The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-09-15 04:54:34 -0500 | received badge | ● Notable Question (source) |
| 2023-09-15 04:54:34 -0500 | received badge | ● Popular Question (source) |
| 2023-09-15 04:54:34 -0500 | received badge | ● Famous Question (source) |
| 2022-06-17 02:41:33 -0500 | received badge | ● Good Answer (source) |
| 2021-04-14 09:46:48 -0500 | marked best answer | Synchronize headerless messages Hi, I want to synchronize messages without headers. I know synchronization can be done with My goal is to receive two angle positions from two motors that actuate the same joint, in order to send a sensor_msgs/JointState message regarding the entire joint. Best regards, Hans |
| 2020-11-24 02:47:20 -0500 | received badge | ● Great Question (source) |
| 2020-04-20 02:48:01 -0500 | received badge | ● Notable Question (source) |
| 2020-04-20 02:48:01 -0500 | received badge | ● Popular Question (source) |
| 2020-04-20 02:48:01 -0500 | received badge | ● Famous Question (source) |
| 2019-04-02 04:27:28 -0500 | received badge | ● Great Question (source) |
| 2018-08-21 08:44:09 -0500 | received badge | ● Nice Question (source) |
| 2018-07-16 17:49:57 -0500 | received badge | ● Famous Question (source) |
| 2017-06-26 06:43:52 -0500 | received badge | ● Good Question (source) |
| 2017-06-19 14:13:37 -0500 | marked best answer | Mocking in ROS? Hey, I'm creating tests for my project and I was wondering, is there a mocking package in ROS? I was using gtest for the tests itself so I was expecting gmock, or googlemock, to be in ROS too but I couldn't find it.. Should I just use gmock as if it was a regular gtest, without ROS? Thanks in advance. |
| 2017-04-29 18:20:16 -0500 | received badge | ● Nice Question (source) |
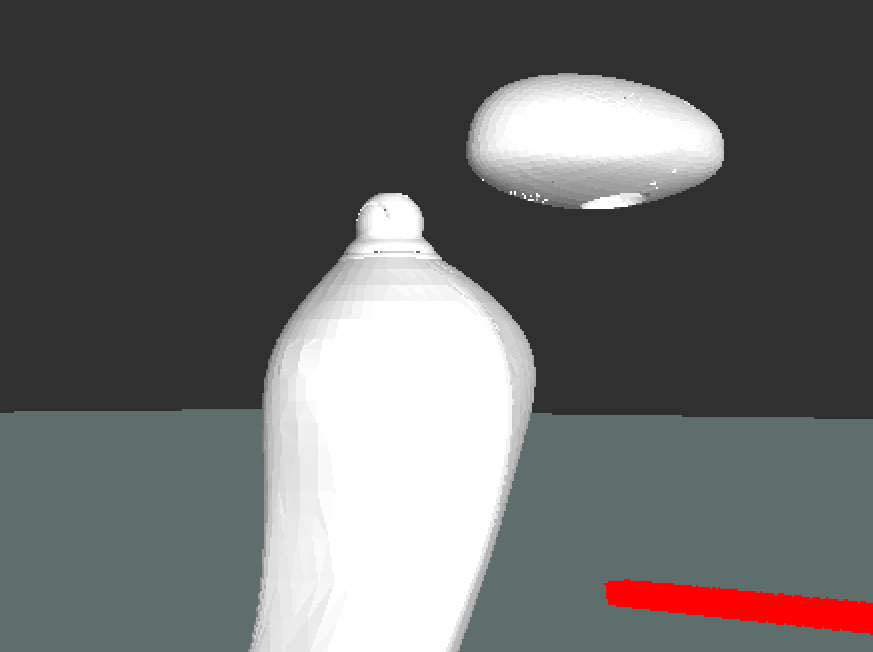
| 2017-04-20 17:37:10 -0500 | marked best answer | Visual robot model dismembered It sounds horrid, and that is exactly what it looks like :p I have a visual robot model, now only consisting of a base and a head. Both are separate links and they have their separate mesh. The head is attached through continuous joints in the neck. If I now drive with the robot, the base will move seemingly smooth, however the head will detach from its link occasionally and drag behind a bit. See the picture for more information. If I change the joints to fixed joints, this does not happen. If I decrease the refresh rate of the joint publisher node, it gets worse, if I increase the rate it gets better, but you still notice some detachments on occasion. Is there anything I can do about this?
