The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-01-05 14:13:43 -0500 | marked best answer | How to store the depth data from kinect(/camera/depth_registrered/image_raw) as gray scale image? I want to get the depth data from kinect by receiving sensor_msgs/Image from topic /camera/depth_registrered/image_raw(reference), I use cv_bridge to store the data to a gray scale image. I use this snippet of code to receive sensor_msgs/Image from topic /camera/depth_registrered/image_raw, change it to gray scale image by cvBridge, and then store the image to a jpeg file. This is the jpeg file I stored, I suppose the value in this picture should vary from 0 to 255. However, I found the values in this picture are either 0 or 255(only black and white).
I use Did I miss something? Thanks in advance. ---EDIT--- Thanks to DamienJadeDuff's comment, I learned that the raw data from msg sensor_msgs/Image is uint8, and the data contained in /camera/depth_registered/image_raw is uint16 depths in mm. Does this means depth data is retrieved from combining two uint8 data? |
| 2019-06-12 22:44:34 -0500 | received badge | ● Great Question (source) |
| 2019-01-18 02:25:43 -0500 | received badge | ● Nice Question (source) |
| 2018-01-28 13:19:33 -0500 | received badge | ● Famous Question (source) |
| 2017-10-31 09:01:41 -0500 | received badge | ● Notable Question (source) |
| 2017-10-31 00:38:01 -0500 | marked best answer | Import error: No module named 'glob' Dear all, I got an import error from executing However, I can import glob in python2.7: Also, I can locate it under Thus, I guess that the problem occurs because the python executable which runs xacro.py can't locate the module glob in its path. So I tried to append /usr/lib/python2.7 to my PYTHONPATH, but this doesn't work. Does anyone know how to solve this issue? Thanks for any suggestion : ) P.S. I am using Ubuntu 14.04+ROS Indigo, and my Reference: |
| 2017-10-30 20:25:45 -0500 | received badge | ● Popular Question (source) |
| 2017-10-30 20:10:23 -0500 | edited answer | Import error: No module named 'glob' Based on the advice from jarvisschultz & bpinaya, I removed the miniconda/anaconda part in ~/.basrc: # added by Min |
| 2017-10-30 20:09:49 -0500 | answered a question | Import error: No module named 'glob' Based on the advice from jarvisschultz & bpinaya, I removed the miniconda/anaconda part in ~/.basrc: # added by Min |
| 2017-10-30 20:09:11 -0500 | commented question | Import error: No module named 'glob' Thanks to both of you jarvisschultz & bpinaya!!! The problem is caused by miniconda, I'll leave the result in the an |
| 2017-10-30 10:35:05 -0500 | edited question | Import error: No module named 'glob' Import error: No module named 'glob' Dear all, I got an import error from executing roslaunch pr2_gazebo pr2_no_controll |
| 2017-10-30 10:34:22 -0500 | asked a question | Import error: No module named 'glob' Import error: No module named 'glob' Dear all, I got an import error from executing roslaunch pr2_gazebo pr2_no_controll |
| 2017-08-20 09:23:21 -0500 | commented question | How to stop moving of turtlebot on ROS Hydro Gazebo? Hi! I cannot reproduce your problem. There seems no turtlebot_empty_world.launch in turtlebot_gazebo package: https://gi |
| 2017-08-20 09:23:03 -0500 | commented question | How to stop moving of turtlebot on ROS Hydro Gazebo? Hi! I cannot reproduce your problem. There seems no turtlebot_empty_world.launch in turtlebot_gazebo paxkage. https://g |
| 2017-07-25 09:02:40 -0500 | received badge | ● Good Question (source) |
| 2017-03-01 07:40:42 -0500 | received badge | ● Good Answer (source) |
