The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-06-27 15:21:16 -0500 | received badge | ● Nice Question (source) |
| 2019-01-10 11:07:08 -0500 | received badge | ● Good Question (source) |
| 2018-09-14 17:25:52 -0500 | marked best answer | Anyone using Asus K55VM-SX086D Laptop for running ROS Hello community I saw few threads regarding laptop recommendation, please forgive me for adding one more. I am planning to buy Asus K55VM-SX086D Laptop (http://www.flipkart.com/asus-k55vm-sx086d-laptop-3rd-gen-ci7-8gb-1tb-dos-2gb-graph/p/itmd7vs3cgw4twkr) I am going for a laptop coz I will be moving a lot (so desktop is not an option). Mostly I will be doing my work on a simulated home environment with PR2 robot. Running object manipulation stack (and also navigation). Kindly let me know:-
Thanks |
| 2017-08-19 17:53:42 -0500 | commented question | Can we simulate a deformable object in Gazebo now? Hi mzWang, Did you find a sol/workaround? If so let me know (I want to simulate rubber ball, vegitables etc) I assume u |
| 2017-08-19 17:47:37 -0500 | commented question | Can we simulate a deformable object in Gazebo now? Hi mzWang, Did you find a solution or a workaround? I also want to simulate deformable and soft objects like rubber bal |
| 2017-08-19 17:46:39 -0500 | commented question | Can we simulate a deformable object in Gazebo now? Hi mzWang, Did you find a solution or a workaround? I also want to simulate deformable objects, I was wondering which s |
| 2016-11-24 08:30:48 -0500 | received badge | ● Famous Question (source) |
| 2016-11-24 08:30:28 -0500 | received badge | ● Self-Learner (source) |
| 2016-03-03 14:24:31 -0500 | received badge | ● Nice Question (source) |
| 2015-04-26 01:26:58 -0500 | received badge | ● Famous Question (source) |
| 2015-04-01 05:59:53 -0500 | received badge | ● Famous Question (source) |
| 2015-03-03 01:55:07 -0500 | received badge | ● Famous Question (source) |
| 2015-02-06 09:16:05 -0500 | received badge | ● Self-Learner (source) |
| 2015-02-06 09:16:05 -0500 | received badge | ● Teacher (source) |
| 2015-02-06 09:16:00 -0500 | received badge | ● Good Question (source) |
| 2015-01-15 13:36:46 -0500 | received badge | ● Famous Question (source) |
| 2014-12-11 07:48:09 -0500 | received badge | ● Nice Question (source) |
| 2014-12-07 16:53:07 -0500 | received badge | ● Famous Question (source) |
| 2014-07-21 20:26:58 -0500 | received badge | ● Notable Question (source) |
| 2014-07-20 22:33:43 -0500 | received badge | ● Popular Question (source) |
| 2014-07-20 11:11:08 -0500 | answered a question | Creating a better mesh I found that this could be easily done using MLS (moving-least-squares). The tutorial given at: http://pointclouds.org/documentation/... helps in generating smooth mesh. However when I try to combine it with mesh generation code in one go, I got segmentation fault. Any help there is greatly appreciated. I have asked it at: http://answers.ros.org/question/18718... |