Best regards, Hans |
| 2016-10-26 20:22:05 -0500 | received badge | ● Nice Question (source) |
| 2016-05-09 06:39:17 -0500 | marked best answer | First compile with messages, messages not found Hello, I am using a catkin workspace with a package that only contains messages. If I build the workspace for the first time (ie. delete the devel / build folders) it seems like it wants to compile code that depends on these messages, before it has build these messages. This results in an error saying it can't find the message include file. If I then try to compile it again it works fine, because then the messages are probably generated. In packages that depend on the messages I add this in the CMakeLists.txt: But that doesn't seem to have any effect. It is not a big deal since I can just compile it twice the first time, but I would like to fix it still. Regards, Hans |
| 2016-05-08 14:58:49 -0500 | marked best answer | LaserScan time_increment Hey, Following a previous question I was wondering what the time_increment in the LaserScan message is for. The LaserScan.msg says: However isn't this nothing more than scan_time / ranges.size() ? Seems a bit redundant? In addition, we had this value filled in and it for some reason caused our messages to receive a noticeable delay in rviz. Setting it back to 0 'fixed' this issue. Best regards, Hans |
| 2016-05-08 14:58:44 -0500 | marked best answer | robot_pose_ekf output to fake_localization Hey, I have robot_pose_ekf running and accepting wheel odometry and imu data and it is publishing on /robot_pose_ekf/odom just fine. I was wondering however what the idea of this output was, I was expecting nav_msgs/Odometry as output, because fake_localization takes this as input. Am I conceptually doing something wrong here? Best regards, Hans |
| 2016-05-01 22:45:23 -0500 | marked best answer | Linking dependencies on OSX Hey, I have been attempting to get ROS to work on OSX and am stuck when I try to link an executable with a dependency. I tried linking against yaml-cpp and tinyxml, both installed and linked according to homebrew, but I get the following message: Executing : Gives me : Doesn't that mean rosmake should be able to find it? For the record, I am linking in my CMakeLists.txt like this: What am I doing wrong? |
| 2016-05-01 22:45:19 -0500 | received badge | ● Nice Question (source) |
| 2016-04-20 17:07:05 -0500 | received badge | ● Nice Question (source) |
| 2015-11-16 01:32:52 -0500 | marked best answer | ROS install from src fails to find rosinstall script Hey, It seems like something got deleted from http://packages.ros.org/ The installation from source tutorials are saying to execute the command : However http://packages.ros.org/web no longer exists and thus this command fails. Is there a backup I can use somewhere? |
| 2015-11-16 01:32:15 -0500 | received badge | ● Famous Question (source) |
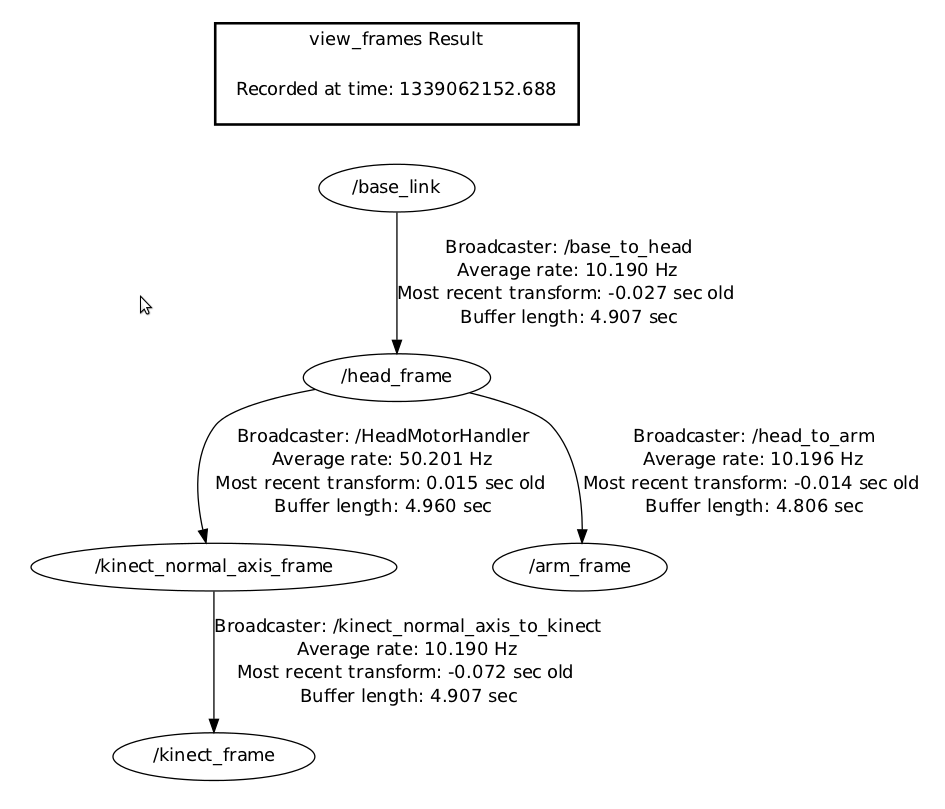
