
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2014-03-25 17:21:33 -0500 | received badge | ● Great Question (source) |
| 2014-01-28 17:22:13 -0500 | marked best answer | OpenCV can't be used in ROS I have been trouble by opencv problems. I have planed to transport my windows's code into ROS, which I have tested by local video files. I found that ROS doesn't support local video files, until ffmpeg has been installed. And Checking my ubuntu that it had been installed, I find ROS didn't support local video files neither. I reinstall my ffmpeg and my opencv2.2, which I find my ROS doesn't support opencv unluckily. I test my older packages, such as gencam_cu. It all doesn't work, while it will works very well without opencv, like usb_cam. I think my ROS system maybe disorder. So I reinstall my ROS refer to ROS. But also it doesn't work. Especially, when uses "cvCaptureFromCAM" it can't get frames information. Try to find the reason for this problem, but I am so disappointed. I have been bored for many days. Could some one give me helps? Given a example, codes below And it will show the results that: 0 Error on cvCaptureFromCAM Segmentation fault More, I find my problems are similar with dkst. I try all my methods as possible as I can think,but I did solve these problems. So call for help here Thanks. |
| 2014-01-28 17:22:03 -0500 | marked best answer | Cannot get the left image with bumblebee2 camera by "bumblebee1394" package Hi, There some confusion for me by bumblebee1394, that i always cannot get the left image. I try where there always get the same image which is published by right camera. And I read the code carefully that i cannot get any idea. Have somebody faced this problem by bumblebee2 camera? and for more, when I command which I only get the mono image, could somebody explain to me? |
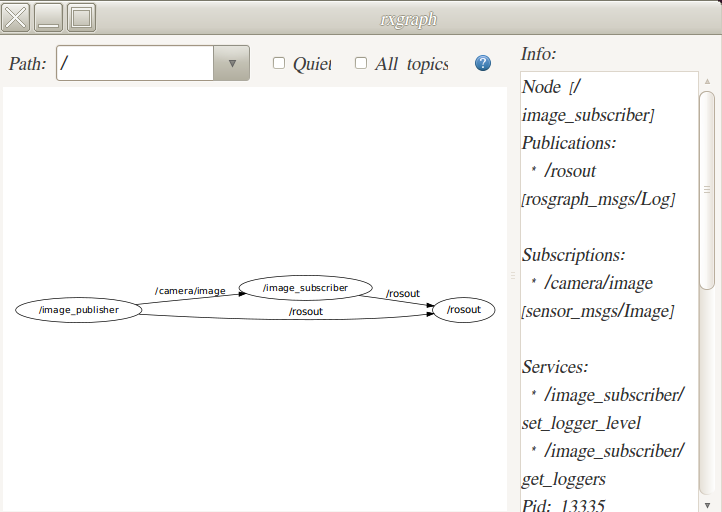
| 2014-01-28 17:21:45 -0500 | marked best answer | An error for connecting two different packages Hi, there some problems for connecting two packages. That, i learn learning_image_transport, and i create anther package named "subscriber" for subscribing the image which "learning_image_transport" published. And the code of "subscriber" packages, /src/subscriber.cpp: for checking my rxgraph: that "image_subscriver" node has already connected "image_publisher" node. But why it does not preform the image? PS: my rostopic list as follow: /camera/image /camera/image/compressed /camera/image/compressed/parameter_descriptions /camera/image/compressed/parameter_updates /camera/image/theora /camera/image/theora/parameter_descriptions /camera/image/theora/parameter_updates /rosout /rosout_agg |
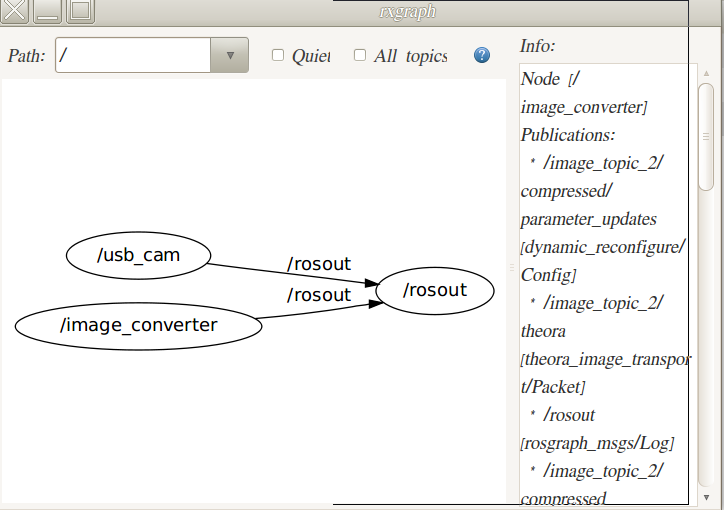
| 2014-01-28 17:21:44 -0500 | marked best answer | How to compile opencv with camera Hello, I try to compile my old projection with opencv. And about connecting camera, I try run code, and to run this node, I should open the camera stream. so I try rosrun usb_cam, which open the Logitech Quick-cam. But I have no idea about how to get this camera stream to link the my own node. and this is my rxgraph: C:\fakepath\Screenshot.png and also my rostopic list as belows: /image_topic /image_topic_2 /image_topic_2/compressed /image_topic_2/compressed/parameter_descriptions /image_topic_2/compressed/parameter_updates /image_topic_2/theora /image_topic_2/theora/parameter_descriptions /image_topic_2/theora/parameter_updates /rosout /rosout_agg /usb_cam/camera_info /usb_cam/image_raw /usb_cam/image_raw/compressed /usb_cam/image_raw/compressed/parameter_descriptions /usb_cam/image_raw/compressed/parameter_updates /usb_cam/image_raw/theora /usb_cam/image_raw/theora/parameter_descriptions /usb_cam/image_raw/theora/parameter_updates Any one can help me? and I aim to build my own opecv-projection on ROS system. Best wishes! |