| 2014-07-20 11:10:48 -0500 | asked a question | Unable to combine MLS and mesh generation in one file Hi, I am able to do MLS and then also generate mesh, but I need to do both of them separately. I am not able to find a way to do it in one go. First I do MLS and save the file. And then read that file again and generate mesh. If I combine both I am encountering segmentation fault. The code does MLS successfully but than fails. The two tutorials which I tried to combine are: Greedy projection : http://pointclouds.org/documentation/... and MLS : http://pointclouds.org/documentation/... Also since MLS itself compute the surface normal so I commented the part of the code where normal are generated. Any help of pointers is greatly appreciated. Let me know if I ask PCL related questions somewhere else? My combined code is: |
| 2014-07-20 11:00:37 -0500 | received badge | ● Famous Question (source) |
| 2014-07-20 11:00:37 -0500 | received badge | ● Notable Question (source) |
| 2014-07-20 11:00:37 -0500 | received badge | ● Popular Question (source) |
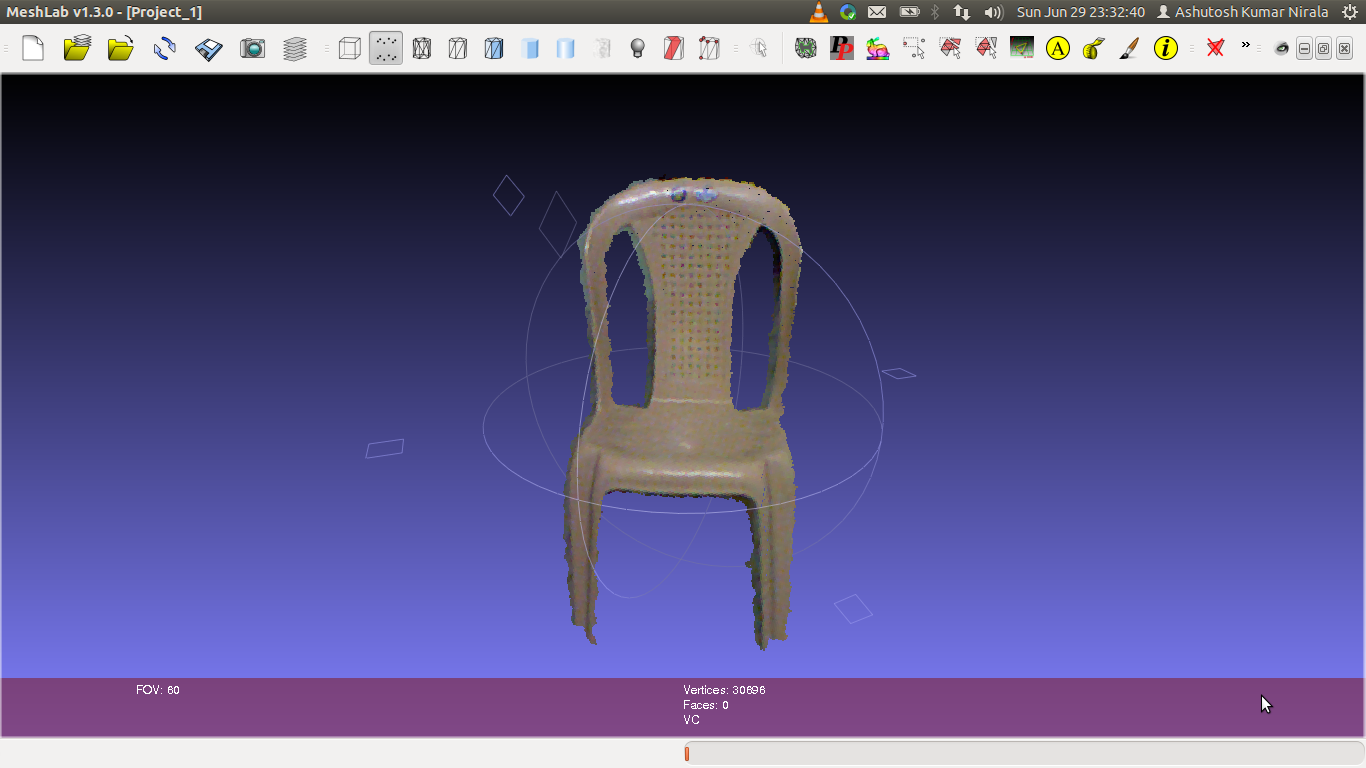
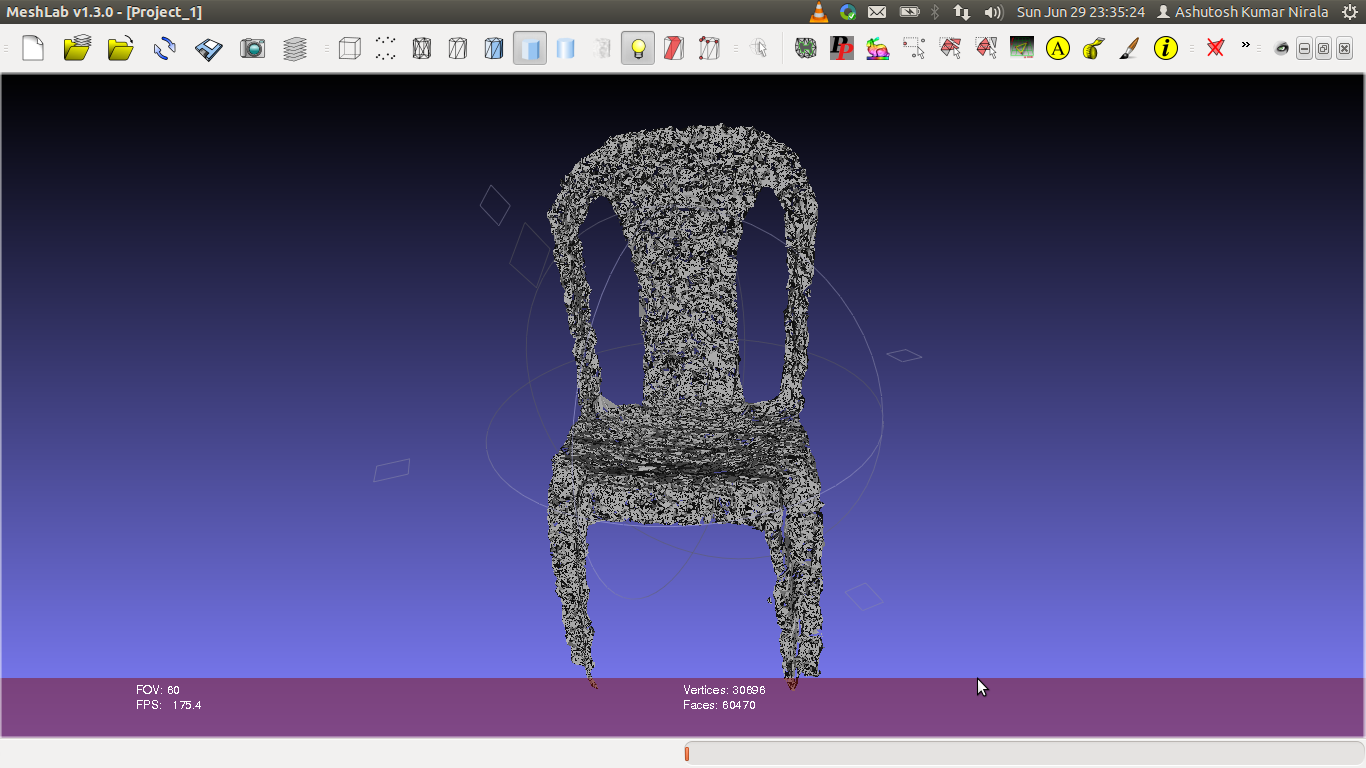
| 2014-06-29 13:17:11 -0500 | asked a question | Creating a better mesh Hi, I wanted to create mesh of household objects, so that I can later recreate the household scene in Gazebo. I want to use kinect and think that interactively, it can be done quite easily. My exact problem: After capturing the scene using kinect, I am able to filter out chair, the front view of the chair looks: However when I am trying to create a mesh from it (using PCL, tutorial at: http://pointclouds.org/documentation/... I am not able to set optimal size of triangles. My mesh looks like:
I need a smooth mesh. As if a low pass filter is passed on it. How can I achieve that. Any help or pointer is greatly appreciated. |
| 2014-06-16 09:52:16 -0500 | commented answer | Making a mesh model from a point cloud: What are the plans for the model_mesher from the tod_training package? I know toooooooooo old a link, but is there anything like model mesher available as of now? |
| 2014-04-20 14:13:53 -0500 | marked best answer | Using custom messages and service in ROSJAVA Hi, I have been trying to understand ROSJAVA from a while, seems a bit difficult as I couldn't find good tutorials (last week tutorials for Hydro were updated which was v v helpful (many many thanks for that), though they are not sufficient :-( ). I am using Ubuntu 12.04 and Hydro. I manage to run ROSJAVA Publishers and subscribers as directed at: http://rosjava.github.io/rosjava_core/latest/getting_started.html I was able to run Talker from java end and listen it from C++ end, however I am still struggling to find out, how can I use my