The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-11-01 00:50:52 -0500 | received badge | ● Critic (source) |
| 2020-10-31 10:22:42 -0500 | answered a question | get a gazebo topic and publish in a ros topic For my understanding you would like to republish a topic in Gazebo to ROS. If this is what you are trying to do, see thi |
| 2020-05-14 13:21:59 -0500 | received badge | ● Famous Question (source) |
| 2020-03-12 21:32:45 -0500 | received badge | ● Nice Answer (source) |
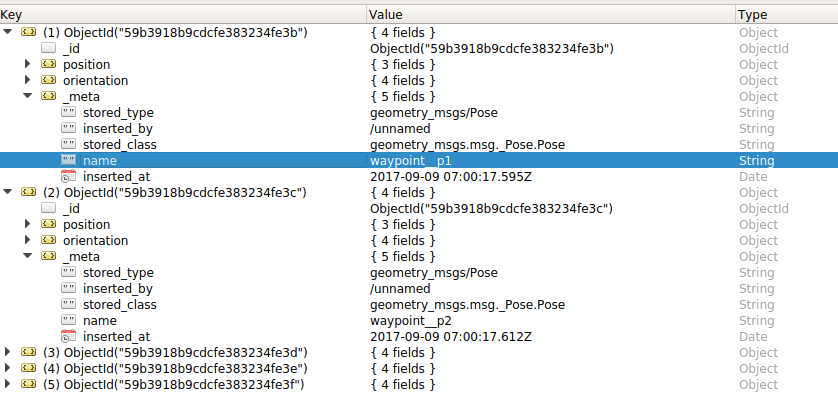
| 2019-05-20 02:18:35 -0500 | marked best answer | Get information from 'mongo_store' using partial information of '_meta.name' field I am working with 'ROSPlan' and 'rosplan_interface' packages, and I am trying to get an object of the 'mongodb_store' using only its name, that is stored in an predefined field named 'name'. Please, see below the Mongo DB.
Although in 'name' is written 'waypoint_p1', the name is only 'p1' while 'waypoint' is the type. So, I would like to obtain all the information of the object passing only 'p1' to the query method. I have tried several approaches to achieve what I want but no one works. In below code the query works but it is not what I wanted as I am already specifying the type, I only want to specify the name of the object. 'kbi.db' is an instance of 'MessageStoreProxy' from 'mongodb_store.message_store'. This code is same as execute the following command in Mongo DB using RoboMongo: Following one is returning an empty result. What I am trying is to pass a regular expression that will be used by Mongo DB to obtain the information I am requesting, this information means all names that contain 'p1'. The command executed in RoboMongo for doing the query I want is: Do you know what I am doing wrong? Or do you have a way to solve my problem? Thanks. |
| 2019-01-13 02:11:25 -0500 | received badge | ● Enthusiast |
| 2018-07-27 06:07:32 -0500 | received badge | ● Notable Question (source) |
| 2017-10-28 10:21:41 -0500 | received badge | ● Popular Question (source) |
| 2017-09-10 02:54:39 -0500 | edited answer | Get information from 'mongo_store' using partial information of '_meta.name' field I have found a workaround for my problem, so I am answering my own question. Maybe this workaround could be useful to so |
| 2017-09-10 02:40:36 -0500 | edited answer | Get information from 'mongo_store' using partial information of '_meta.name' field I have found a workaround for my problem, so I am answering my own question. Maybe this workaround could be useful to so |
| 2017-09-10 02:38:23 -0500 | answered a question | Get information from 'mongo_store' using partial information of '_meta.name' field I have found a workaround for my problem, so I am answering my own question. Maybe this workaround could be useful to so |
| 2017-09-09 11:52:08 -0500 | received badge | ● Famous Question (source) |
| 2017-09-09 06:16:00 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field Get information from 'mongo_store' using partial information of '_meta.name' field I am working with 'ROSPlan' and 'rosp |
| 2017-09-09 06:14:56 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field Get information from 'mongo_store' using partial information of '_meta.name' field I am working with 'ROSPlan' and 'rosp |
| 2017-09-09 06:09:32 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field Get information from 'mongo_store' using partial information of '_meta.name' field I am working with 'ROSPlan' and 'rosp |
| 2017-09-09 06:09:15 -0500 | received badge | ● Associate Editor (source) |
| 2017-09-09 06:09:15 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field Get information from 'mongo_store' using partial information of '_meta.name' field I am working with 'ROSPlan' and 'rosp |
| 2017-09-09 06:08:43 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field Get information from 'mongo_store' using partial information of '_meta.name' field I am working with 'ROSPlan' and 'rosp |
| 2017-09-09 06:08:19 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field Get information from 'mongo_store' using partial information of '_meta.name' field I am working with 'ROSPlan' and 'rosp |
| 2017-09-09 04:27:27 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field How to get information from mongo_store using "_meta.name" I am working with 'ROSPlan' and 'rosplan_interface' packages, |