| 2014-01-28 17:21:41 -0500 | marked best answer | Something is wrong with "cv_bridge" when I rosmake "gencam_cu" package. There are 2 cameras in our project: bumblebee2 and Logitech quickcam C160. And then I want do my research use Logitech quickcam C160, while I can't install the device very well. And I reference to "http://www.ros.org/wiki/gencam_cu", which is said to combine the Logitech Quickcam using OpenCV and publishes image data. And I command it with $ rosmake theora_image_transport, and it report a bug: Any one can help me? PS: and i try anther package which include cv_bridge, but i find the same problems. They all report that :/home/jason/stacks/find_object/cv_bridge/include/cv_bridge/cv_bridge.h:62: error: ‘std_msgs’ has not been declared ... (more) |
| 2014-01-28 17:21:38 -0500 | marked best answer | Are there somebodies use OpenCV2.2 with ROS ? I want to translate my previous code by opencv2.2 into ROS, and I have found many differences between opencv and ROS in image type and some other types. So I wander if some one have already developed a long time on it, please give me some advices? Thanks a lot! |
| 2014-01-28 17:21:38 -0500 | marked best answer | Some problems about the ROS path Hi, My ROS has been installed at /opt/ros/cturtles it shows: jason ros setup.bash setup.sh setup.zsh stacks where the file of "jason" which I create, is to be contained myself packages. Question1, could i create this file for including myself packages? I mean could i create this file under "cturtles" file, or "ros" file , or "stacks" file? Question2,I create a package with 'roscreate-pkg', then I update my ros path.and the command is : and then but it shows [rospack] warning: trailing slash found in ROS_PACKAGE_PATH /opt/ros/cturtle/jason/ros_opencv at the terminal, and the next time,I input the command it shows :[rospack] couldn't find package [ros_opencv] why? Best regards |
| 2013-04-03 07:41:42 -0500 | received badge | ● Famous Question (source) |
| 2012-11-26 04:45:29 -0500 | received badge | ● Famous Question (source) |
| 2012-11-20 03:14:37 -0500 | received badge | ● Famous Question (source) |
| 2012-11-20 03:14:37 -0500 | received badge | ● Notable Question (source) |
| 2012-11-20 03:14:37 -0500 | received badge | ● Popular Question (source) |
| 2012-10-01 02:56:43 -0500 | received badge | ● Famous Question (source) |
| 2012-10-01 02:56:43 -0500 | received badge | ● Notable Question (source) |
| 2012-08-16 11:01:52 -0500 | received badge | ● Notable Question (source) |
| 2012-08-16 11:01:52 -0500 | received badge | ● Famous Question (source) |
| 2012-08-15 05:20:24 -0500 | received badge | ● Famous Question (source) |
| 2012-08-15 05:20:24 -0500 | received badge | ● Notable Question (source) |
| 2012-08-06 15:30:26 -0500 | received badge | ● Notable Question (source) |
| 2012-08-01 01:03:08 -0500 | received badge | ● Famous Question (source) |
| 2012-05-21 04:45:53 -0500 | received badge | ● Notable Question (source) |
| 2012-04-02 21:33:11 -0500 | marked best answer | For new package downloading Hi, May I ask a fresh question, that when i try to run find_object package,it does not be downloaded. And reference is "http://www.ros.org/wiki/find_object/Tutorials/Running%20the%20basic%20find%20object%20demo" I ask some of my colleagues that it only should download one by one files at "https://code.ros.org/svn/wg-ros-pkg/branches/trunk_cturtle/stacks/find_object/",. which is so confused to me, cause it has too many files and sub-files. So could there be anther way to download this SVN source quickly? Best regards. |
| 2012-01-02 13:23:49 -0500 | marked best answer | For new package downloading That tutorial skips over several important preliminary steps. This is the best answer I know. Maybe someone else has a better approach. Install the ROS binary packages if you have not already (see: Ubuntu C-turtle installation). Create your own rosinstall file ( Run rosinstall on that file, and source the You can do all of the above with these shell commands: Follow the tutorial after that. |
| 2011-12-18 15:05:06 -0500 | received badge | ● Popular Question (source) |
| 2011-11-29 00:37:55 -0500 | received badge | ● Notable Question (source) |
| 2011-11-11 14:09:01 -0500 | received badge | ● Popular Question (source) |
| 2011-09-23 02:09:29 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}