
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2014-07-28 13:28:37 -0500 | received badge | ● Nice Question (source) |
| 2014-04-01 03:22:40 -0500 | received badge | ● Notable Question (source) |
| 2014-04-01 03:22:40 -0500 | received badge | ● Popular Question (source) |
| 2014-04-01 03:22:40 -0500 | received badge | ● Famous Question (source) |
| 2014-01-28 17:22:40 -0500 | marked best answer | Export format from ArchiCAD import into Gazebo Hello. I would like to know in which format should I export a 3D work created in ArhiCAD in order to import it into Gazebo. Thank you. |
| 2014-01-28 17:22:38 -0500 | marked best answer | Transparent cubes in RViz Hello. I would like to visualize a cube in order to make visible only the edges of the cube the inner area to not be filled with any color. Thank you. |
| 2014-01-28 17:22:38 -0500 | marked best answer | Combine pcl_ros with standalone pcl Hello. I would like to send to RViz my PointCloud2 data yet I'm running the standalone PCL. It would be possible to use the features from both pcl's in the same time? In case of the usage of standalone PCL there is no need to specify the dependency in the manifest.xml, how it would be in case if both packages installed? Thank you. |
| 2014-01-28 17:22:11 -0500 | marked best answer | Cell decomposition Hello, I'm using probabilistic cell decomposition(2D&3D) for a path planning algorithm. It is possible to show the decomposition in RViz, which would be the solution programatically? - the cells dimensions can variate. |
| 2014-01-28 17:22:10 -0500 | marked best answer | Parsing 3D txt data set Hello!I've obtained a 3D data set and its stored in a txt file, the question would be how it is possible to load it into RViz? Thank you. Im trying to build up a PointCloud message, the 3D data set is loaded from a vector, im stucked how to insert the values of pC into cloud.channels.values. In this way there is no msg reeived in RViz. |
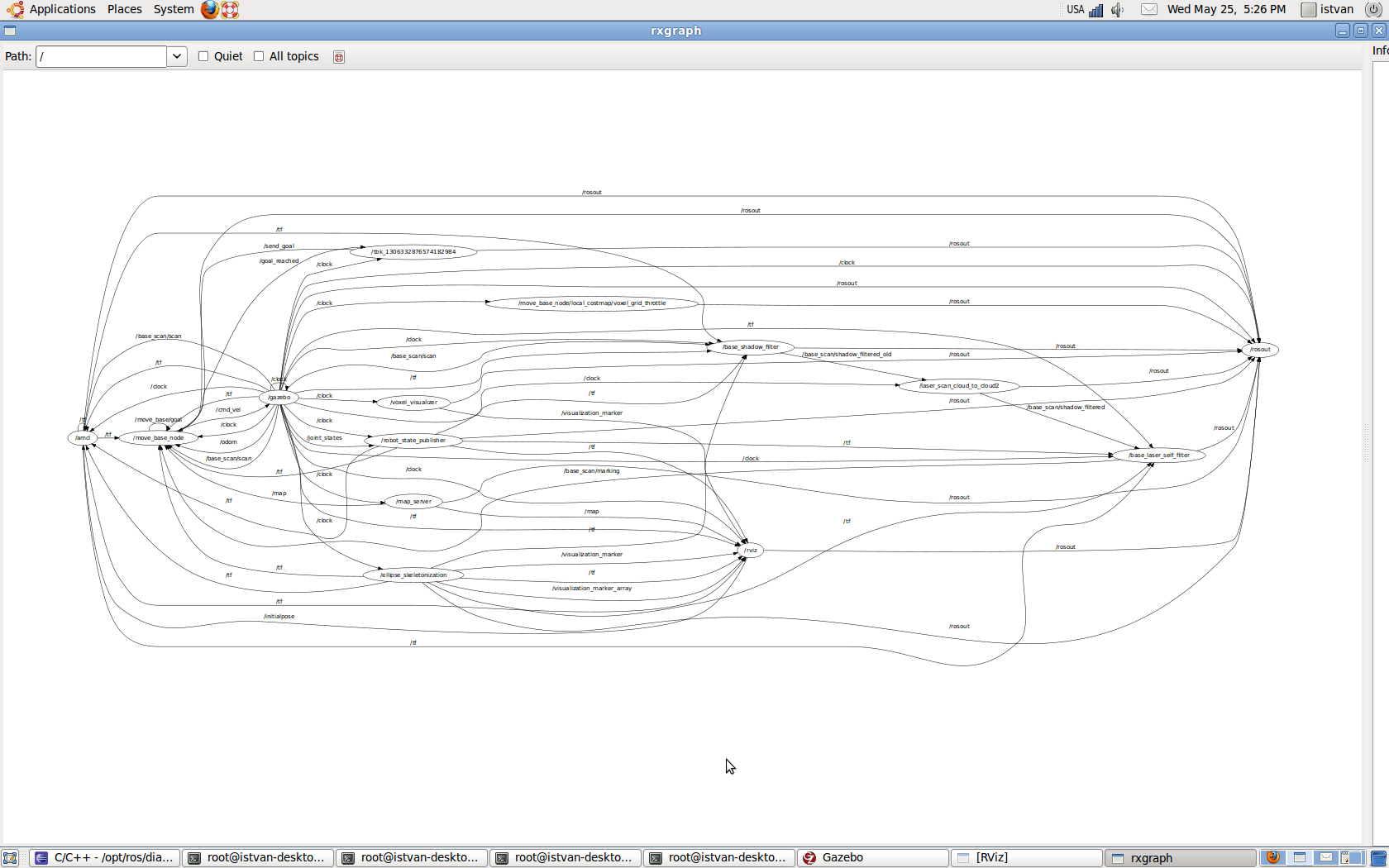
| 2014-01-28 17:22:07 -0500 | marked best answer | Sensor out of bounds Hello. I've attached the result of the rxgraph. I've created a node which is sending commands to the move_base_node, my map is a static one published by map_server, I'm using amcl to obtain the map->odom transform. My configure files are ok, in the global_costmap my map is set to static. I'm getting the following error.