| 2017-01-26 06:38:18 -0500 | received badge | ● Famous Question (source) |
| 2016-12-20 17:32:26 -0500 | received badge | ● Taxonomist |
| 2016-09-21 01:47:31 -0500 | received badge | ● Nice Question (source) |
| 2016-09-12 05:24:30 -0500 | received badge | ● Nice Answer (source) |
| 2016-06-23 16:24:22 -0500 | received badge | ● Nice Answer (source) |
| 2016-05-31 08:22:45 -0500 | marked best answer | Does roslaunch support topic remapping from command line? Hi all, The roslaunch page says that we can remap topic by simply adding this line to launch file. I want to ask if we can do the same thing in command line? Thanks~ |
| 2016-04-26 08:35:31 -0500 | marked best answer | Error on genmsg/template_tools.py (AttributeError: 'module' object has no attribute 'Interpreter') Hi all, I want to generate msg header files in a 64-bit Ubuntu 12.04 (ROS Hydro) by I think the error might relates to anaconda I installed before, because when I type and when I So I remove the anoconda from my path by But even I set the PATH to exlude anaconda/bin, I still got the same error when I FYI, here's my error messages:
(I think the key error is |
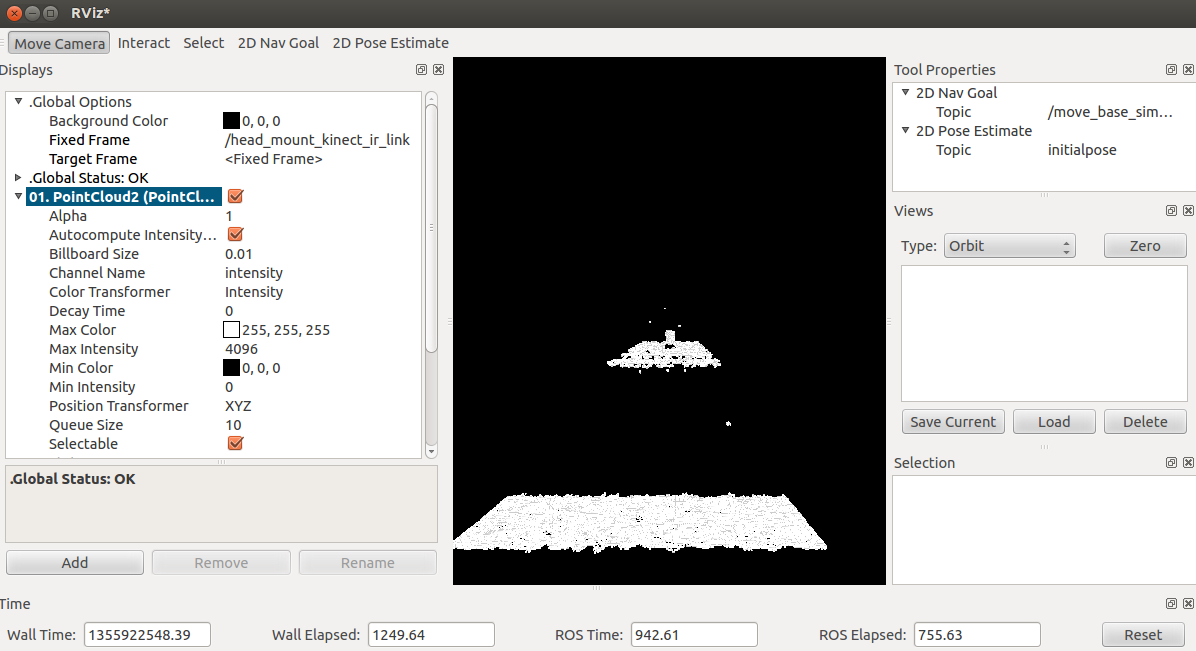
| 2016-04-05 06:16:13 -0500 | marked best answer | What does "Is /clock being published?" error means? Hi all, I want to test the function of tabletop_segmentation.But when my node send a service request to /tabletop_segmentation, I always get messages indicate that "NO_CLOUD_RECEIVED". The problem is /tabletop_segmentation node receive no data from /narrow_stereo_textured/points2.(This topic exists, though) To test /narrow_stereo_textured/points2, I started gazebo by And I use rviz to see what /narrow_stereo_textured/points2 published, and I can see the content by changing Fixed frame from /map to /head_mount_kinect_ir_frame.
However, when I try to rostopic echo this topic, I got And the segmentation fails as usual, does anyone know how to solve this problem? I want to test the function of segmentation alone. Thanks. EDIT: This problem doesn't occur on another computer, which is also fuerte on ubuntu 12.04. I tried sudo apt-get dist-upgrade but I still got the error. |
| 2016-03-17 06:34:45 -0500 | received badge | ● Popular Question (source) |
| 2016-01-12 11:10:03 -0500 | received badge | ● Good Question (source) |
| 2015-11-05 22:08:42 -0500 | received badge | ● Notable Question (source) |
| 2015-11-05 22:08:42 -0500 | received badge | ● Famous Question (source) |
| 2015-11-05 22:08:42 -0500 | received badge | ● Popular Question (source) |
| 2015-10-06 19:26:12 -0500 | received badge | ● Famous Question (source) |
| 2015-09-28 07:26:29 -0500 | received badge | ● Nice Answer (source) |
| 2015-08-25 04:30:34 -0500 | received badge | ● Nice Answer (source) |
| 2015-08-04 03:10:07 -0500 | received badge | ● Notable Question (source) |
| 2015-08-03 08:24:54 -0500 | commented answer | tf error base_link to map The key is to find which node want this tf relationship. |
| 2015-07-30 20:25:36 -0500 | edited answer | tf error base_link to map The message is complaining that So modify your code by changing the arguments of |
| 2015-07-30 12:11:11 -0500 | answered a question | I want to checkout SLAM from https://code.ros.org/svn/ros-pkg/stacks/vslam/trunk by SVN,but the url cannot be available. how to get vslam_system. There are some backup files in other people's repo: |
| 2015-07-30 12:05:30 -0500 | commented question | RGBDslam package missing node RGBDslam Do you really got the executable when catkin_make? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.