The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-09-30 22:29:59 -0500 | received badge | ● Famous Question (source) |
| 2019-06-20 13:31:01 -0500 | received badge | ● Great Answer (source) |
| 2019-06-12 10:51:53 -0500 | received badge | ● Popular Question (source) |
| 2016-07-14 13:48:29 -0500 | received badge | ● Famous Question (source) |
| 2016-05-08 15:31:15 -0500 | marked best answer | ROS Hydro Amazon EC2 I'm using ubuntu 12.04, ros hydro, and my computer seems to be too slow sometimes, making ros crashes. So I'm wondering if I should use a cloud services. Did somebody already use the Amazone EC2? If yes, did it work fine? Thank you |
| 2016-05-08 15:27:54 -0500 | marked best answer | How to create .world from .yaml I have a map (the .png file and the .yaml file) and I want to create a .world file, how to do this? Thank you |
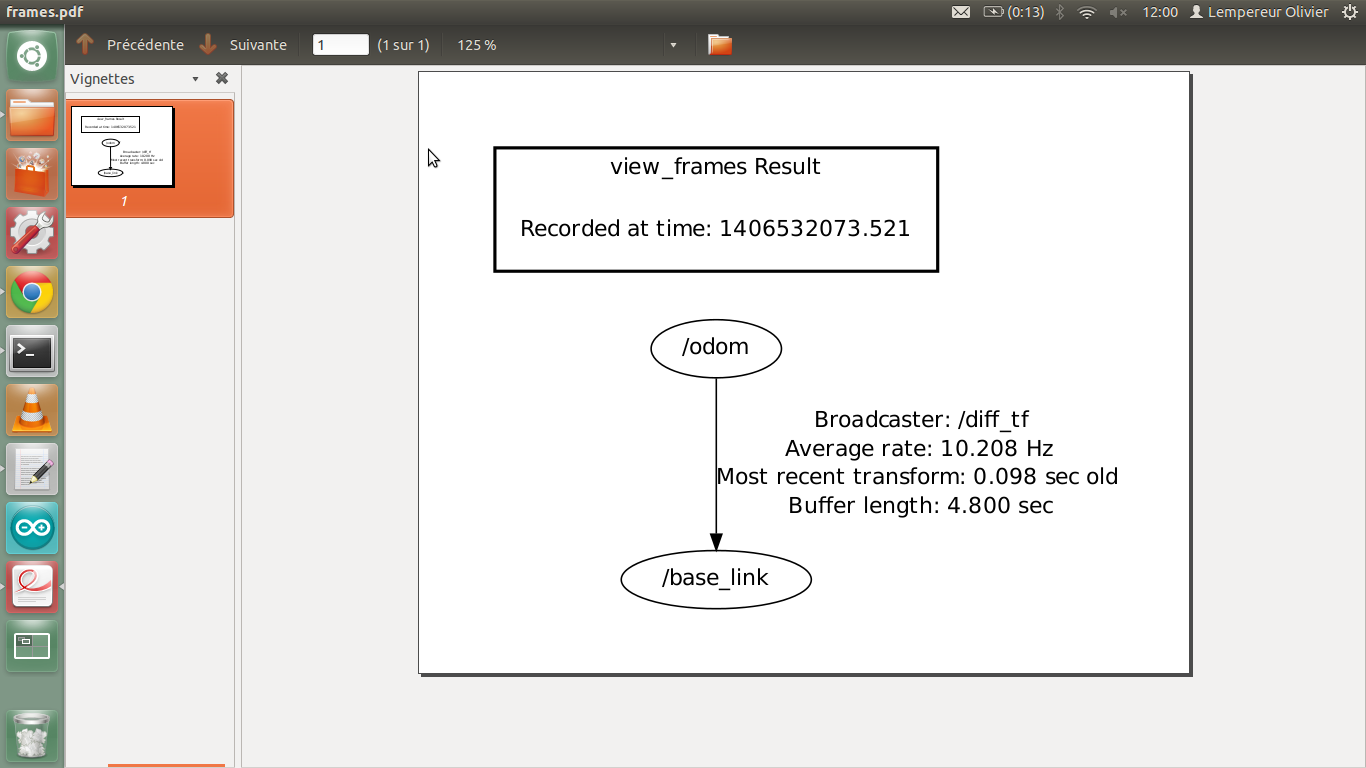
| 2016-05-08 15:25:42 -0500 | marked best answer | [Groovy] How to link /scan to base_link? When I launch my move_base.launch, ( http://wiki.ros.org/navigation/Tutori... ) , I got this error : This is my frames.pdf file
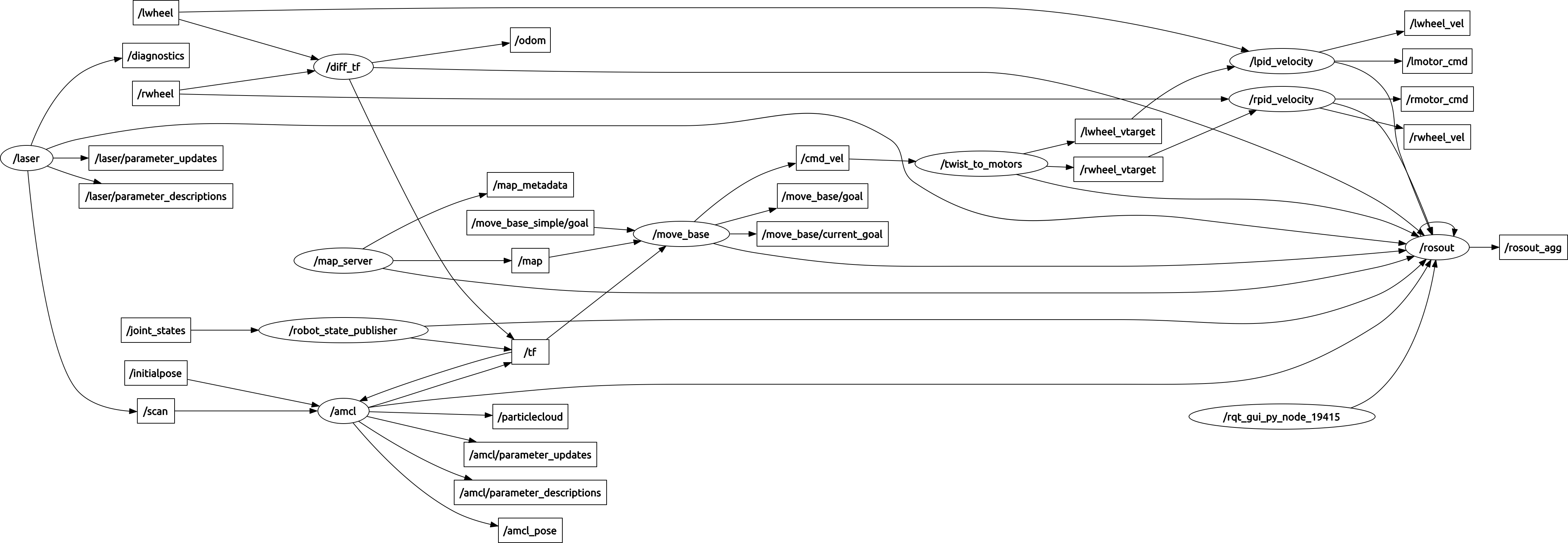
This is the rqt_graph :
|
| 2016-05-08 15:23:16 -0500 | marked best answer | how to divide a map (pgm) in little cell I want to code a complete coverage path planner. So first I got a map, and I want to know how can I divide my map in little square cell and