The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-04-12 08:24:00 -0500 | marked best answer | pcl_ros in CMakeLists.txt I want to work with pcl_ros in a package but I don't know how to include it in the CMakeLists.txt file. I tried to use: Unfortunately it is not working. I get an error when compiling. I am using ROS Hydro (catkin system) but the perception package (pcl_ros) was downloaded manually and is inside my workspace. I would appreciate if you can help me. [EDIT] |
| 2022-05-15 19:59:11 -0500 | received badge | ● Famous Question (source) |
| 2020-12-25 07:55:46 -0500 | marked best answer | PointCloud2 access data I have a PointCloud2 topic and I need to access the x, y and z of the points. I have found: pcl::PointCloud<pcl::pointxyzrgb>::ConstPtr The problem is that I don't know how to use it. Do you know where can I find some example code describing how to get coordinates in PCL2? [EDIT] Now, I am using this code but it is not working properly Thank you. |
| 2018-02-27 15:44:54 -0500 | received badge | ● Nice Question (source) |
| 2017-07-13 10:08:03 -0500 | received badge | ● Famous Question (source) |
| 2017-01-09 19:18:10 -0500 | received badge | ● Notable Question (source) |
| 2016-07-12 10:33:58 -0500 | received badge | ● Notable Question (source) |
| 2016-05-18 07:28:51 -0500 | received badge | ● Famous Question (source) |
| 2016-05-08 15:49:06 -0500 | marked best answer | Obstacle insertion in map I have a sensor to detect obstacles that are not visible. I want my robot to avoid them because they are dangerous despite not being visible. I have a path planning working with my laser sensor. So, I imagine that the best way of avoiding this potentially harmful points is by introducing them in the obstacle map. Is it possible? How can I do it and prevent the laser clearing them in the map? Thank you EDIT: I am using navigation package with my TOF camera to implement an AMCL and a path planning. The problem I have is that I need to add invisible obstacles (they are recognised by a radio frequency system). My path planning is working properly right now, but I need to introduce more information in the map. |
| 2016-05-08 15:27:47 -0500 | marked best answer | Process images I don't know much about computer vision but what I have to do is pretty simple (At least, it is what I was told). I want to identify red color on the image, and I have read that the first step is to process the image (before the thresholding) but I don't know which filters or operations are usually made. I have already done the cv_bridge transformation to OpenCV format and the threlholding. Does anyone know anything about it? Thank you |
| 2016-04-06 07:00:03 -0500 | marked best answer | Build packages with more than one .cpp I have received some packages from Fuerte which I need to compile in Hydro with catkin. Each package has more than one source file .cpp In rosbuild, there was: rosbuild_add_executable([file1]) rosbuild_add_executable([file2]) In catkin I did the same but with add_executable The problem is that if I add both files (with different names of executables of course) the program doesn't compile If I omit one of them, everything works properly, but I need both. I don't know if the solution is to create two packages or I need to add anything to CMakeLists.txt |
| 2016-03-21 22:53:06 -0500 | received badge | ● Famous Question (source) |
| 2016-03-07 16:11:18 -0500 | received badge | ● Nice Question (source) |
| 2016-03-07 16:11:15 -0500 | marked best answer | Which is each frame? I have a frame tree in which I have /odom and /map frames. My EKF publishes in /odom frame. My AMCL algorithm (I think) creates a transformation between /odom and /map frames. Gazebo gives me the modelStates positions. The problem is that it doesn't specify a frame. By default, it is set to be world_frame. I want to check how good is my AMCL. Because of that I think I should transform my /odom position given by EKF to /map frame and there compare it to gazebo's measurements. However, I don't know where Gazebo is referencing the position. [QUESTION UPDATE] I have two issues that are explined below: 1) Without any AMCL (and without having /map frame in the tree) I used the Gazebo ModelStates topic to check the EKF result assuming that both were published in /odom frame. Was it Ok? 2) Now I have an AMCL running and because of it /map frame appears in the tree. I want to check how good is my AMCL algorithm comparing the pose shown in /amcl_pose (which is in /map frame) with /gazebo/ModelStates topic. How can I do that? I don't know which frame does gazebo use to reference the data in topic ModelStates. Thank you very much |