custom message. Here is my directory structure ~/catkin_ws (catkin workspace, in setup.sh I am doing source ~/catkin_ws/devel/setup.bash) ~/catkin_ws/src/foo_msgs/msg/foo.msg (contains std_msgs/String data) ~/catkin_ws/src/foo_msgs/srv/AddTwoInts.srv (for checking service, to be checked once I manage to run cutsom messgaes) ~/catkin_ws/src/foo_msgs/CMakeLists.txt (contains entries to generate message as directed at : http://wiki.ros.org/ROS/Tutorials/CreatingMsgAndSrv) ~/catkin_ws/src/foo_msgs/package.xml ~/catkin_ws/src/myjava_pkgs (ROSJAVA package, created using : catkin_create_rosjava_pkg myjava_pkgs rosjava_bootstrap rosjava_messages foo_msgs) ~/catkin_ws/src/myjava_pkgs/foo_msgs (cretaed by : catkin_create_rosjava_msg_project foo_msgs as given at : http://wiki.ros.org/rosjava/Tutorials/hydro/Unofficial%20Messages) ~/catkin_ws/src/myjava_pkgs/pub_sub (using: catkin_create_rosjava_project pub_sub, as given at: http://wiki.ros.org/rosjava_build_tools/Tutorials/hydro/Creating%20Rosjava%20Packages This automatically created : ~/catkin_ws/src/myjava_pkgs/pub_sub/src/main/java/com/github/rosjava/pub_sub/Dude.java) Then I created Talker.java and Listener.java in:- ~/catkin_ws/src/myjava_pkgs/pub_sub/src/main/java/org/ros/rosjava_tutorial_pubsub/ as given at: http://rosjava.github.io/rosjava_core/latest/getting_started.html settings.gradle at ~/catkin_ws/src/myjava_pkgs contains:- include 'foo_msgs' include 'pub_sub' I updated ~/catkin_ws/src/myjava_pkgs/pub_sub/build.gradle seeing http://wiki.ros.org/rosjava_core/graveyard/rosjava_tutorial_pubsub The exact content of build.gradle is:- apply plugin: 'application'
mainClassName = 'org.ros.RosRun'
apply plugin: 'java'
apply plugin: 'maven'
apply plugin: 'eclipse'
// uncomment to create an eclipse project using 'gradle eclipse'
//apply plugin: 'eclipse'
sourceCompatibility = 1.6
targetCompatibility = 1.6
// custom maven repository for some rosjava dependencies
repositories {
mavenLocal()
maven {
url 'http://robotbrains.hideho.org/nexus/content/groups/ros-public'
}
}
// we need this for maven installation
version = '0.0.0-SNAPSHOT'
group = 'ros.my_stack'
dependencies {
compile 'org.ros.rosjava_core:rosjava:[0.1,)'
}
Now, I am able to compile it from: /catkin_ws/src/myjava_pkgs/pub_sub$ using: ../gradlew installApp and able to run Talker using: ./build/install/pub_sub/bin/pub_sub org.ros.rosjava_tutorial_pubsub.Talker My questions are:-
|
| 2014-04-20 14:06:39 -0500 | marked best answer | Running PCL in Hydro Hi, It took me a while to run the sample code for down-sampling a point cloud using voxel grid, as given in tutorial page at : http://wiki.ros.org/pcl/Tutorials?action=AttachFile&do=view&target=example_voxelgrid.cpp, tutorial link : http://wiki.ros.org/pcl/Tutorials
