The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-12-30 04:18:19 -0500 | received badge | ● Good Question (source) |
| 2020-12-15 14:24:29 -0500 | received badge | ● Nice Question (source) |
| 2020-05-03 23:36:22 -0500 | marked best answer | Multiple subscriber queue allocation using the same callback I am creating multiple subscribers using the same callback function as in this post, the code is here. Basically is this: In this case to whom is assigned I would like to think that Is the |
| 2020-03-26 16:44:09 -0500 | received badge | ● Famous Question (source) |
| 2019-06-08 22:33:13 -0500 | commented answer | GLib-GObject-CRITICAL **: 16:48:21.136: g_object_unref: assertion 'G_IS_OBJECT (object)' failed Attempt to unlock mutex that was not locked Aborted (core dumped) This is related to this solution, I think the image_view package has to be revised. |
| 2019-06-08 22:30:26 -0500 | commented answer | Unable to view image using image_view in ROS Indigo with rosberrypi_cam This works, but at this date 2019/Jun/09, it has not been fixed in the image_view package. In the meanwhile I use rqt_im |
| 2019-06-08 22:30:04 -0500 | commented answer | Unable to view image using image_view in ROS Indigo with rosberrypi_cam This works, but at this date 2019/Jun/09 its has not been fixed in the image_view package. In the meanwhile I use rqt_im |
| 2019-06-08 22:28:51 -0500 | commented answer | Unable to view image using image_view in ROS Indigo with rosberrypi_cam This works, but at this date 2019/Jun/09 its has not been fixed in the image_view package. In the meanwhile I use rqt_im |
| 2019-06-08 22:28:36 -0500 | commented answer | Unable to view image using image_view in ROS Indigo with rosberrypi_cam This works, but at this date 2019/Jun/09 its has not been fixed in teh image_view package. In teh meanwhile I use rqt_im |
| 2018-12-07 02:50:43 -0500 | received badge | ● Famous Question (source) |
| 2018-05-30 05:06:38 -0500 | received badge | ● Famous Question (source) |
| 2018-03-22 02:48:29 -0500 | received badge | ● Famous Question (source) |
| 2018-01-22 09:07:26 -0500 | received badge | ● Famous Question (source) |
| 2017-12-22 14:31:07 -0500 | received badge | ● Notable Question (source) |
| 2017-09-15 14:03:37 -0500 | received badge | ● Notable Question (source) |
| 2017-06-23 03:51:20 -0500 | received badge | ● Famous Question (source) |
| 2017-01-29 11:58:18 -0500 | received badge | ● Popular Question (source) |
| 2016-11-01 05:04:43 -0500 | received badge | ● Popular Question (source) |
| 2016-10-31 00:36:41 -0500 | received badge | ● Notable Question (source) |
| 2016-10-31 00:30:55 -0500 | asked a question | How to run "tf view_frames" for a remapped tf I remapped |
| 2016-10-12 23:54:06 -0500 | received badge | ● Notable Question (source) |
| 2016-09-28 01:24:22 -0500 | received badge | ● Popular Question (source) |
| 2016-09-28 00:36:30 -0500 | answered a question | Can't ssh by name with more than 3 robots I asked here and solved the problem. I had to configure the |
| 2016-09-27 08:02:51 -0500 | commented question | Can't ssh by name with more than 3 robots Well, I use it on robots using ROS, so maybe someone had this issue and can guide me. |
| 2016-09-27 03:19:45 -0500 | asked a question | Can't ssh by name with more than 3 robots I am using a main computer to launch the ros nodes in 4 robots. These robots have odroids. I can I can ssh by name to all the robots except 1 The network is done with a router, and something funny is happening. If I do not connect the router to internet I cannot ssh I think I might have some configuration problems but I do not know how to debug them. Today I reinstalled Ubuntu from zero on I even tried with a different router and I have the same problem. I think I need to configure something but I don't know what. |