| 2015-11-04 17:56:27 -0500 | marked best answer | Topic reading inside a callback [EDIT] I have changed my question because I think what I am trying to do is bit different from what was explained here before. I have a Callback and I need to read a different topic inside this callback. I don't know if it is possible, but I have to ensure that some part of the code is only executed if the other topic has a particular value. Any case, I don't know if I can read a topic or execute a particular Callback while I am just executing one callback Thank you. |
| 2015-11-02 01:41:41 -0500 | marked best answer | Migration from Fuerte to Hydro I am working on some code that I haven't made. The thing is that I have to work in Hydro and this code was made for Fuerte. I tried to catkinize the packages changing the manifest.xml and CMakeLists.txt I don't know if it is needed to change anything else but when I try to make the package I get an error. |
| 2015-10-01 09:55:47 -0500 | received badge | ● Famous Question (source) |
| 2015-09-25 08:20:32 -0500 | received badge | ● Favorite Question (source) |
| 2015-09-22 15:56:14 -0500 | received badge | ● Notable Question (source) |
| 2015-07-01 23:29:58 -0500 | received badge | ● Popular Question (source) |
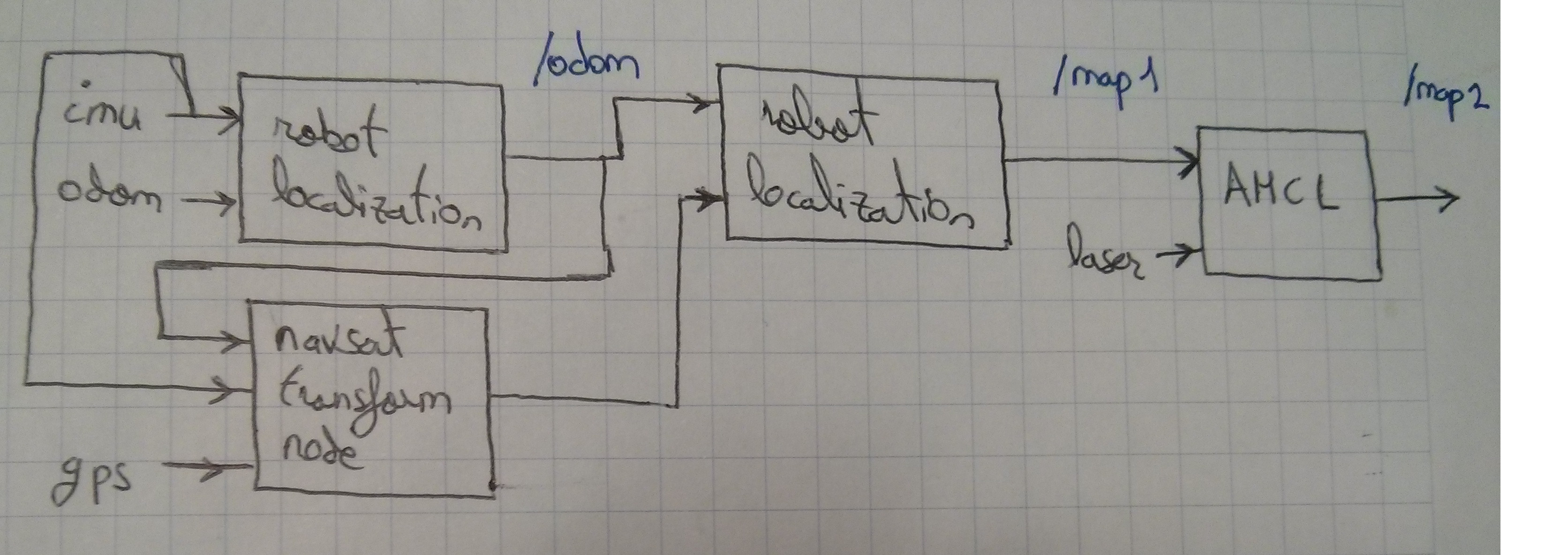
| 2015-06-17 08:07:36 -0500 | marked best answer | robot_localization I've seen the package has changed a lot since I used it the last time. I have a doubt: Is it correct the structure shown in the picture (with two map frames)?
|
| 2015-06-16 09:58:43 -0500 | received badge | ● Famous Question (source) |
| 2015-05-05 07:07:06 -0500 | received badge | ● Famous Question (source) |
| 2015-04-28 21:13:06 -0500 | received badge | ● Popular Question (source) |
| 2015-04-13 23:44:58 -0500 | received badge | ● Notable Question (source) |
| 2015-04-12 15:53:50 -0500 | received badge | ● Popular Question (source) |
| 2015-04-12 15:53:50 -0500 | received badge | ● Famous Question (source) |
| 2015-04-12 15:53:50 -0500 | received badge | ● Notable Question (source) |
| 2015-03-30 08:12:26 -0500 | received badge | ● Popular Question (source) |
| 2015-03-30 03:32:09 -0500 | received badge | ● Famous Question (source) |
| 2015-03-25 10:36:59 -0500 | received badge | ● Famous Question (source) |
| 2015-03-20 09:16:34 -0500 | received badge | ● Notable Question (source) |
| 2015-03-12 08:48:28 -0500 | commented answer | robot_localization gravity removal It is positive, because it has the Z axis going down. I am using this driver: http://wiki.ros.org/microstrain_3dmgx... |
| 2015-03-12 08:46:32 -0500 | received badge | ● Notable Question (source) |
| 2015-03-10 19:50:51 -0500 | received badge | ● Popular Question (source) |
| 2015-03-10 17:50:41 -0500 | commented answer | robot_localization gravity removal I am using 3DM-GX3-5 OEM, which is supported in ROS (It has its own drivers). I think the problem is that the magnetometer is not well calibrated becasuse: 1. The gravity is completely removed in X axis. 2. In the EKF output, the Vy increases continously |
| 2015-03-10 10:04:12 -0500 | asked a question | robot_localization gravity removal I am using the last version of robot_localization. I have a 3DM-GX3-5 OEM IMU sensor in my robot. I want to remove the effect of gravity in the EKF. I have set the parameter in the launchfile so to do that. However, my results are not good because (I suppose) the EKF thinks there is some acceleration in Y axis. I don't know exactcly how does it work, but I can imagine that the filter use the orientation given by the IMU topic to remove the acceleration due to gravity in the 3 axis. If I am right, the problem might be in the orientation calibration. Any idea of what can be happening? |
| 2015-03-04 21:07:34 -0500 | received badge | ● Notable Question (source) |
| 2015-03-04 10:58:49 -0500 | commented question | Wrong turn with move_base I can post my configuration file if you want |
| 2015-03-04 07:58:58 -0500 | asked a question | Wrong turn with move_base Hi I have an autonomous robot using move_base package. When it is moving everything is OK but when it receives a new goal, the initial turn that it makes in place is wrong. It chooses the side that has the biggest angle. [EDIT] I am using the default planner en move_base package. (not dwa) Thank you |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.