [ make ]
[rosmake-1] Finished <<< bondcpp ROS_NOBUILD in package bondcpp
No Makefile in package bondcpp
[rosmake-2] Starting >>> eigen_conversions [ make ]
[rosmake-1] Starting >>> kdl_conversions [ make ]
………………
[rosmake-3] Starting >>> std_srvs [ make ]
[rosmake-3] Finished <<< std_srvs ROS_NOBUILD in package std_srvs
No Makefile in package std_srvs
[rosmake-3] Starting >>> amcl [ make ]
[ rosmake ] Last 40 linesbot_pose_ekf: 4.3 sec ] [ costmap_2d: 4.2 sec ] [ actionli... [ 4 Active 69/82 Complete ]
{-------------------------------------------------------------------------------
vals = rospack.get_depends(package, implicit=True)
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 227, in get_depends
s.update(self.get_depends(p, implicit))
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 227, in get_depends
s.update(self.get_depends(p, implicit))
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 227, in get_depends
s.update(self.get_depends(p, implicit))
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 227, in get_depends
s.update(self.get_depends(p, implicit))
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 227, in get_depends
s.update(self.get_depends(p, implicit))
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 221, in get_depends
names = [p.name for p in self.get_manifest(name).depends]
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 159, in get_manifest
return self._load_manifest(name)
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 198, in _load_manifest
retval = self._manifests[name] = parse_manifest_file(self.get_path(name), self._manifest_name, rospack=self)
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 190, in get_path
raise ResourceNotFound(name, ros_paths=self._ros_paths)
rospkg.common.ResourceNotFound: cmake_modules
ROS path [0]=/home/sxl/ros_catkin_ws1/install_isolated/share/ros
ROS path [1]=/home/sxl/ros_catkin_ws1/src/navigation-groovy-devel
ROS path [2]=/home/sxl/ros_catkin_ws1/src/slam_gmapping
ROS path [3]=/home/sxl/ros_catkin_ws1/src/navigation-1.8.3
ROS path [4]=/home/sxl/ros_catkin_ws1/src/common_rosdeps
ROS path [5]=/home/sxl ...
(more) |
| 2016-02-28 03:20:28 -0500 | received badge | ● Famous Question
(source)
|
| 2016-01-28 07:01:54 -0500 | received badge | ● Famous Question
(source)
|
| 2016-01-24 10:25:35 -0500 | received badge | ● Famous Question
(source)
|
| 2016-01-02 08:31:35 -0500 | received badge | ● Famous Question
(source)
|
| 2015-12-22 18:18:47 -0500 | received badge | ● Notable Question
(source)
|
| 2015-12-22 08:41:33 -0500 | received badge | ● Popular Question
(source)
|
| 2015-12-22 02:55:01 -0500 | asked a question | Error while building map with slam Hi everyone, I was trying to build the environment map with slam and hokuyo on my robot. At first, I can view any image. But some times,there was error: Error: m_distanceThresholdCheck overridden!!!! *************
m_distanceThresholdCheck=20
Old Odometry Pose= 0.530987 -6.86704 -2.86229e-17
New Odometry Pose (reported from observation)= 22.7237 -20.1116 0.255681
***********************************************************************
** The Odometry has a big jump here. This is probably a bug in the **
** odometry/laser input. We continue now, but the result is probably **
** crap or can lead to a core dump since the map doesn't fit.... C&G **
***********************************************************************
Laser Pose= 22.7237 -20.1116 0.255681
terminate called after throwing an instance of 'std::bad_alloc'
what(): std::bad_alloc
[slam_gmapping-1] process has died [pid 3044, exit code -6, cmd /opt/ros/hydro/lib/gmapping/slam_gmapping __name:=slam_gmapping __log:=/home/shixiaolu/.ros/log/eb024742-a87b-11e5-a7f9-e0db55f0e591/slam_gmapping-1.log].
log file: /home/shixiaolu/.ros/log/eb024742-a87b-11e5-a7f9-e0db55f0e591/slam_gmapping-1*.log
than, it can not continue to build the map. Is it due to the Odometry has a big jump.