Thank you! Gazebo_robot.png,amcl_outofbounds.png |
| 2014-01-28 17:22:07 -0500 | marked best answer | robot_description synchronization gazebo RViz My objective is to synchronize the position of the robot in Gazebo and RViz. In Gazebo the robot model is launched into a position different than the origin while in RViz the position is set from the transform odom->base_footprint sent by gazebo, but the robot didn't moved from it's initial position hence is clear why im getting (0,0). How to load the Robot Model into RViz in a specified location.Thank you! |
| 2014-01-28 17:21:53 -0500 | marked best answer | Loading 2D raw data Hello, I've obtained a 2D map from another development environment, how could I load/display/manipulate (in gazebo/rviz) this set of 2D points. Thank you. |
| 2014-01-28 17:21:38 -0500 | marked best answer | slam gmapping Hello, I'm trying to build a map from a bag file. In rxbag I've checked the bag file and there is /pose instead of /odom. How to do the transforms? Thank you! |
| 2014-01-05 11:15:44 -0500 | received badge | ● Famous Question (source) |
| 2014-01-05 11:15:44 -0500 | received badge | ● Notable Question (source) |
| 2014-01-05 11:15:44 -0500 | received badge | ● Popular Question (source) |
| 2013-11-06 06:26:12 -0500 | marked best answer | Loading mesh into RViz Hello. I would like to load into RVIz a 3D CAD model. The work was saved into .pnl format and afterwords converted to .3ds, .dwg, .dxf formats. The objective is to get .stl, .mesh and .dae formats in order to visualize the 3D environment in RViz. Using MeshLab I've loaded the .3ds format and convert it into .stl and .dae. Loading these latter files into MeshLab works correctly the environment can be fully observable but loading the files into RViz is showing just a few objects from the environments loading the Collada file and a white mesh loading the .stl file. Could somebody give me a hint of another 3D free converter, or if I would upload the file to convert it to one the above mentioned formats. Thank you. |
| 2013-06-28 20:22:57 -0500 | marked best answer | Problem running stage navigation tutorial Hello , I'm trying to execute the code from "Tutorials/stage and navigation stack", roslaunch awesomeros robot.launch started roslaunch server http://istvan-System-Product-Name:56169/ SUMMARYPARAMETERS * /use_sim_time * /move_base_node/global_costmap/observation_sources * /amcl/gui_publish_rate * /move_base_node/local_costmap/origin_y * /move_base_node/local_costmap/origin_x * /move_base_node/local_costmap/update_frequency * /move_base_node/local_costmap/origin_z * /move_base_node/global_costmap/base_scan/max_obstacle_height * /move_base_node/global_costmap/origin_z * /move_base_node/local_costmap/base_scan/marking * /move_base_node/local_costmap/observation_sources * /move_base_node/TrajectoryPlannerROS/vx_samples * /move_base_node/local_costmap/base_scan/raytrace_range * /amcl/recovery_alpha_slow * /move_base_node/local_costmap/base_scan/clearing * /move_base_node/global_costmap/mark_threshold * /amcl/laser_z_short * /move_base_node/local_costmap/max_obstacle_height * /move_base_node/TrajectoryPlannerROS/sim_time * /move_base_node/TrajectoryPlannerROS/max_vel_x * /amcl/laser_z_max * /amcl/laser_z_rand * /move_base_node/TrajectoryPlannerROS/acc_lim_th * /move_base_node/global_costmap/base_scan/observation_persistence * /move_base_node/local_costmap/inflation_radius * /move_base_node/global_costmap/map_type * /move_base_node/TrajectoryPlannerROS/acc_lim_y * /move_base_node/TrajectoryPlannerROS/acc_lim_x * /move_base_node/global_costmap/static_map * /move_base_node/global_costmap/base_scan/data_type * /move_base_node/local_costmap/base_scan/min_obstacle_height * /move_base_node/global_costmap/footprint * /amcl/laser_lambda_short * /move_base_node/TrajectoryPlannerROS/sim_granularity * /move_base_node/local_costmap/base_scan/observation_persistence * /amcl/laser_max_beams * /move_base_node/local_costmap/z_resolution * /move_base_node/TrajectoryPlannerROS/min_vel_x * /move_base_node/local_costmap/map_type * /move_base_node/global_costmap/lethal_cost_threshold * /move_base_node/TrajectoryPlannerROS/heading_lookahead * /amcl/odom_model_type * /amcl/laser_sigma_hit * /amcl/recovery_alpha_fast * /move_base_node/global_costmap/inflation_radius * /move_base_node/global_costmap/z_voxels * /move_base_node/local_costmap/base_scan/data_type * /move_base_node/local_costmap/transform_tolerance * /move_base_node/global_costmap/robot_base_frame * /move_base_node/global_costmap/transform_tolerance * /move_base_node/local_costmap/global_frame * /move_base_node/local_costmap/rolling_window * /move_base_node/TrajectoryPlannerROS/dwa * /amcl/odom_alpha5 * /amcl/odom_alpha1 * /amcl/odom_alpha2 * /amcl/odom_alpha3 * /amcl/odom_alpha4 * /move_base_node/local_costmap/width * /stageros/base_watchdog_timeout * /move_base_node/global_costmap/base_scan/clearing * /move_base_node/local_costmap/publish_frequency * /amcl/max_particles * /move_base_node/local_costmap/height * /move_base_node/local_costmap/base_scan/obstacle_range * /move_base_node/local_costmap/static_map * /move_base_node/global_costmap/cost_scaling_factor * /move_base_node/TrajectoryPlannerROS/yaw_goal_tolerance * /amcl/min_particles * /move_base_node/global_costmap/global_frame * /move_base_node/controller_frequency * /move_base_node/local_costmap/cost_scaling_factor * /move_base_node/TrajectoryPlannerROS/max_rotational_vel * /amcl/laser_model_type * /move_base_node/global_costmap/publish_frequency * /move_base_node/TrajectoryPlannerROS/goal_distance_bias * /amcl/transform_tolerance * /amcl/kld_err * /amcl/resample_interval * /move_base_node/global_costmap/update_frequency * /move_base_node/global_costmap/base_scan/obstacle_range * /move_base_node/local_costmap/mark_threshold * /move_base_node/local_costmap/base_scan/max_obstacle_height * /move_base_node/TrajectoryPlannerROS/vtheta_samples * /move_base_node/local_costmap/robot_base_frame * /move_base_node/local_costmap/lethal_cost_threshold * /move_base_node/global_costmap/z_resolution * /move_base_node/TrajectoryPlannerROS/holonomic_robot * /move_base_node/local_costmap/footprint * /move_base_node/global_costmap/rolling_window * /amcl/laser_z_hit * /move_base_node/global_costmap/base_scan/expected_update_rate * /move_base_node/global_costmap/base_scan/raytrace_range * /amcl/update_min_d * /move_base_node/TrajectoryPlannerROS/min_in_place_rotational_vel * /move_base_node/global_costmap/unknown_threshold * /move_base_node/TrajectoryPlannerROS/path_distance_bias * /move_base_node/global_costmap/max_obstacle_height * /amcl/odom_frame_id * /move_base_node/local_costmap/unknown_threshold * /move_base_node/global_costmap/base_scan/marking * /move_base_node/NavfnROS/allow_unknown * /move_base_node/global_costmap/base_scan/min_obstacle_height * /move_base_node/local_costmap/z_voxels * /move_base_node/local_costmap/resolution * /move_base_node/footprint_padding * /move_base_node/TrajectoryPlannerROS/backup_vel * /move_base_node/TrajectoryPlannerROS/oscillation_reset_dist * /amcl/kld_z * /move_base_node/global_costmap/footprint_padding * /move_base_node/local_costmap/base_scan/expected_update_rate * /move_base_node/local_costmap/footprint_padding * /amcl/update_min_a * /amcl/laser_likelihood_max_dist * /move_base_node/local_costmap/publish_voxel_map * /amcl/initial_pose_x * /amcl/initial_pose_y * /move_base_node/TrajectoryPlannerROS/occdist_scale * /move_base_node/TrajectoryPlannerROS/xy_goal_tolerance NODES / move_base_node (move_base/move_base) map_server (map_server/map_server) stageros (stage/stageros) amcl (amcl/amcl) /local_costmap/ voxel_grid_throttle (topic_tools/throttle) ROS_MASTER_URI=http://istvan-System-Product-Name:11311/ core service [/rosout] found process[voxel_grid_throttle-1]: started with pid [10804] process[move_base_node-2]: started with pid [10805] process[map_server-3]: started with pid [10806] process[stageros-4]: started with pid [10807] process[amcl-5]: started with pid [10814] err: /opt/ros/cturtle/stacks/ros_tutorials/awesomeros/world/willow.world:21 : syntax error 2 (/tmp/buildd/ros-cturtle-simulator-stage-1.2.4/debian/ros-cturtle-simulator-stage/opt/ros/cturtle/stacks/simulator_stage/stage/build/Stage-3.2.2-Source/libstage/worldfile.cc ParseTokenWord) Thank you. |
| 2012-10-16 01:43:27 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}