I am quite sure that these changes must be done by many ppl who have run this tutorial and quite sad that they were not updated. Changes are a bit trivial once you understand, but still tutoral should run without giving any error, so that ppl like me could understand things easily :-). |
| 2014-04-20 13:36:28 -0500 | marked best answer | Finding a frame pose given pose (calculated) of another frame Hello everyone, I am publishing r_gripper_pick_pose as, say, : <node name="btw_bl_rpp" pkg="tf" type="static_transform_publisher" args= "3 1 8 0 0 0 1 base_link r_gripper_pick_pose 10" respawn="false" output="screen" /> I calculate the pose (with direction) for this frame (r_gripper_pick_pose) (say to pick up sth). Lets call it Calc_grasp_pose. How can I find the base_link (i.e, robot pose) pose wrt the Calc_grasp_pose? I guess I can not use TF for this as there is no frame being published which is b/w existing farmes and r_gripper_pick_pose. i.e, how can I use TF, if at all, to get new pose with transformation between two poses instead of two frames? I am using ros electric. Update:- For clarification consider the following figure :
Consider a) I am considering base_link to be at origin. And all poses are described wrt it. And for this case consider that robot is at orientation of 0 degrees if it is facing in +y direction (unlike +x in usual case of PR2 (i realized this after drawing the figure :-) )) I need to move the robot (described by the big circle, with its gripper pose frame described by a small circle) such that its gripper is at the desired pose of (-5,3,8) and orientation (w,x,y,z) : (0,0,0,1), which is my calc_grasp_pose So my desired situation is b). So I need the pose : (-4,1,0) and (w,x,y,z) : (0.7071, 0, 0, 0.7071) as output. if I simply define the desired pose in r_gripper_pick_pose and use transformPose to get it into the base_link frame I will get back the desired pose of the r_gripper_pick_pose only or calc_grasp_pose. (Correct me if I am wrong) The reason why I think I can't use TF is : the transformation between calc_grasp_pose and poses of other frames (like r_gripper_pick_pose, base_link) is dynamic and is not in tf. calc_grasp_pose is not a frame, it is not published. So one way for me could be to find the rotation and translation matrix which when applied to current r_gripper_pick_pose translates it to calc_grasp_pose, and then apply the same to base_link (in the picture base_link is at origin, but it could be anywhere). As described at : http://web.iitd.ac.in/~hegde/cad/lecture/L6_3dtrans.pdf Is there any existing function which I can use in tf or some other place which I can use? Thnks. |
| 2014-04-20 13:35:06 -0500 | marked best answer | resetting turtlebot odometry in simulation Hi, Is there a way to reset the odometry in simulation of turtlebot. When I reset the Gazebo world the data published via topic /odom and /robot_pose_ekf/odom remains unchanged. Probably that is because it is not part of the gazebo. Is there a way I can reset it. Edit : I am using electric on Ubuntu 11.10 |
