The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-04-29 03:49:51 -0500 | marked best answer | Run one node in another node? The subject looks weird and difficult to understand so I am going to explain what I mean here. I want to know if it is possible to run a node inside another node. For example, when you have written a ROS node A and what you want A to do is to run other several ROS nodes B, C, D and etc. How to implement that? I don't want to use roslaunch to run several nodes in this case because after node A has run other nodes, it also has to do other stuff. To go further, I want to write a ROS server and what it is supposed to do is waiting for "node request", that is , when a client calls this service, the server tries to run a node instantaneously. That is to say, how to run nodes in a service server? I think this case is essentially the same as the former one. Any suggestions are appreciated very much. |
| 2021-01-13 18:34:32 -0500 | marked best answer | setup.bash setup.sh setup.zsh I want to find out the differences between 3 files created when using the command 'rosws init ~/fuerte-ws /opt/ros/fuerte' : setup.bash setup.sh setup.zsh. In the rosbuild tutorial, it tells me to source setup.sh. But in catkin tutorial, we source setup.bash. So do these three files serve the same function? Why no one uses setup.zsh? What is it? Thank you very much. |
| 2020-12-24 02:34:18 -0500 | received badge | ● Nice Answer (source) |
| 2020-11-06 09:09:46 -0500 | received badge | ● Good Question (source) |
| 2020-06-06 20:54:15 -0500 | received badge | ● Taxonomist |
| 2020-05-29 08:06:47 -0500 | received badge | ● Famous Question (source) |
| 2019-08-01 21:25:55 -0500 | received badge | ● Nice Question (source) |
| 2019-03-27 07:56:52 -0500 | marked best answer | PR2 rqt_plot has the error TopicCompleter.update_topics(): could not get message class I have written a publisher It seems that rqt_plot cannot subscribe to the topic. But curiously, indeed I can "rostopic list" this topic in the same terminal. So how to let rqt_plot subscribe successfully to the topic and plot my data? |
| 2019-03-27 07:56:51 -0500 | received badge | ● Teacher (source) |
| 2019-03-27 07:56:51 -0500 | received badge | ● Self-Learner (source) |
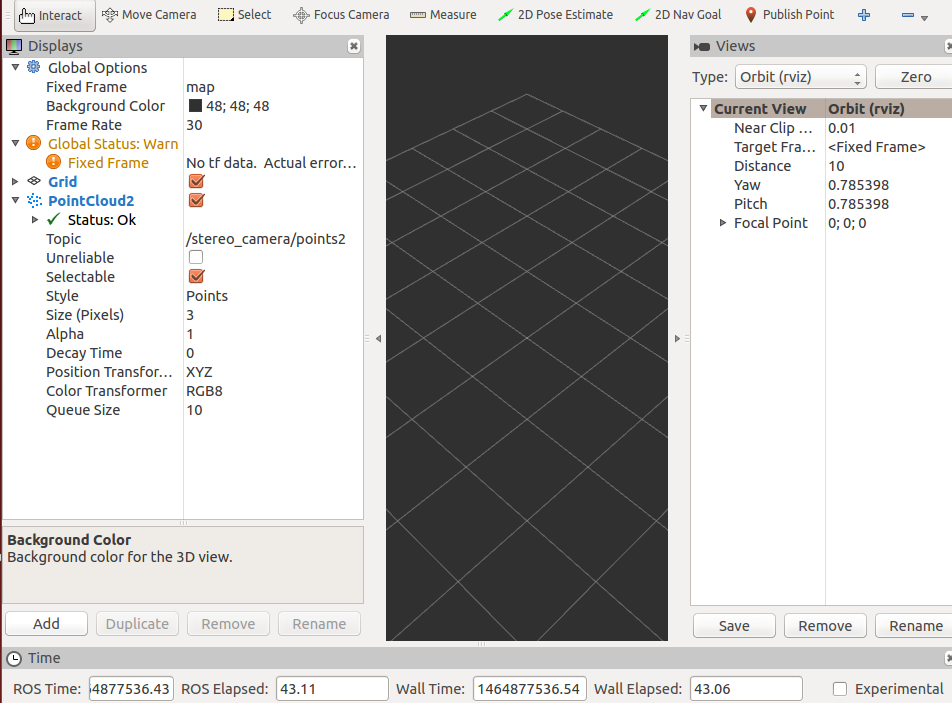
| 2018-09-19 17:18:56 -0500 | marked best answer | Can't view the pointclouds in the rviz I use the bumblebee2 get stereo picture of the left and right image,and use the stereo_image_proc package to deal with it . i got the rect image and disparity image with no problem, and use the command of "rostopic echo /stereo_camera/pointclouds2",got the pointclouds data as followed
I think it's not the problem of "tf data",as i use the bumbleebee on line get the pointclouds picture by rviz have the same warn of "tf data",but it's no matter to view the pointclouds in the rviz! |
| 2018-05-26 02:23:17 -0500 | received badge | ● Favorite Question (source) |
| 2018-02-28 14:58:55 -0500 | received badge | ● Famous Question (source) |
| 2018-02-27 04:05:26 -0500 | received badge | ● Good Question (source) |