Sometimes,there was the same error but it can go on build a map . For For example Error: m_distanceThresholdCheck overridden!!!! *************
m_distanceThresholdCheck=20
Old Odometry Pose= 0.554374 -3.801 -2.64545e-17
New Odometry Pose (reported from observation)= 22.9707 -3.89147 -0.00402061
***********************************************************************
** The Odometry has a big jump here. This is probably a bug in the **
** odometry/laser input. We continue now, but the result is probably **
** crap or can lead to a core dump since the map doesn't fit.... C&G **
***********************************************************************
Laser Pose= 22.9707 -3.89147 -0.00402061
Deleting Nodes: 0 1 3 4 5 6 8 9 10 11 12 13 14 16 17 18 19 20 21 22 23 26 29 30 31 35 36 37 38 40 41 42 43 44 45 49 51 52 53 54 55 56 57 58 59 60 61 62 63 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 Done
Deleting old particles...Done
Copying Particles and Registering scans... Done
Laser Pose= 22.7086 -3.89028 -0.00359255
Deleting Nodes: 18 26 27 28 29 30 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 68 72 73 74 75 76 77 78 79 Done
Deleting old particles...Done
Copying Particles and Registering scans... Done
Laser Pose= 22.722 -3.89064 -0.00412477
Registering Scans:Done
Laser Pose= 22.6339 -3.89101 -0.00560901
Registering Scans:Done
Laser Pose= 22.3059 -3.88877 -0.00378321
Please help me,How to solve the problem. |
| 2015-10-25 12:30:26 -0500 | received badge | ● Famous Question
(source)
|
| 2015-10-06 23:47:23 -0500 | received badge | ● Famous Question
(source)
|
| 2015-09-25 10:11:56 -0500 | received badge | ● Famous Question
(source)
|
| 2015-09-20 16:21:59 -0500 | received badge | ● Famous Question
(source)
|
| 2015-09-08 21:31:34 -0500 | received badge | ● Supporter
(source)
|
| 2015-09-08 01:38:33 -0500 | received badge | ● Notable Question
(source)
|
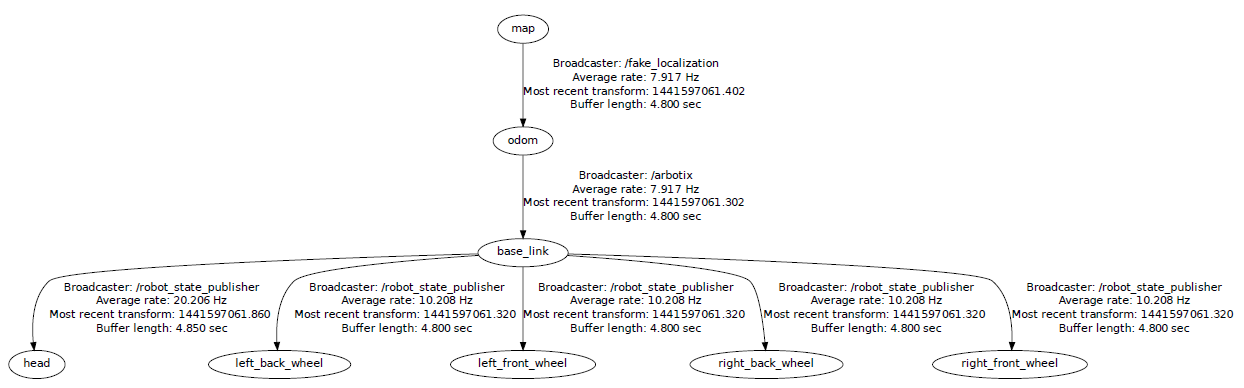
| 2015-09-07 20:26:37 -0500 | commented question | Problem when using navigation stack in the rviz @David Lu I have uploaded the image of tf tree |
| 2015-09-07 10:25:01 -0500 | received badge | ● Popular Question
(source)
|
| 2015-09-07 06:19:51 -0500 | asked a question | Problem when using navigation stack in the rviz Hello everybody,
I'm trying to using navigation stack in the rviz. I have the launch file looks like this: <launch>
<param name="/use_sim_time" value="false" />
<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find smartcar_description)/urdf/smartcar.urdf.xacro'" />
<arg name="gui" default="false" />
<param name="robot_description" command="$(arg urdf_file)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam command="delete" param="/arbotix" />