in the middle of each cell put a point. With visualization_msg, the point can just be seen by us, and not by the robot. What I want is that this point can be seen by it. So then I will be able to tell to my robot to get throw all the mark. Thank you |
| 2016-05-04 11:00:54 -0500 | received badge | ● Famous Question (source) |
| 2016-05-03 08:03:33 -0500 | received badge | ● Taxonomist |
| 2016-03-13 20:01:19 -0500 | received badge | ● Famous Question (source) |
| 2016-03-10 05:03:41 -0500 | received badge | ● Famous Question (source) |
| 2016-03-08 06:06:24 -0500 | received badge | ● Notable Question (source) |
| 2016-03-08 06:06:24 -0500 | received badge | ● Popular Question (source) |
| 2016-02-26 07:21:23 -0500 | received badge | ● Good Answer (source) |
| 2016-02-15 11:02:53 -0500 | received badge | ● Favorite Question (source) |
| 2015-11-14 09:16:30 -0500 | received badge | ● Famous Question (source) |
| 2015-10-16 17:14:41 -0500 | received badge | ● Nice Answer (source) |
| 2015-08-31 06:23:49 -0500 | received badge | ● Teacher (source) |
| 2015-08-31 06:23:49 -0500 | received badge | ● Necromancer (source) |
| 2015-06-24 02:07:34 -0500 | received badge | ● Famous Question (source) |
| 2015-05-05 04:54:58 -0500 | received badge | ● Famous Question (source) |
| 2015-04-28 06:41:37 -0500 | received badge | ● Notable Question (source) |
| 2015-04-27 01:02:43 -0500 | received badge | ● Famous Question (source) |