| 2014-04-20 13:33:54 -0500 | marked best answer | how to display rviz markers at a fixed location Hi, I need to display markers (currently few arrows, showing path for robot) at a fixed point wrt my simulated environment. The environment has turtlebot and few objects. While publishing markers if I set marker.header.frame_id = "/odom", then I get the desired result as long as robot does not collide or I don't reset the environment. Before publishing the markers if I call service /gazebo/get_model_state and get the robot state, and use that to apply inverse transformation to the markers, and use /base_link in marker.header.frame_id, then I get what I need. But I am sure there must be a simpler way to do this. What should be my frame in marker.header.frame_id or how can I use TF to do this easily. As of now I am using only 2D inverse transformation, so when robot collides then for some time the markers are displayed at different location. I am using electric on Ubuntu 11.10 |
| 2014-04-20 13:21:58 -0500 | marked best answer | Doing navigation, while avoiding some region Hi All, I am using navigation stack with PR2 and turtlebot in a simulated home environment. Is it possible to constrain the path of the robot so that it can avoid some region. For example, say floor of the room has white tiles with few red tiles at center, and I want the robot, not to run over the red tiles. Or say there is some marking or carpeting on the path (having different color), and I need the robot to do navigation only on that path. Any suggestion or pointers on how I can achieve this will be greatly appreciated. I needed this for executing action for a command like : "Move to the chair, avoiding the red region." |
| 2014-04-20 13:07:19 -0500 | marked best answer | Unable to include .model files for objects in .world file (for simulation) in Ubuntu 12.04 fuerte Hi, After installing Ubuntu 12.04 and fuerte (today), I am unable to launch most of my world file, which were running smoothly on electric on Ubuntu 11.10. as per the error I think there is some new way to include .model file of an object in the .world file. Kindly provide me the pointers for that. To test (that error is not with my made .world and .model files), I included simple_office_table.world file from gazebo_world package. The .model files are included as : (in simple_office_table.world file) .
.
<model:physical name="desk4_model">
<xyz>2.28 -0.21 0</xyz>
<rpy>0.0 0.0 0.0 </rpy>
<include embedded="true">
<xi:include href="../objects/desk4.model" />
</include>
</model:physical>
<model:physical name="desk5_model">
<xyz>2.25 -3.0 0</xyz>
<rpy>0.0 0.0 0.0 </rpy>
<include embedded="true">
<xi:include href="../objects/desk5.model" />
</include>
</model:physical>
.