<rosparam file="$(find smartcar_description)/config/smartcar_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" >
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<node name="map_server" pkg="map_server" type="map_server" args="$(find rbx1_nav)/maps/test_map.yaml"/>
<include file="$(find rbx1_nav)/launch/fake_move_base_amcl.launch" />
<node pkg="fake_localization" type="fake_localization" name="fake_localization" clear_params="true" output="screen">
<remap from="base_pose_ground_truth" to="odom" />
<param name="global_frame_id" value="map" />
<param name="base_frame_id" value="base_link" />
</node>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find rbx1_nav)/nav.rviz" />
</launch>
My fake_move_base_amcl.launch file looks like this: <launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" clear_params="true" output="screen">
<rosparam file="$(find rbx1_nav)/config/fake/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rbx1_nav)/config/fake/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rbx1_nav)/config/fake/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rbx1_nav)/config/fake/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rbx1_nav)/config/fake/base_local_planner_params.yaml" command="load" />
</node>
</launch>
when I run the launch file,there are map and RobotModel.But no autonomous navigation.
The Warning as following: [INFO] [WallTime: 1441624427.388872] Started DiffController (base_controller). Geometry: 0.26m wide, 4100.0 ticks/m.
process[rviz-8]: started with pid [16162]
[ WARN] [1441624432.486553111]: Waiting on transform from base_footprint to map to become available before running costmap, tf error:
[ WARN] [1441624437.562957259]: Waiting on transform from base_footprint to map to become available before running costmap, tf error:
Thank you for any kind of help.. the tf tree looks like:
 |
| 2015-08-03 06:45:58 -0500 | received badge | ● Notable Question
(source)
|
| 2015-07-15 08:13:12 -0500 | received badge | ● Famous Question
(source)
|
| 2015-06-19 14:40:12 -0500 | received badge | ● Notable Question
(source)
|
| 2015-06-18 22:23:50 -0500 | received badge | ● Popular Question
(source)
|
| 2015-06-18 22:23:50 -0500 | received badge | ● Notable Question
(source)
|
| 2015-05-19 22:45:01 -0500 | received badge | ● Notable Question
(source)
|
| 2015-04-30 02:08:35 -0500 | received badge | ● Popular Question
(source)
|
| 2015-04-24 14:13:20 -0500 | received badge | ● Notable Question
(source)
|