| 2015-02-18 07:57:30 -0500 | commented answer | Targus remote control as a teleop input? Thanks a lot, I'm gonna try this solution |
| 2015-02-13 09:03:25 -0500 | asked a question | Targus remote control as a teleop input? Hi, I'm trying to use a targus amp13eu has a way to teleoperate my robot. Has anyone already done that or would know how to do? Thanks a lot for your help! |
| 2015-02-05 09:45:16 -0500 | received badge | ● Famous Question (source) |
| 2015-01-20 02:54:38 -0500 | received badge | ● Notable Question (source) |
| 2015-01-08 03:50:40 -0500 | marked best answer | [hydro] Error in move_base.launch When I launch my move_base.launch, ( http://wiki.ros.org/navigation/Tutori... ) , I got this error : This is my base_local_planner.yaml file |
| 2015-01-08 03:50:10 -0500 | received badge | ● Notable Question (source) |
| 2014-11-19 11:51:29 -0500 | received badge | ● Famous Question (source) |
| 2014-11-07 08:06:29 -0500 | received badge | ● Notable Question (source) |
| 2014-10-31 14:54:41 -0500 | received badge | ● Famous Question (source) |
| 2014-10-03 02:36:52 -0500 | received badge | ● Notable Question (source) |
| 2014-09-18 12:26:38 -0500 | received badge | ● Famous Question (source) |
| 2014-09-18 05:55:58 -0500 | received badge | ● Famous Question (source) |
