The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
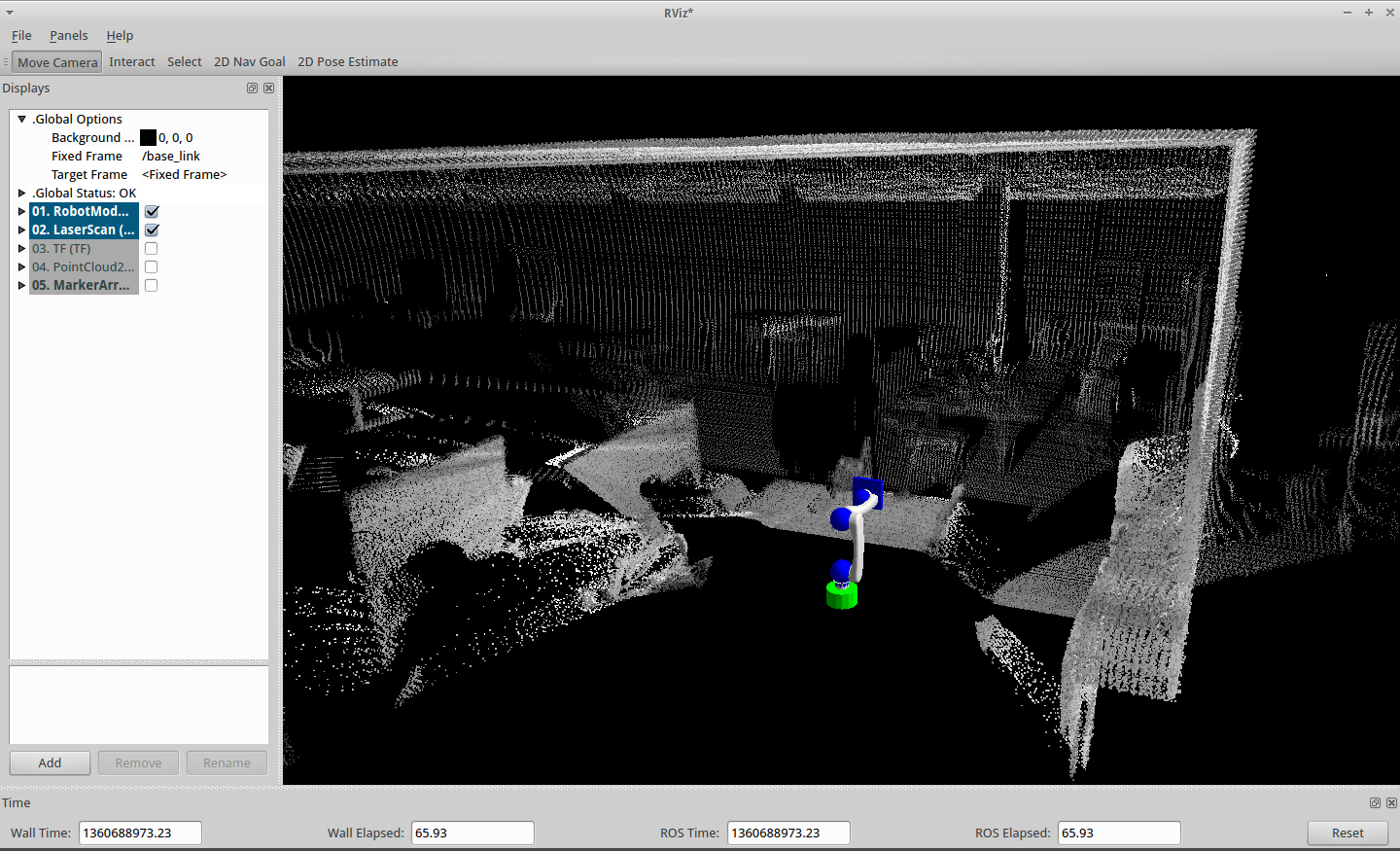
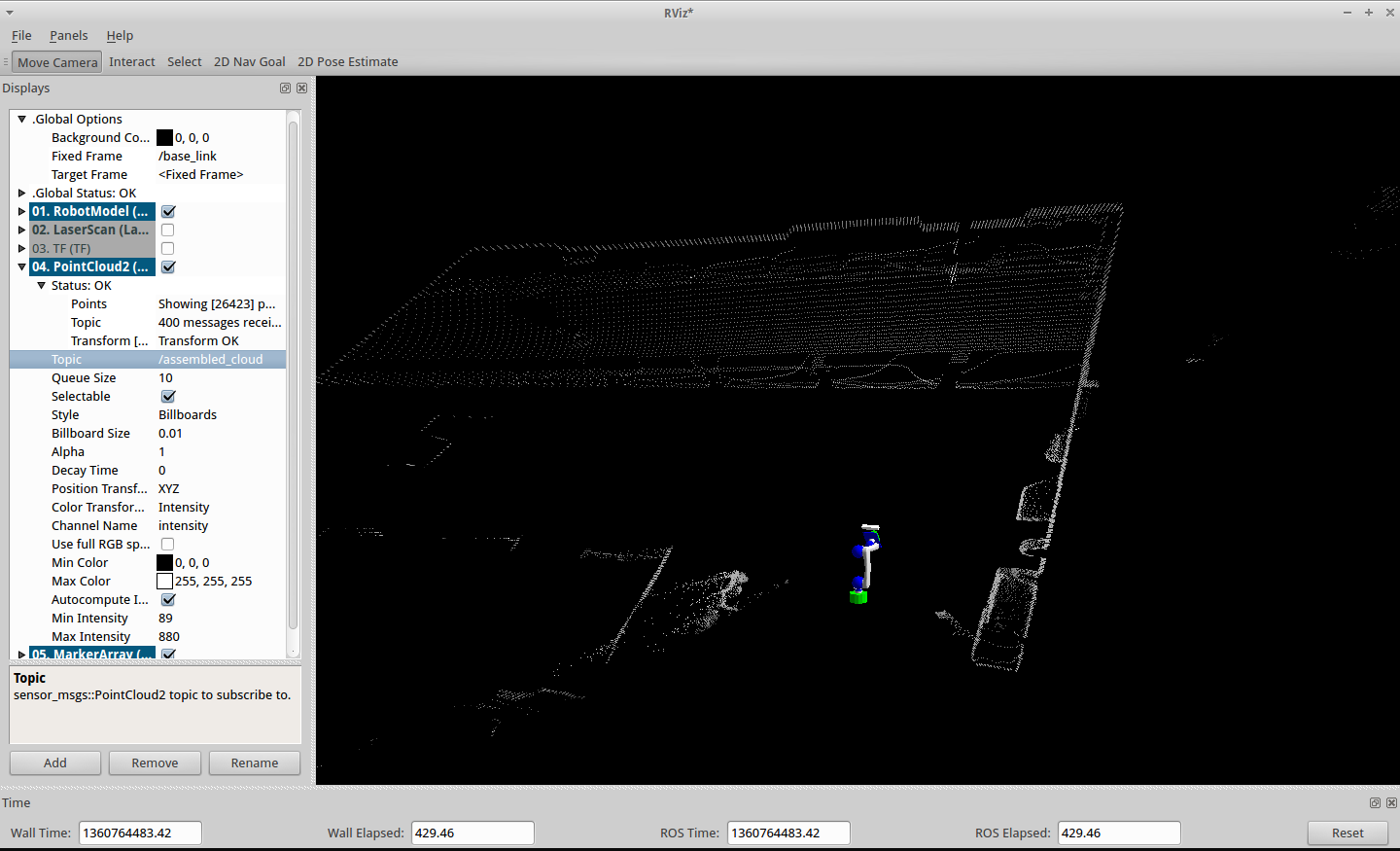
| 2023-05-14 18:59:42 -0500 | marked best answer | Laser scan to point cloud to octomap - strange result Hi, I have a laser scanner mounted on an arm. With laser_pipeline and pcl_assembler, I build a point cloud and pass it to the octomap_server. The pcl_assembler runs every 3 seconds. My problem is, in simulation and Gazebo all works fine. What could be the problem here, or is there anything that works better? Made 2 screenshots, first is just the laser scans, looks great. TF should also be ok.