| 2016-09-11 04:27:30 -0500 | marked best answer | How to start a ROS node on startup? I am using an Odroid U3 with my robot, Ubuntu 14.04. I am using an external computer to launch the ROS node of the robot. I was wondering if there is a way to start ROS in the robot after the Odroid starts up. Like if the robot were turned on with the ROS node running after the startup. That way I would not have to use the external computer. Right now I do not need to monitor the robot so it is OK if I do not have a roscore running externally. |
| 2016-08-29 04:32:24 -0500 | received badge | ● Notable Question (source) |
| 2016-08-27 03:28:15 -0500 | received badge | ● Popular Question (source) |
| 2016-08-27 01:27:56 -0500 | received badge | ● Nice Question (source) |
| 2016-08-21 20:09:03 -0500 | asked a question | Code snippet license If I use a code snippet from ros answers, then, should my program be at least CC licensed? What if I use an url link to the answer as a comment inside my code? |
| 2016-07-19 03:04:21 -0500 | received badge | ● Notable Question (source) |
| 2016-06-27 07:11:41 -0500 | received badge | ● Popular Question (source) |
| 2016-06-23 22:52:07 -0500 | asked a question | How to run without a machine name from launch file? I have a group of robots. I start the programs from a "master" computer. In that computer I set up the machine names and then from a main launch file I decide with programs to run in which robot/machine, everything works. Now, I am debugging one of the programs independently, so there is no need to assign machine names. Usually I am calling several launch files, and in the launch files I run nodes like this: If I do not set up the machine name beforehand, ROS trows an error. So, is there a way to run in "this machine" without assigning a machine name? I mean, without having to change the launch files or running the configuration script to assign a machine name. The program I am want to debug is not in the same package as the configuration file so with this I would not have to make changes in the launch files every time I want to debug. |
| 2016-04-26 08:45:11 -0500 | marked best answer | Select between a network or local publisher I am running 4 robots in a network. I was wondering if it is possible to select/configure if a published topic is available for all the robots in the network or only for itself. Right now when I run the programs all the topics are available for everyone in the network. A robot is processing an image and at the same time it is sending information through the network, I think it makes no sense to publish the image topics on the network. In other words if a topic is not needed on the network, does it get published on the network? This question is related. |
| 2016-04-26 03:54:34 -0500 | received badge | ● Famous Question (source) |
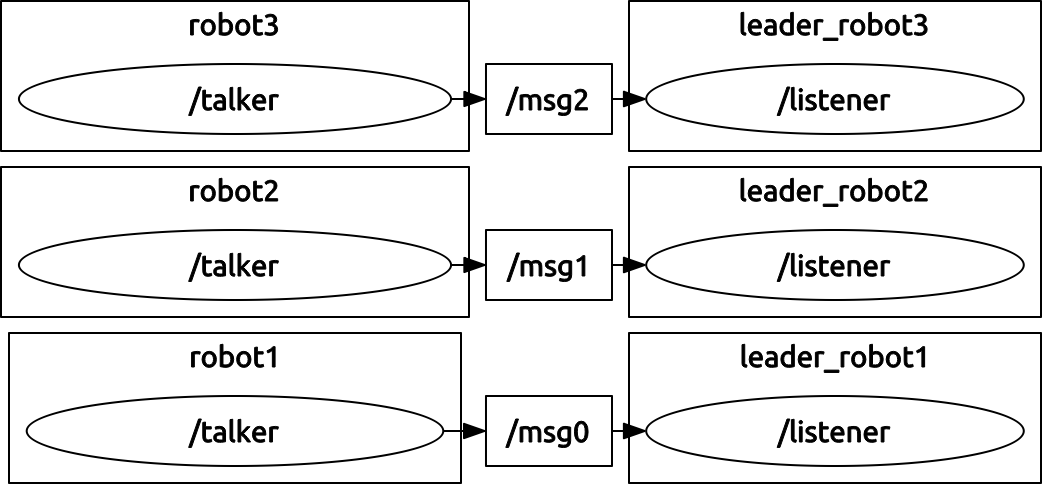
| 2016-04-26 01:22:56 -0500 | marked best answer | Network data loss using 4 robots I have a group of four robots. Right now I am doing testings on the data transmission over a wireless network, the output of
So, I have 4 robots, 3 sending, 1 receiving. I want my application to be as real time as possible. I am running at 30 Hz. First I tough to put nothing on the stack, so the data I receive is always the newest one, the publishers and subscribers are set with a stack size of 1, but with that I lose a lot of data. The output is shown below:
I print out whenever Then, I tried increasing the stack to 10 elements, and the output was improved: If I increase the stack then I start experiencing a lag. I think I will have to do a trade between the speed in the transmission and the stack size to something that suits my application. But, I was wondering if there is a way to improve the network communication? Maybe some settings in ROS or my network that I am not taking into account. EDIT 1 As al_dev suggested, changing to UDP improved the transmission, but now I can't get to work one detail. I am ... (more) |
| 2016-04-04 09:08:21 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.