.
and my launch file is <launch>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<group if="$(arg gui)">
<node name="gazebo_gui" pkg="gazebo" type="gui" respawn="false" output="screen"/>
</group>
</launch>
When I launch it in fuerte I get error saying Opening and ending tag mismatch, as:- Msg Waiting for master.Warning [parser.cc:348] Gazebo SDF has no gazebo element
Entity: line 211: parser error : Opening and ending tag mismatch: physical line 206 and include
</include>
^
Entity: line 212: parser error : Opening and ending tag mismatch: world line 3 and physical
</model:physical>
^
Entity: line 215: parser error : Extra content at the end of the document
<model:physical name="desk5_model">
^
Error [parser_deprecated.cc:1365] Could not parse the xml
Entity: line 211: parser error : Opening and ending tag mismatch: physical line 206 and include
</include>
^
Entity: line 212: parser error : Opening and ending tag mismatch: world line 3 and physical
</model:physical>
^
Entity: line 215: parser error : Extra content at the end of the document
<model:physical name="desk5_model">
^
Error [parser_deprecated.cc:1307] Could not parse the xml
Error [parser.cc:263] parse as old deprecated model file failed.
Error [Server.cc:196] Unable to read sdf file[/opt/ros/fuerte/stacks/simulator_gazebo/gazebo_worlds/worlds/simple_office_table.world]
[gazebo-2] process has died [pid 9413, exit code 255, cmd /opt/ros/fuerte/stacks/simulator_gazebo/gazebo/scripts/gazebo /opt/ros/fuerte/stacks/simulator_gazebo/gazebo_worlds/worlds/simple_office_table.world __name:=gazebo __log:=/home/nirala/.ros/log/a44e752a-fdd7-11e1-b21f-7071bc63a65c/gazebo-2.log].
log file: /home/nirala/.ros/log/a44e752a-fdd7-11e1-b21f-7071bc63a65c/gazebo-2*.log
^C[gazebo_gui-3] killing on exit
Error [ConnectionManager.cc:89] Connection Manager is not running
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
apart from the harmless AttributeError as discussed at : http://answers.ros.org/question/34304/exception-attributeerror-when-starting-roscore/ A similar error is also posted at : http://answers.ros.org/question/29622/import-dae-gazebo-100-rc2/ Am I missing some small configuration or tags somewhere? Kindly help me out. |
| 2014-04-20 13:06:43 -0500 | marked best answer | Making revolute joint stay at rest, if no effort/wrench is applied Hi, As posted at : http://answers.ros.org/question/12965/spawn-urdf-joint-stiffness/ the solution for keeping a revolute joint fixed seems to be writing a controller for it. However a controller would be required if it is for a robot (and then I can control it with code directly). However, if the joint is associated with an object (like door, say of a closet) and if it is to be manipulated by robot actuators then I guess controller is not needed (for the door). Or do I need to write the controller in this case also? But now, the door is moving slowly from lower angle to upper and vice versa, w/o any outer effort. How can I stop this? Specifically, I have created URDF for a closet. It has two doors with revolute-joint. The joint description is (for left joint): </link> I added the joint as <joint name="L_door_joint" type="revolute">
<origin rpy="0 0 0" xyz="-0.48875 0 0.6"/>
<axis xyz="0 0 1"/>
<limit effort="1000" lower="-1.67075" upper="0.1" velocity="10"/>
<safety_controller k_position="100.0" k_velocity="10.0" soft_lower_limit="1.57075" soft_upper_limit="0.0"/>
<dynamics damping="100" friction="0.0"/>
<parent link="L_side"/>
<child link="L_door"/>
</joint>
I also added following lines from the urdf of door from(changing the link names etc) http://ros.org/wiki/pr2_simulator/Tutorials/PR2OpenDoor,(I am not sure about the functionality of these tags though, they do not seem to have any effect). </gazebo> Any suggestions/links is greatly appreciated. |
| 2014-04-20 13:05:35 -0500 | marked best answer | URDF tags for creating objects involving curved surfaces and body parts Hi, I am trying to create objects for indoor environment. (Though I am hoping that these objects must be already created by someone, I asked that at: http://answers.ros.org/question/42435/pointers-to-office-and-home-environment-in-gazebo/) I created a chair in urdf. The chair looks like:-