| 2018-02-20 22:03:56 -0500 | marked best answer | Real time ROS node without ROS control, orocos? I have a hardware controller node which controls three motors using SOEM with Ethercat. I use a ROS timer in this node with 500 Hz control frequency. However, I find out that the timer is not accurate at all; sometimes there is a 100ms delay and cause the Ethercat to send 'stop-working' commands to motors. So I plan to use a RT_PREEMPT patch to the current Linux kernel to solve the 'jitter' problem. However, I want to solve this problem with least effort possible. So what is the possible shortcut? And are there any problems if I only use the RT_PREEMPT patch without using ros_control or orocos framework as many people are actually using them? Another problem is how to choose a suitable realtime priority for my hardware controller node? |
| 2017-12-08 09:20:40 -0500 | received badge | ● Popular Question (source) |
| 2017-12-08 09:20:40 -0500 | received badge | ● Notable Question (source) |
| 2017-09-30 02:23:39 -0500 | marked best answer | The difference between Spin() and SpinOnce(). Can someone tell me the difference between Spin() and SpinOnce()? And what exactly they are doing, is it like a while loop to process some ROS stuff? |
| 2017-09-29 10:56:08 -0500 | marked best answer | ros service dead lock? This is the situation: In the meanwhile, node B also has a service client which calls a service server defined in node A for all the time. In other words, there are a service client and server in node A, and there are also a service server and client in node B. And they call each other all the time. Now comes the problem, the program hangs there and no call is successful. It seems there is a deadlock. Any one could give me a detailed explanation? And any one could provide me with a solution? Thanks! Node A: Node B: |
| 2017-09-20 14:36:14 -0500 | received badge | ● Famous Question (source) |
| 2017-08-30 06:07:25 -0500 | received badge | ● Famous Question (source) |
| 2017-07-21 21:18:38 -0500 | commented answer | Can ROS Service be used in Real-time Application or Hardware Control? @ahendrix Have you seen my comments? |
| 2017-07-19 17:18:46 -0500 | received badge | ● Famous Question (source) |
| 2017-07-19 03:32:56 -0500 | commented answer | Can ROS Service be used in Real-time Application or Hardware Control? For example, the gazebo_plugin uses extensively the custom call back queues. Does it serve the purpose of processing the |
| 2017-07-19 03:29:41 -0500 | commented answer | Can ROS Service be used in Real-time Application or Hardware Control? Thank you very much. Sorry but the information is overwhelming. I try to use ros_control before but I think the document |
| 2017-07-17 19:52:41 -0500 | commented answer | Can ROS Service be used in Real-time Application or Hardware Control? Thank you for this comment. Could you provide me with the related code so that I know how to write this for our own rob |
| 2017-07-17 13:27:06 -0500 | marked best answer | Can ROS Service be used in Real-time Application or Hardware Control? I have 3 related questions about ROS service:
|
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
 then i want to use the rviz to see the pointclouds picture ,it failed.
then i want to use the rviz to see the pointclouds picture ,it failed.