| 2017-09-09 04:26:29 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field How to get information from mongo_store using "_meta.name" I am working with 'ROSPlan' and 'rosplan_interface' packages, |
| 2017-09-09 04:25:24 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field How to get information from mongo_store using "_meta.name" I am working with 'ROSPlan' and 'rosplan_interface' packages, |
| 2017-09-09 04:23:42 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field How to get information from mongo_store using "_meta.name" I am working with 'ROSPlan' and 'rosplan_interface' packages, |
| 2017-09-09 04:23:15 -0500 | edited question | Get information from 'mongo_store' using partial information of '_meta.name' field How to get information from mongo_store using "_meta.name" I am working with 'ROSPlan' and 'rosplan_interface' packages, |
| 2017-09-09 04:22:41 -0500 | asked a question | Get information from 'mongo_store' using partial information of '_meta.name' field How to get information from mongo_store using "_meta.name" I am working with 'ROSPlan' and 'rosplan_interface' packages, |
| 2017-04-09 08:34:22 -0500 | received badge | ● Notable Question (source) |
| 2017-04-05 06:07:17 -0500 | answered a question | Assign value of a rosparam to a node param in a launch file I found a workaround for the problem. I created a python script named as "set_components_config.py", it is responsible of mapping the global parameters to the parameters of each component (e.g. rosplan_scene_database). And this script is called by the launch file after loading the global parameters and before starting the nodes that use them. |
| 2017-04-05 06:01:20 -0500 | commented question | Assign value of a rosparam to a node param in a launch file Thanks for your answer. Yes, but I don't know how to remove them. Therefore, I following a workaround, I map the parameters using a python script that I call inside my launch file. |
| 2017-04-05 04:06:28 -0500 | received badge | ● Popular Question (source) |
| 2017-04-02 06:10:31 -0500 | asked a question | Assign value of a rosparam to a node param in a launch file I would like to configure the "mongodb_store" as it uses for database_path a directory path that it is stored in a parameter of the ROS server. The path is stored as "/rosplan/database_path", see below. To achieve this I am calling "rosparama get /rosplan/data_path" in the "command" keyword of "database_path" param" required by "mongodb_store". It does not work, and output of the console is: In fact, when I get the information of "/rosplan/database_path" and "/rosplan_scene_database/database_path" there are some extra spaces in the second one. Do you know why this is happening? And how I could solve this situation? I am using ROS Indigo running on Ubuntu 14.04 LTS. Thanks in advance. |
| 2016-03-11 08:33:27 -0500 | received badge | ● Good Question (source) |
| 2014-01-28 17:30:42 -0500 | marked best answer | ROS over QNX Has anyone tried to use ROS over QNX? I would like to use ROS topics to export data (i.e. joints) from an existing system that runs over QNX. |
| 2014-01-28 17:28:12 -0500 | marked best answer | How to - simple process module in CRAM I am learning about CRAM designators and process modules. At this moment I am trying to create a stupid process module to check if I understand how the system works. I am following http://ros.org/wiki/cram_process_modules (this tutorial) but I have not succeeded. When I execute the following code: An error is raised in SLIME: I don't understand why this is happening. "Navigation" is the name of the process module I am trying to define, am I right? Therefore, I can understand an error raised because "execute-navigation-action" is not defined but not in "navigation". What I am missing? Thanks in advance. |
| 2014-01-28 17:27:26 -0500 | marked best answer | Designators in CRAM framework I have just finished reading CRAM core and KnowRob, and I have an overview of the system at this moment. I have read the following information:
However, I still do not understand "designators" in CRAM. How they work? Do you know where I can find more information about them? "Designators" are the module most interesting for me. Thanks. |
| 2013-08-01 04:13:33 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.