| 2015-04-22 04:56:41 -0500 | asked a question | Error while cross-compiling rospkg for arm Hello,I want to cross compile rospackage for arm.I do following the website http://answers.ros.org/question/19107... . I have created rostoolchain.cmake file like this: cmake_minimum_required(VERSION 2.4.6)
include($ENV{ROS_ROOT}/core/rosbuild/rostoolchain.cmake)
set(CMAKE_SYSTEM_NAME Linux)
set(CMAKE_C_COMPILER /opt/freescale/usr/local/gcc-4.6.2-glibc-2.13-linaro-multilib-2011.12/fsl-linaro-toolchain/bin/arm-linux-gcc)
set(CMAKE_CXX_COMPILER /opt/freescale/usr/local/gcc-4.6.2-glibc-2.13-linaro-multilib-2011.12/fsl-linaro-toolchain/bin/arm-linux-g++)
set(CMAKE_FIND_ROOT_PATH /opt/freescale/usr/local/gcc-4.6.2-glibc-2.13-linaro-multilib-2011.12/fsl-linaro-toolchain)
set(CMAKE_LIBRARY_PATH /opt/freescale/usr/local/gcc-4.6.2-glibc-2.13-linaro-multilib-2011.12/fsl-linaro-toolchain/lib /home/znzx/boost/lib /opt/ros/hydro/lib)
set(CMAKE_INCLUDE_PATH /home/znzx/boost/include /opt/ros/hydro/include /usr/include)
set(BOOST_LIBRARY /home/znzx/boost/lib)
set(BOOST_INCLUDE /home/znzx/boost/include)
set(BOOST_ROOT /home/znzx/boost)
set(CMAKE_FIND_ROOT_PATH_MODE_PROGRAM BOTH)
set(CMAKE_FIND_ROOT_PATH_MODE_LIBRARY ONLY)
set(CMAKE_FIND_ROOT_PATH_MODE_INCLUDE ONLY)
set(CMAKE_FIND_ROOT_PATH_MODE_PACKAGE ONLY)
When I excute $./src/catkin/bin/catkin_make_isolated -DCMAKE_TOOLCHAIN_FILE=/home/znzx/catkin_ws/src/rostoolchain.cmake
I got the following errors: -- Looking for include files CMAKE_HAVE_PTHREAD_H - found
-- Looking for pthread_create in pthreads
-- Looking for pthread_create in pthreads - not found
-- Looking for pthread_create in pthread
-- Looking for pthread_create in pthread - found
-- Found Threads: TRUE
-- Found gtest sources under '/usr/src/gtest': gtests will be built
CMake Error at cmake/assert.cmake:17 (message):
Assertion failed: check for file existence, but filename
(RT_LIBRARY-NOTFOUND) unset. Message: RT Library
Call Stack (most recent call first):
cmake/tools/rt.cmake:42 (assert_file_exists)
cmake/all.cmake:148 (include)
CMakeLists.txt:8 (include)
-- Configuring incomplete, errors occurred!
<== Failed to process package 'catkin':
Command 'cmake /home/znzx/ros_catkin_ws/src/catkin -DCATKIN_DEVEL_PREFIX=/home/znzx/ros_catkin_ws/devel_isolated/catkin -DCMAKE_INSTALL_PREFIX=/home/znzx/ros_catkin_ws/install_isolated -DCMAKE_TOOLCHAIN_FILE=/home/znzx/catkin_ws/src/rostoolchain.cmake' returned non-zero exit status 1
Reproduce this error by running:
==> cd /home/znzx/ros_catkin_ws/build_isolated/catkin && cmake /home/znzx/ros_catkin_ws/src/catkin -DCATKIN_DEVEL_PREFIX=/home/znzx/ros_catkin_ws/devel_isolated/catkin -DCMAKE_INSTALL_PREFIX=/home/znzx/ros_catkin_ws/install_isolated -DCMAKE_TOOLCHAIN_FILE=/home/znzx/catkin_ws/src/rostoolchain.cmake
Command failed, exiting.