The back-support of the chair has three cylinders and all are straight. However I need them to be a bit circular. How to achieve that? I couldn't find any useful tags at : http://www.ros.org/wiki/urdf/XML Where can I find all the tags interpreted by urdf. I also saw the urdf of door from http://ros.org/wiki/pr2_simulator/Tutorials/PR2OpenDoor, It contains a door.urdf, which has tags like:- <gazebo reference="door_link">
<latchJoint>handle_joint</latchJoint>
<latchAngle>-1.57</latchAngle>
<doorClosedAngle>0.0</doorClosedAngle>
<latchKp>200.0</latchKp>
<latchKd>0.0</latchKd>
<latchFMax>1000.0</latchFMax>
</gazebo>
I guess these tags (latchAngle, doorClosedAngle) are defining the two states of the door (open/close). Are these tags custom made (I didn't went through the entire code as door opening is not supported after diamondback) or are standard? Any pointers/suggestions/links/comment is greatly appreciated. Also is there any tool which I can use to create object quickly? Edit 1
@Adolfo Rodriguez T:-
(I have replaced spaces with _ in file and folder names, hope thats not an issue). My .model file (which does not work at all):- <model name="Nelson_Swag_Leg_Chair" static="true">
<link name="Nelson_Swag_Leg_Chair">
<origin pose="0 0 0 0 0 0"/>
<collision>
<geometry>
<mesh filename="/home/nirala/ros_workspace/myWorld/world/object/Nelson_Swag_Leg_Chair/models/Nelson_Swag_Leg_Chair.dae" scale="1 1 1"/>
</geometry>
</collision>
<visual>
<geometry>
<mesh filename="package://myWorld/world/object/Nelson_Swag_Leg_Chair/models/Nelson_Swag_Leg_Chair.dae" scale="1 1 1"/>
</geometry>
</visual>
</link>
</model>
and launch file as:- <launch> <param name="Nelson_Swag_Leg_Chair_p" textfile="$(find myWorld)/world/object/Nelson_Swag_Leg_Chair/Nelson_Swag_Leg_Chair.model" /> <node name="Nelson_Swag_Leg_Chair" pkg="gazebo" type="spawn_model" args="-gazebo -param Nelson_Swag_Leg_Chair_p -z 0.1 -y 2 x -x 2 -model Nelson_Swag_Leg_Chair" respawn="false" output="screen"/> </launch> But this gave me error as:- [ERROR] [1346749562.693001448, 982.362000000]: GazeboROSNode SpawnModel Failure: input model_xml not Gazebo XML, or cannot be converted to Gazebo XML Then I tried to make an urdf file as:- <?xml version="1.0"?>
<robot name="Nelson_Swag_Leg_Chair_U">
<link name="Nelson_Swag_Leg_Chair_n">
<visual>
<origin rpy="0 0 0" xyz="0.09137 0.00495 1"/>
<geometry>
<mesh filename="package://myWorld/world/object/Nelson_Swag_Leg_Chair/models/Nelson_Swag_Leg_Chair.dae" scale = ".1 .1 .1"/>
</geometry>
</visual>
<collision>
<geometry>
<mesh filename="package://myWorld/world/object/Nelson_Swag_Leg_Chair/models/Nelson_Swag_Leg_Chair.dae" scale = ".1 .1 .1"/>
</geometry>
<origin rpy="0 ... (more) |
| 2014-04-20 13:01:40 -0500 | marked best answer | Might be a small bug in moving the arm tutorial, how to correct such issues? I am using electric on Ubuntu 11.10 While going through the tutorial at : http://www.ros.org/wiki/pr2_controllers/Tutorials/Moving%20the%20arm%20through%20a%20Cartesian%20pose%20trajectory I was unable to run it using the python client, But directly using the command line as explained worked nicely. I got This seemed like a straight forward issue and must be faced by other people as well, but I couldn't find the answer to exact error. Luckily when I googled with 'roslib.msg.Header()' and in google search page saw #4784 (actionlib uses roslib.msg.Header instead of rospy.Header ............. I simply changed the to and it worked!!!! My question is : Is it specific to electric? Or only I am facing this? Or is it a valid bug? On my machine at /opt/ros/electric/ros/core/roslib/src/roslib/ there is no msg.py file but msgs.py and when I changed msg to msgs I got error on Header(). However if this is a valid bug (though small one then) how could it be corrected on the tutorial? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.