The 2nd one is the assembled_cloud.
|
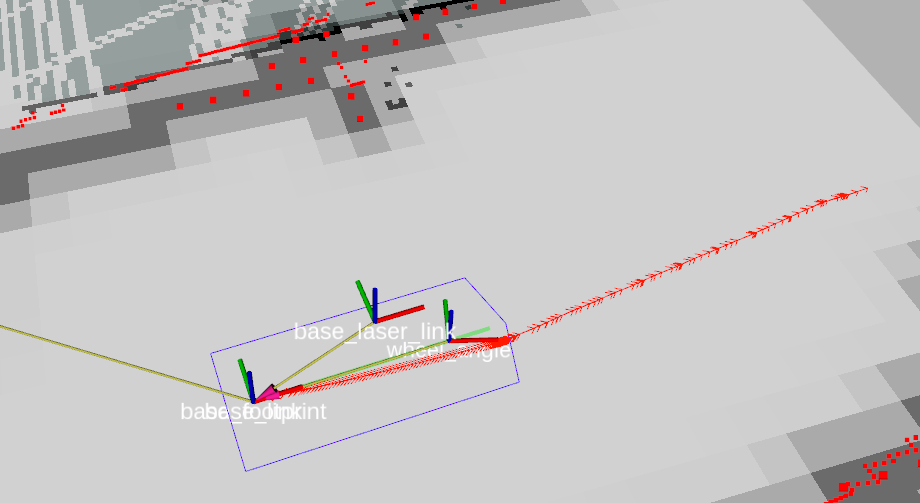
| 2023-01-21 14:24:48 -0500 | marked best answer | Starting point of teb_local_planner Right now i have a car which I want to control with the teb_local_planner at walking speed. So my question is, as the plan inside the footprint is irrelevant, can I use the front bumper as the starting point for the planner?
|
| 2021-11-24 12:50:59 -0500 | received badge | ● Popular Question (source) |
| 2021-11-24 12:50:59 -0500 | received badge | ● Notable Question (source) |
| 2021-09-20 13:33:47 -0500 | received badge | ● Famous Question (source) |
| 2021-08-30 22:09:43 -0500 | received badge | ● Famous Question (source) |
| 2021-05-06 10:19:22 -0500 | marked best answer | How to program a series of different tasks? SMACH? Hi, I am wondering how I can learn my robot to execute a series of tasks. Like this example: I came across SMACH and built a state machine. Also the switching between C++ and Python is a bit annoying to me, because I practically programme C++ and don't really know Python. Is it an acceptable solution to just have a main.cpp and use "if" clauses as a "state machine"? Help appreciated :) |
| 2021-04-09 11:00:00 -0500 | received badge | ● Famous Question (source) |
| 2021-04-01 04:00:01 -0500 | received badge | ● Famous Question (source) |
| 2021-03-03 03:20:54 -0500 | marked best answer | Navfn vs Smac Planner Was just trying out the new smac planner in foxy and I saw some unexpected behavior. It looks like smac planner is ignoring costs when obstacles are too small. Navfn:
Smac:
Costmap looks fine, and on the smac planner param side I think they seem reasonable. |
| 2021-02-27 15:24:48 -0500 | received badge | ● Notable Question (source) |
| 2021-02-26 03:42:43 -0500 | received badge | ● Nice Question (source) |
| 2021-02-26 02:54:22 -0500 | commented question | Navfn vs Smac Planner I used foxy debs. Issue is opened here. |
| 2021-02-26 01:57:55 -0500 | received badge | ● Popular Question (source) |
| 2021-02-24 17:07:52 -0500 | marked best answer | Best way to add new controller which has a custom path as input If I have a custom controller, like a pure pursuit for example, which has a custom path as input. I would like to have it as a plugin to the default controller server but then I need to implement the default interface which has nav_msgs::path as input:
And I have a custom one, say So the best idea I have is to create a custom controller server with it's own costmap. How would you guys accomplish this? |
| 2021-02-22 03:31:23 -0500 | edited question | Navfn vs Smac Planner Navfn vs Smac Planner Was just trying out the new smac planner in foxy and I saw some unexpected behavior. It looks l |
| 2021-02-22 03:29:48 -0500 | asked a question | Navfn vs Smac Planner Navfn vs Smac Planner Was just trying out the new smac planner in foxy and I saw some unexpected behavior. It looks l |
| 2021-01-28 10:09:54 -0500 | received badge | ● Notable Question (source) |
| 2020-12-30 04:26:54 -0500 | received badge | ● Famous Question (source) |
| 2020-12-22 15:15:52 -0500 | received badge | ● Famous Question (source) |
| 2020-10-26 13:48:37 -0500 | marked best answer | Can't receive data in python node Hi, I don't know how to debug this: But echo gives me data from both publishers... Namespace is correct, topic is correct. I am running on empty now ... As requested cpp publisher: |
| 2020-10-21 08:24:04 -0500 | received badge | ● Necromancer (source) |