What is RT library? How can I do to solve the problem? Please help me.thank you very much |
| 2015-04-20 22:51:40 -0500 | commented answer | Compile roscore for ARM board @GummyBear I want to cross compile my custom ROS packages.Is it must cross compile ros,at first? My board can run roscore,but it achieve not by cross-compiler.Can I cross compile my own package wthout cross-compiling roscore? |
| 2015-04-19 19:41:05 -0500 | received badge | ● Popular Question
(source)
|
| 2015-04-15 21:51:25 -0500 | asked a question | How to cross-compile ros-pkg for arm Hello. Due to using the armel, I install the ros from the source. Now the roscore can run on the arm succesfully. The ROS packages are compiled directly on board. I want to cross-compile it. But the eros seems to have been abandoned. So I do as the following:
Create the cmakelists.txt cmake_minimum_required(VERSION 2.4.6)
include($ENV{ROS_ROOT}/core/rosbuild/rostoolchain.cmake)
set(CMAKE_SYSTEM_NAME Linux)
set(CMAKE_C_COMPILER /opt/usr/local/gcc-4.6.2-glibc-2.13-linaro-multilib-2011.12/fsl-linaro-toolchain/bin/arm-linux-gcc)
set(CMAKE_CXX_COMPILER /opt/usr/local/gcc-4.6.2-glibc-2.13-linaro-multilib-2011.12/fsl-linaro-toolchain/bin/arm-linux-g++)
set(CMAKE_FIND_ROOT_PATH /opt/usr/local/gcc-4.6.2-glibc-2.13-linaro-multilib-2011.12/fsl-linaro-toolchain)
set(CMAKE_FIND_ROOT_PATH_MODE_PROGRAM BOTH)
set(CMAKE_FIND_ROOT_PATH_MODE_LIBRARY ONLY)
set(CMAKE_FIND_ROOT_PATH_MODE_INCLUDE ONLY)
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
set(LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/lib)
ADD_EXECUTABLE(mrobot_driver src/mrobot_driver.cpp src/mrobot_comms.c)
SET(BOOST_ROOT /usr/include/boost)
than : $ camke .
$ make
I got the error messages: Building CXX object CMakeFiles/mrobot_driver.dir/src/mrobot_driver.o
In file included from /opt/ros/hydro/include/ros/ros.h:38:0,
from /home/znzx/cmake/ros/mrobot_driver1/src/mrobot_driver.h:40,
from /home/znzx/cmake/ros/mrobot_driver1/src/mrobot_driver.cpp:40:
/opt/ros/hydro/include/ros/time.h:58:50: fatal error: boost/math/special_functions/round.hpp: No such file or directory
compilation terminated.
make[2]: *** [CMakeFiles/mrobot_driver.dir/src/mrobot_driver.o] Error 1
make[1]: *** [CMakeFiles/mrobot_driver.dir/all] Error 2
make: *** [all] Error 2
While , boost/math/special_functions/round.hpp does exists. And the path of boost is right.
Is the method of cross_compiling correct? Please help me.thank you very much. |
| 2015-04-04 20:22:19 -0500 | received badge | ● Popular Question
(source)
|
| 2015-03-24 22:49:29 -0500 | asked a question | Can not install eros successfully Hello,I want to cross-compile ROS for ARM.I am trying to use eros according to http://wiki.ros.org/eros/Installation . When I run $ rosinstall /opt/ros eros_diamondback.rosinstall It shows:ERROR in config:Is not a local file,nor a valid URL [eros_diamondback.rosinstall]:unknown url type:eros_diamondback.rosinstall svn co https://code.ros.org/svn/eros/tags/diamondback ./eros
It also can not install successfully . Is the eros discarded? |
| 2015-03-01 23:52:27 -0500 | asked a question | error while using openembedded to cross-compile ros Hello, I want to cross-compile the packages of ros, so that it can use on the arm.I am doing according to http://wiki.ros.org/hydro/Installatio... . When I execute: $ bitbake core-image-ros-roscore ,there was the following error: Loading cache: 100% |######################################################| ETA: 00:00:00
Loaded 2176 entries from dependency cache.
Parsing recipes: 100% |####################################################| Time: 00:00:01
Parsing of 1701 .bb files complete (1698 cached, 3 parsed). 2178 targets, 68 skipped, 0 masked, 0 errors.
ERROR: No recipes available for:
/home/znzx/devel/meta-ros/recipes-devtools/python/python_2.7.3.bbappend
/home/znzx/devel/meta-ros/recipes-devtools/python/python-native_2.7.3.bbappend
Summary: There was 1 ERROR message shown, returning a non-zero exit code.
Please help me to solve the problem.Thank you very much. |
| 2015-03-01 23:49:14 -0500 | received badge | ● Famous Question
(source)
|

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.