| 2015-11-07 15:57:46 -0500 | marked best answer | Using tf to transform a point Hello, I am trying to transform a point from one frame (/kinect_frame) to another (/base_link). This is the pdf I get from 'rosrun tf view_frames' :
but still when I try to transform my point using a tf::TransformListener and tf::TransformListener::transformPoint like this : mTransformListener.transformPoint("/base_link", qc.response.points[0], result); I get the following error : But there is a link visible between kinect_frame and base_link, what am I doing wrong ? |
| 2015-11-03 17:26:44 -0500 | marked best answer | rviz doesn't show custom plugin Hey, I created a plugin to show a mesh in rviz (basically an adaptation of the Polygon display). I had previously changed the source of the Polygon display to accept my message and display it as a mesh, this works fine. Then I wanted to export this plugin to my own package, however rviz doesn't seem to recognize it. According to the tutorial, common problems are : -Not having a plugin_description.xml (I have this located in the same package as the new plugin) -Not exporting it in a package.xml file (I export it as follows: -Not properly referencing the library file from plugin_description.xml (I reference the path as I reference the class as: Which is inside the mesh_tools package. The class is called mesh::MeshDisplay and as is done for rviz::Polygon display, it has rviz::Display as base class. When I make everything, I do indeed get a devel/lib/librviz_plugin.so. The plugin_description.xml is not copied to the devel folder however. If I do catkin_make_isolated --install it will get copied, but rviz still can't see the display. What can I do to debug this further? By the way, I am on Indigo with Ubuntu 14.04. Best regards, Hans |
| 2015-10-30 17:51:37 -0500 | received badge | ● Famous Question (source) |
| 2015-10-30 17:51:37 -0500 | received badge | ● Notable Question (source) |
| 2015-10-16 05:20:28 -0500 | received badge | ● Famous Question (source) |
| 2015-09-23 14:51:04 -0500 | marked best answer | ps3joy slow output Hi all, I am using p3joy to get feedback from my ps3 controller on an Odroid u2 running Ubuntu 12.10, however it is incredibly slow. There appears to be a delay of a few seconds before messages arrive regarding changes of the controller. evtest and jstest give me the same kind of delay. I 'debugged' ps3joy_node.py and it does seem like its update function is called often enough, where could this delay then be coming from? In addition, I noticed that if I don't move the controller (this also happens on a laptop with Ubuntu), no events get sent. For example if I keep the controller laying still and press the X button, no messages/events are being sent. If I then move the controller slightly, I get the message/event. Any suggestions? |
| 2015-09-22 08:48:01 -0500 | commented answer | "fatal error: 'QMetaType' file not found" when building ROS Indigo on OS X 10.10.3 Worked for me. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.