| 2014-09-16 04:56:44 -0500 | marked best answer | Full coverage path planner I have a differential robot, with a laser Hokuyo, and I want my robot to cover the whole part of a map. I saw that there is some algorithms but I can't find a code. So have someone already implement such algorithms? Thank you |
| 2014-08-29 06:00:36 -0500 | received badge | ● Famous Question (source) |
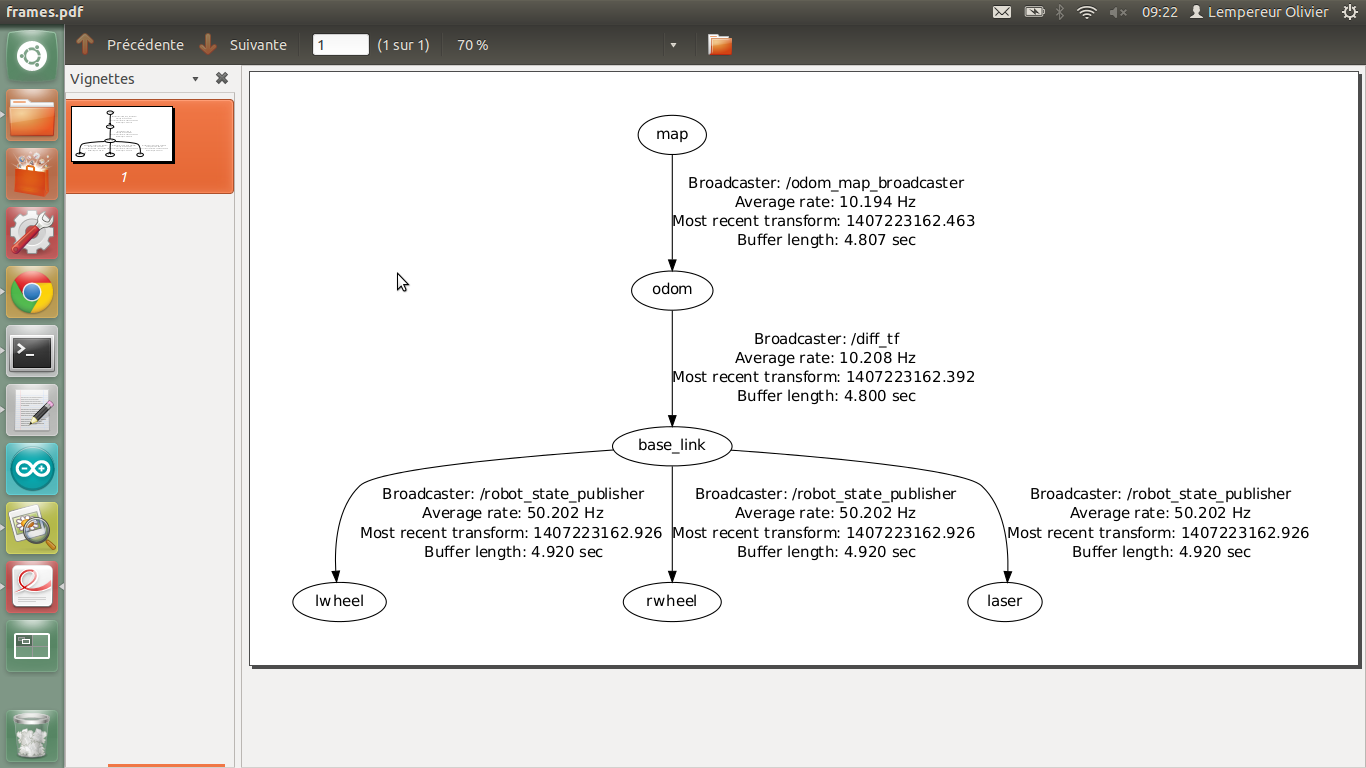
| 2014-08-25 05:53:19 -0500 | edited question | [Hydro] Error in move_base.launch rviz I succed finally to launch my move_base.launch file. And when with rviz I tried to tell where the robot is in the map, with the 2d Pose Estime, i got this message : I think that there is a link with my previous problem http://answers.ros.org/question/18796... This is my view_frames
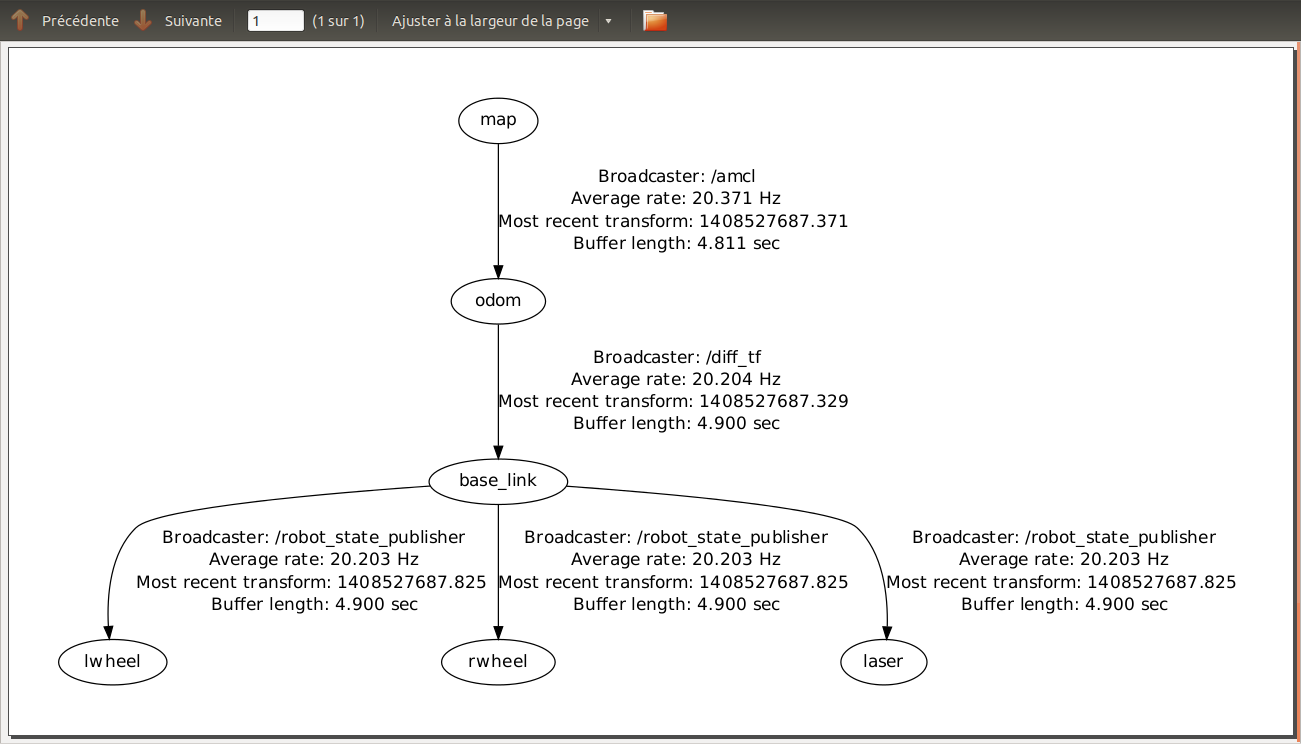
My local costmap is : My global costmap is global_costmap: global_frame: /map robot_base_frame: base_link update_frequency: 5.0 static_map: true The link beetween map and /odom is done in the move_base.launch file : When I launched roswtf i got this error Update The new tf view_frames
|
| 2014-08-25 05:52:31 -0500 | received badge | ● Notable Question (source) |
| 2014-08-25 04:34:55 -0500 | commented answer | TurtleBot Autonomous Navigation Not Moving to Desired Point did you solve the issue? |
| 2014-08-25 04:32:59 -0500 | commented question | Move_base is stuck while status is ACTIVE Did some solve the issue? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.