| 2020-10-20 08:54:10 -0500 | received badge | ● Popular Question (source) |
| 2020-10-20 08:54:10 -0500 | received badge | ● Notable Question (source) |
| 2020-10-19 10:06:54 -0500 | received badge | ● Famous Question (source) |
| 2020-10-18 03:30:13 -0500 | received badge | ● Famous Question (source) |
| 2020-10-09 03:16:58 -0500 | edited answer | Could NOT find FastRTPS (missing: FastRTPS_INCLUDE_DIR FastRTPS_LIBRARIES) My workaround is to add this in your .bashrc: export CMAKE_PREFIX_PATH=$AMENT_PREFIX_PATH This way I don't need to |
| 2020-10-09 03:15:44 -0500 | answered a question | Could NOT find FastRTPS (missing: FastRTPS_INCLUDE_DIR FastRTPS_LIBRARIES) My workaround is to add this in your .bashrc: export CMAKE_PREFIX_PATH=$AMENT_PREFIX_PATH or also this: ( but Ament |
| 2020-10-03 17:39:06 -0500 | received badge | ● Famous Question (source) |
| 2020-09-20 18:04:42 -0500 | received badge | ● Famous Question (source) |
| 2020-09-17 06:05:13 -0500 | received badge | ● Notable Question (source) |
| 2020-08-04 15:40:25 -0500 | received badge | ● Popular Question (source) |
| 2020-08-03 06:37:26 -0500 | edited question | Parameter events on foxy? Parameter events on foxy? I just switched to ROS2 foxy and now my parameter events don't work anymore. I couldn't find |
| 2020-08-03 06:36:07 -0500 | commented question | Parameter events on foxy? Well, I just found out, that when adding a namespace it won't work. I suppose you don't have namespaced nodes.. |
| 2020-07-30 04:14:42 -0500 | received badge | ● Notable Question (source) |
| 2020-07-28 09:09:41 -0500 | asked a question | Parameter events on foxy? Parameter events on foxy? I just switched to ROS2 foxy and now my parameter events don't work anymore. I couldn't find |
| 2020-07-27 15:06:44 -0500 | received badge | ● Popular Question (source) |
| 2020-07-24 08:01:23 -0500 | edited question | Can't find library added to a ros pkg which itself is linked to another ros pkg Can't find library added to a ros pkg which itself is linked to another ros pkg I have a ros library called common which |
| 2020-07-24 07:59:58 -0500 | asked a question | Can't find library added to a ros pkg which itself is linked to another ros pkg Can't find library added to a ros pkg which itself is linked to another ros pkg I have a ros library called common which |
| 2020-07-24 01:19:26 -0500 | received badge | ● Popular Question (source) |
| 2020-07-22 15:12:49 -0500 | asked a question | rviz over ssh rviz over ssh We have a host with ubuntu 18.04 and ROS2 eloquent installed. Then we have 2 clients, one with native ubu |
| 2020-07-11 09:58:49 -0500 | received badge | ● Notable Question (source) |
| 2020-07-11 09:58:49 -0500 | received badge | ● Famous Question (source) |
| 2020-05-21 15:56:04 -0500 | answered a question | Unable to load ROS2 workspace into CLion Well, you can open your whole workspace and then just go to the projects CMakeLists file and right click load the projec |
| 2020-05-21 03:19:07 -0500 | received badge | ● Notable Question (source) |
| 2020-05-13 03:41:43 -0500 | received badge | ● Famous Question (source) |
| 2020-05-06 11:14:04 -0500 | received badge | ● Famous Question (source) |
| 2020-05-03 22:16:57 -0500 | received badge | ● Famous Question (source) |
| 2020-04-21 22:03:42 -0500 | received badge | ● Notable Question (source) |
| 2020-04-21 17:33:13 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.